惠州做网站 百度优化网站seo如何优化
1.固态激光雷达和机械激光雷达的区别
LOAM、Lego-LOAM、LIO-SAM使用的激光雷达Velodyne都是机械激光雷达。通过机械方式改变扫描方向。通俗点就是一个激光笔放在一个电动机上旋转,激光笔跟着电动机进行360度高速旋转。
工作原理参考:[科普]激光雷达LIDAR工作原理|英飞凌开发者技术社区
固定激光雷达(以livox为例)
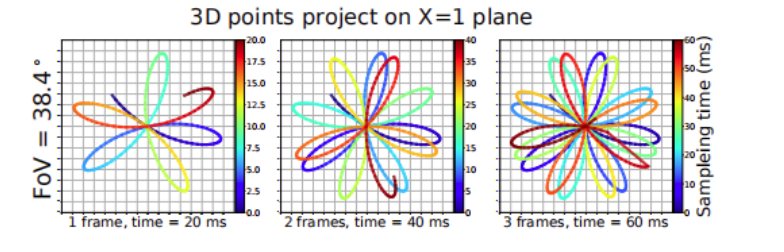
通过阵列干涉或者是mems改变扫描的方向。说白了就是一个激光笔放在那不动,他可以自己改变激光射出的方向。如下就是livox激光线的示意图,“激光笔”是不动的,但是内部有阵列干涉,通过干涉、反射等操作,让“激光笔”发射的点打在不同的位置。如下图,就打出了一个类似雪花的的形状。看下图中的第1张图,蓝色的是起点,红色的终点。
原文链接:https://blog.csdn.net/weixin_40331125/article/details/106136136
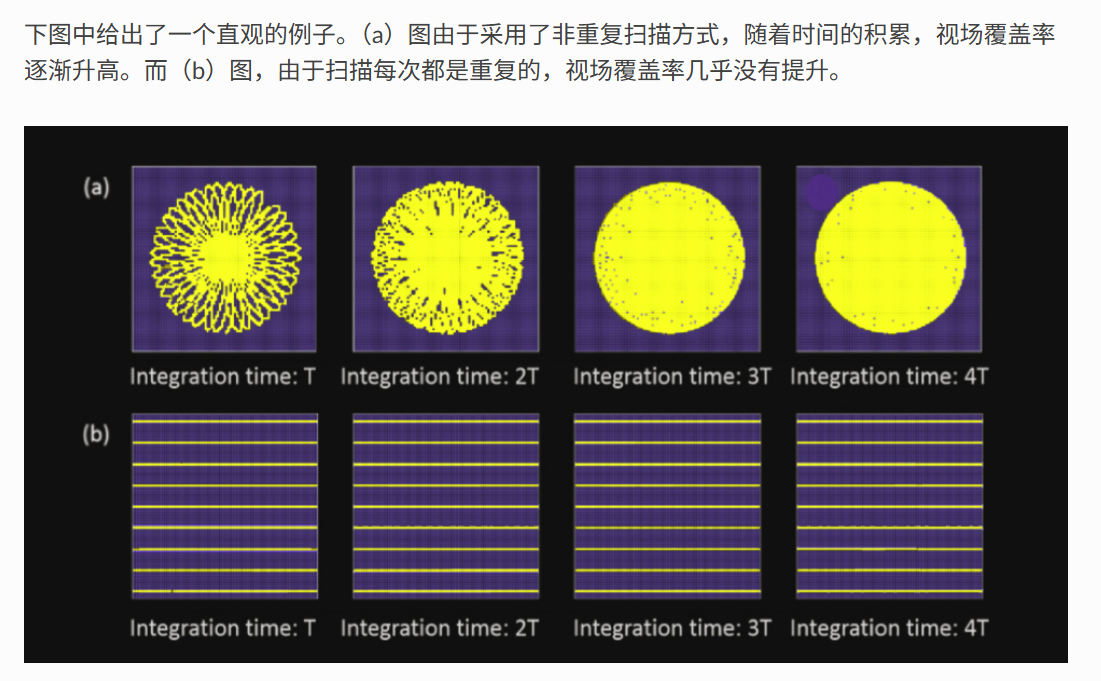
传统激光雷达普遍采用机械扫描方式,扫描路径随时间重复。而Livox 激光雷达采用了独特的扫描⽅式,扫描路径不会重复。在非重复扫描方式中,视场中被激光照射到的区域面积会随时间增大,这意味着视场覆盖率随时间推移而显著提高,可减小视场内物体被漏检的概率,有助于探测视场中的更多细节。
2.LIO-SAM 适配MID360
LIO-SAM支持的激光雷达类型是机械激光雷达,其主要特点是点云数据以线束顺序进行排列,知道每个点在哪个线ring以及该点距离该帧点云起始时刻的时间间隔time,对于角特征和面特征的提取也是利用了这一特点。直接将Livox-Mid-360的点云数据放入LIO-SAM中是无法运行的,它的点云数据格式有三种
// 0 -- Livox pointcloud2(PointXYZRTLT) pointcloud format
float32 x # X axis, unit:m
float32 y # Y axis, unit:m
float32 z # Z axis, unit:m
float32 intensity # the value is reflectivity, 0.0~255.0
uint8 tag # livox tag
uint8 line # laser number in lidar
float64 timestamp # Timestamp of point// 1 -- Livox customized pointcloud format
std_msgs/Header header # ROS standard message header
uint64 timebase # The time of first point
uint32 point_num # Total number of pointclouds
uint8 lidar_id # Lidar device id number
uint8[3] rsvd # Reserved use
CustomPoint[] points # Pointcloud data
// CustomPoint具体的格式如下:
uint32 offset_time # offset time relative to the base time
float32 x # X axis, unit:m
float32 y # Y axis, unit:m
float32 z # Z axis, unit:m
uint8 reflectivity # reflectivity, 0~255
uint8 tag # livox tag
uint8 line # laser number in lidar// 2 -- Standard pointcloud2 (pcl :: PointXYZI) pointcloud format in the PCL library (just for ROS)采用自定义的点云格式,在livox的ROS驱动包中,将Mid-360的点云数据等效于以线束顺序进行排列,这样就可以直接使用LIO-SAM。
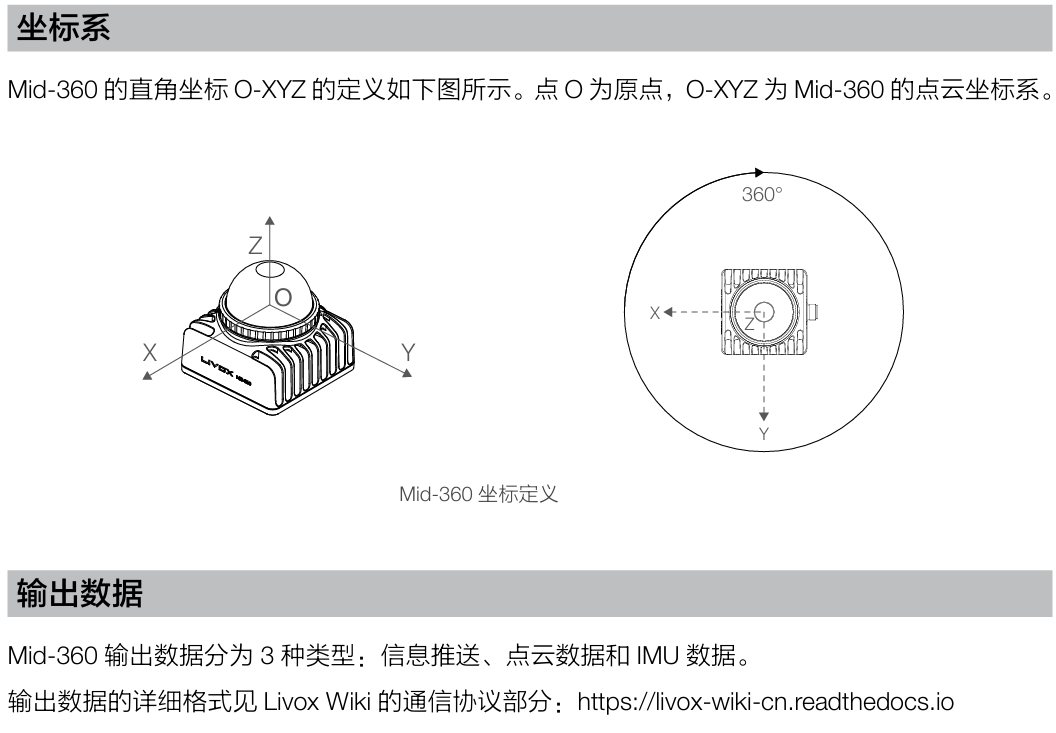
2.1 MID-360坐标系
