上海营销型企业网站怎么做seo

简单的介绍:本文所述的代码实现了一种基于交互多模型(IMM)算法的目标跟踪仿真,适用于复杂运动目标(如匀速、转弯运动)的状态估计。代码通过三个运动模型(匀速CV、左转弯CT1、右转弯CT2)的协同滤波,动态调整模型概率,最终输出综合跟踪结果。代码包含完整的仿真数据生成、IMM算法实现、结果可视化及误差分析模块。
文章目录
- 视频演示
- 程序讲解
- 核心算法与模型设计
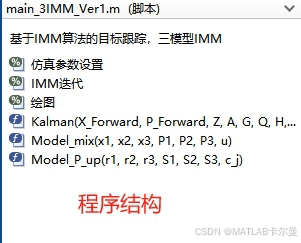
- 代码结构解析
- 运行结果
- MATLAB代码
视频演示
程序讲解
核心算法与模型设计
-
IMM算法框架
- 交互(Mixing):基于模型转移概率矩阵
pij和当前模型概率,计算混合初始状态和协方差。 - 卡尔曼滤波:对每个模型独立进行状态预测与更新,计算残差及协方差。
- 模型概率更新:根据残差似然函数动态调整各模型权重(
Model_P_up函数)。 - 状态综合:加权融合各模型输出,得到最终估计(
Model_mix函数)。
- 交互(Mixing):基于模型转移概率矩阵
-
运动模型
- CV模型(匀速):状态转移矩阵
F1描述线性运动。 - CT1模型(左转):状态转移矩阵
F2含3°/s的左转弯角速度。 - CT2模型(右转):状态转移矩阵
F3含-3°/s的右转弯角速度。
- CV模型(匀速):状态转移矩阵
代码结构解析
-
参数初始化
- 设置仿真时长
time=100,采样间隔T=1s,过程噪声Q和量测噪声R。 - 定义三个模型的状态转移矩阵
F1/F2/F3和量测矩阵H。 - 生成含噪声的仿真数据:目标在20-40秒左转,60-80秒右转,其余时间匀速。
- 设置仿真时长
-
IMM迭代流程
- 初始化:设定初始状态
x0、协方差P0和模型概率u_IMM=[0.3,0.3,0.4]。 - 主循环:依次执行模型交互、卡尔曼滤波、概率更新和状态综合,保存各模型及综合结果。
- 初始化:设定初始状态
-
可视化与分析
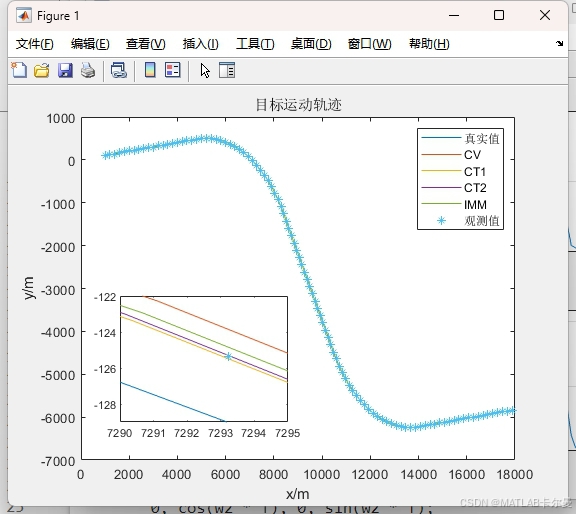
- 轨迹对比:绘制真实轨迹、观测值、各模型及IMM估计轨迹(含局部放大图)。
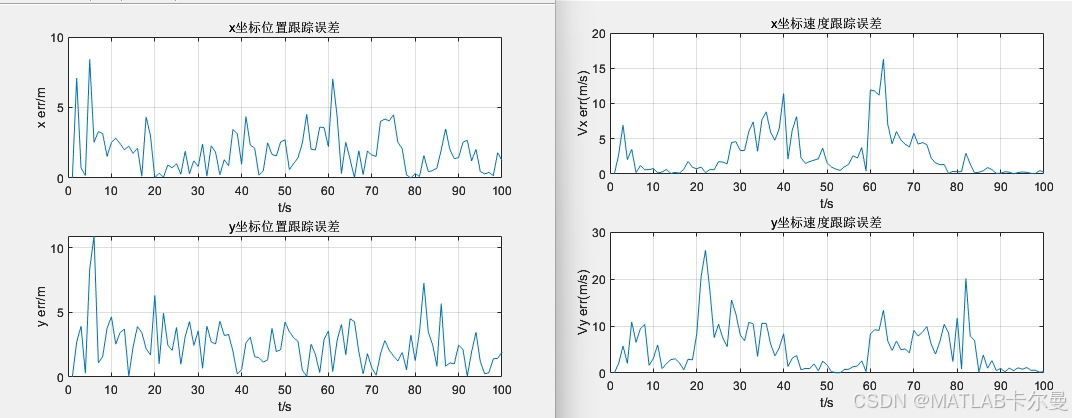
- 误差分析:计算位置和速度误差,展示IMM在x/y方向的跟踪性能。
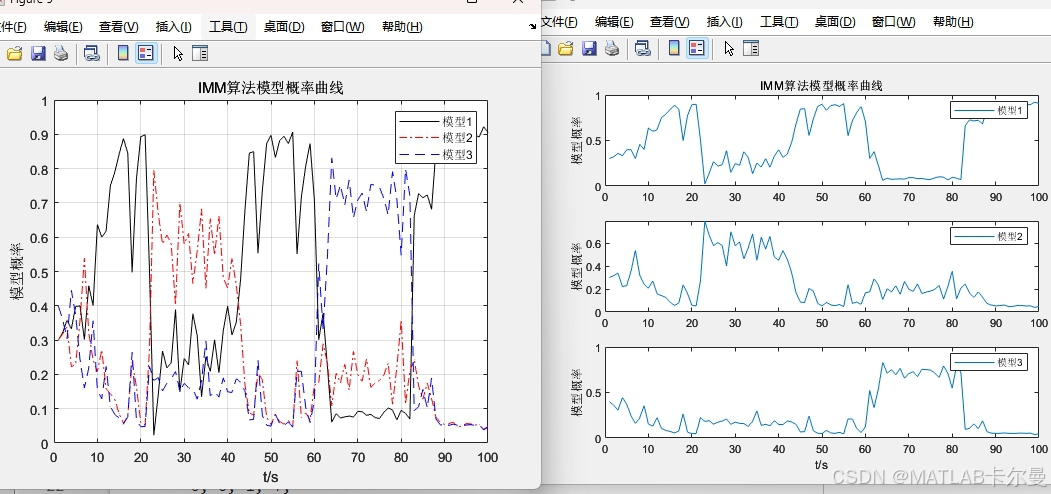
- 模型概率曲线:动态显示各模型概率变化,验证算法对运动模式切换的适应性。
