怎么做县城分类信息网站wordpress文章转移
触觉感知对于实现人类水平的机器人操作能力至关重要。而视觉触觉传感器(VBTS)作为一种有前景的解决方案,通过相机捕捉弹性凝胶垫的形变模式来感知接触的方式,为视触觉机器人提供了高空间分辨率和成本效益。然而,这些传感器复杂的物理特性和视觉信号处理需求为机器人应用带来了独特的挑战。缺乏高效且准确的VBTS模拟工具,极大地限制了触觉机器人的研究。本文提出了Taccel,一个高性能的模拟平台,集成了增量势能接触(IPC)和自适应动力学(ABD)方法,以高精度和前所未有的速度模拟机器人、触觉传感器和物体,在数千个并行环境中实现了超过实时18倍的加速。与以往在亚实时速度下运行且并行化有限的模拟器不同,Taccel提供了精确的物理模拟和逼真的触觉信号,并且还通过用户友好的API支持灵活的机器人-传感器配置。论文地址:https://arxiv.org/abs/2504.12908Taccel的核心技术与方法
Taccel的核心技术包括增量势能接触(IPC)和自适应动力学(ABD)。IPC是一种先进的接触处理方法,能够确保无穿透和无反转的物理模拟,特别适用于复杂接触场景,如凝胶垫与物体的交互。IPC通过引入屏障能量和摩擦势能,能够精确模拟接触力和摩擦力,从而生成逼真的触觉信号。ABD则是一种高效的刚体和软体动力学模拟方法,通过减少自由度(DoF)和优化计算流程,显著提升了模拟效率。ABD特别适用于机器人连杆和刚性物体的模拟,能够与IPC无缝结合,实现高精度的物理模拟。此外,Taccel通过深度神经网络(DNN)生成高分辨率的RGB触觉信号,模拟凝胶垫的形变和接触模式。DNN通过训练真实触觉数据,能够生成逼真的RGB图像和深度图,为触觉感知任务提供高质量的数据支持。Taccel还支持低分辨率的标记点跟踪,能生成局部形变模式,并将深度图和标记点转换为3D点云,提供空间信息。这些技术的结合使得Taccel能够在保证物理精度的同时,实现超过实时18倍的模拟速度,支持数千个并行环境。Taccel的应用与性能评估
Taccel在多种触觉机器人任务中展示了其有效性。在物体识别任务中,使用合成触觉数据训练的模型在真实数据上表现出色,无需领域适应。例如,在一个包含10种机械零件的分类任务中,模型在合成数据上的准确率达到86.50%,在真实数据上的准确率达到70.94%。这一结果表明,Taccel生成的触觉信号具有高度的真实性和可迁移性。在机器人抓取任务中,Taccel支持多种机器人手配置,生成大规模抓取数据集,为算法开发提供了丰富的数据支持。通过扩展DFC算法,Taccel能够生成优化的抓取姿态,确保凝胶垫与物体表面的垂直接触,从而提升触觉感知的效果。在关节物体操作任务中,Taccel能够精确模拟复杂的操作场景,如抽屉、柜门和螺栓螺母的装配。例如,在Tac-Man框架中,Taccel通过模拟凝胶垫的形变和接触力,实现了微波炉门和抽屉的精确操作,模拟结果与真实实验高度一致。性能评估表明,Taccel在复杂接触场景中表现出色,生成的触觉信号与真实数据高度一致,平均SSIM达到0.93。此外,Taccel在单个NVIDIA H100 GPU上支持超过4096个并行环境,模拟速度超过实时18倍,显著提升了数据生成和算法开发效率。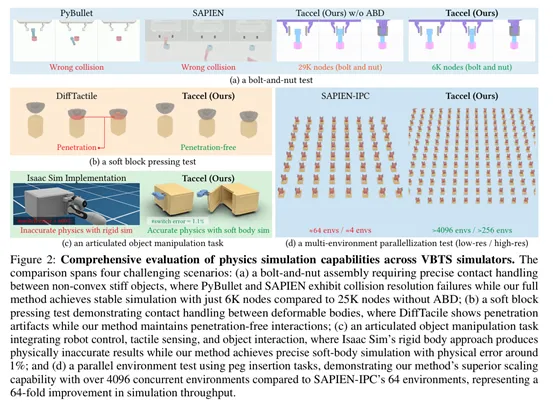
Taccel的优势与未来工作
Taccel通过其高性能、灵活性和精确性,为触觉机器人研究提供了一个强大的工具。其用户友好的API支持灵活的机器人-传感器配置,用户可以通过简单的Python脚本加载机器人、传感器和物体,并设置模拟参数。Taccel的高效并行化能力使其能够同时模拟数千个环境,为大规模数据生成和算法开发提供了可能。例如,在一个低分辨率的插销插入任务中,Taccel在4096个并行环境下的模拟速度达到915 FPS,超过实时18倍。在高分辨率的灵巧手操作任务中,Taccel在256个并行环境下的模拟速度达到12.67 FPS,仍然保持较高的效率。未来,Taccel的优化方向包括进一步优化计算效率、开发实时渲染功能以及扩展更多机器人应用场景。例如,通过优化线性系统求解器和简化模拟协议,Taccel可以进一步提升模拟速度;通过开发图形用户界面,Taccel可以降低使用门槛,吸引更多研究人员参与触觉机器人研究。这些改进将使Taccel成为触觉机器人研究不可或缺的平台,加速机器人系统的开发和应用。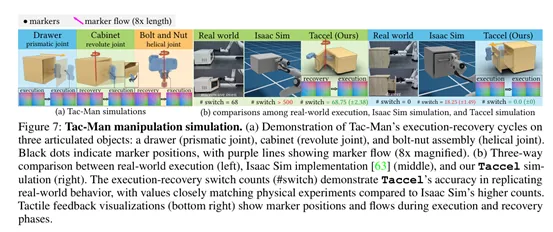
总结
Taccel是一个基于高性能GPU模拟的视觉触觉机器人平台,通过集成IPC和ABD技术,实现了高精度、高效率的物理模拟和触觉信号生成。其在物体识别、机器人抓取和关节物体操作中的广泛应用展示了其强大的能力。Taccel的推出为触觉机器人研究提供了新的工具,有望推动机器人与物理环境的交互和理解方式的变革。通过支持大规模模拟和高质量数据生成,Taccel将加速触觉机器人算法的开发,为未来智能机器人系统的实现奠定基础。参考文献:Y. Li et al., "Taccel: Scaling Up Vision-based Tactile Robotics via High-performance GPU Simulation,"arXiv preprint arXiv:2504.12908, Apr. 2025.