代码结构图示:
运行结果
运动轨迹真值与估计值:
位置和速度误差曲线:
各模型概率误差曲线:
MATLAB代码
部分代码如下:
% 基于IMM算法的目标跟踪,三模型IMM
% 2024-09-21/Ver1
% 2025-03-22/Ver2:修正S_CT1的错误
clc; clear; close all; % 清除命令窗口、工作空间和关闭所有图形窗口
rng('default'); rng(0); % 设置随机数生成器的默认状态,以确保可重复性%% 仿真参数设置
time = 100; % 仿真迭代次数
T = 1; % 采样间隔(时间步长)
w2 = 3 * 2 * pi / 360; % 模型2的转弯率(3度)
w3 = -3 * 2 * pi / 360; % 模型3的转弯率(-3度)
H = [1, 0, 0, 0; % 模型量测矩阵0, 0, 1, 0];
G = [T^2 / 2, 0; % 模型过程噪声加权矩阵T, 0;0, T^2 / 2;0, T];
R = 10 * diag([1, 1]); % 模型量测噪声协方差矩阵
Q = 0.1 * diag([1, 1]); % 模型过程噪声协方差矩阵
F1 = [1, T, 0, 0; % 模型1状态转移矩阵(匀速直线运动)0, 1, 0, 0;0, 0, 1, T;0, 0, 0, 1];
F2 = [1, sin(w2 * T) / w2, 0, (cos(w2 * T) - 1) / w2; % 模型2状态转移矩阵(左转弯)0, cos(w2 * T), 0, sin(w2 * T);0, (1 - cos(w2 * T)) / w2, 1, sin(w2 * T) / w2;0, -sin(w2 * T), 0, cos(w2 * T)];
F3 = [1, sin(w3 * T) / w3, 0, (cos(w3 * T) - 1) / w3; % 模型3状态转移矩阵(右转弯)0, cos(w3 * T), 0, sin(w3 * T);0, (1 - cos(w3 * T)) / w3, 1, sin(w3 * T) / w3;0, -sin(w3 * T), 0, cos(w3 * T)]; x0 = [1000, 200, 100, 20]'; % 初始状态(位置X,速度X,位置Y,速度Y)完整代码的下载链接:https://download.csdn.net/download/callmeup/90565233
如需帮助,或有导航、定位滤波相关的代码定制需求,请点击下方卡片联系作者