2.2 代码修改
参考:nkymzsy/LIO-SAM-MID360
代码运行
// MID360是六轴IMU
roslaunch lio_sam run6axis.launch1.配置文件修改
# Sensor Settingssensor: livox # lidar sensor type, 'velodyne' or 'ouster' or 'livox'N_SCAN: 4 # number of lidar channel (i.e., Velodyne/Ouster: 16, 32, 64, 128, Livox Horizon: 6)Horizon_SCAN: 6000 # lidar horizontal resolution (Velodyne:1800, Ouster:512,1024,2048, Livox Horizon: 4000)downsampleRate: 1 # default: 1. Downsample your data if too many points. i.e., 16 = 64 / 4, 16 = 16 / 1lidarMinRange: 1.0 # default: 1.0, minimum lidar range to be usedlidarMaxRange: 40.0 # default: 1000.0, maximum lidar range to be usedmid360相当于4根线的激光雷达
2.MID360自定义数据对应的结构体
struct LiovxPointCustomMsg
{PCL_ADD_POINT4DPCL_ADD_INTENSITY;float time;uint16_t ring;uint16_t tag;EIGEN_MAKE_ALIGNED_OPERATOR_NEW
} EIGEN_ALIGN16;
POINT_CLOUD_REGISTER_POINT_STRUCT (LiovxPointCustomMsg,(float, x, x) (float, y, y) (float, z, z) (float, intensity, intensity) (float, time, time)(uint16_t, ring, ring) (uint16_t, tag, tag)
)
using PointXYZIRT = LiovxPointCustomMsg;// 自定义的点云msg转为PCL点云
for(uint i=0;i<Msg.point_num-1;i++)
{point.x=Msg.points[i].x; point.y=Msg.points[i].y; point.z=Msg.points[i].z; point.intensity=Msg.points[i].reflectivity; point.tag=Msg.points[i].tag; point.time=Msg.points[i].offset_time*1e-9; point.ring=Msg.points[i].line; cloud.push_back(point);
}3.曲率计算不同
//mid360
void calculateSmoothness()
{int cloudSize = extractedCloud->points.size();for (int i = 5; i < cloudSize - 5; i++){float diffRange = cloudInfo.pointRange[i-2] + cloudInfo.pointRange[i-1] - cloudInfo.pointRange[i] * 4+ cloudInfo.pointRange[i+1] + cloudInfo.pointRange[i+2]; cloudCurvature[i] = diffRange*diffRange;//diffX * diffX + diffY * diffY + diffZ * diffZ;cloudNeighborPicked[i] = 0;cloudLabel[i] = 0;// cloudSmoothness for sortingcloudSmoothness[i].value = cloudCurvature[i];cloudSmoothness[i].ind = i;}
}//原代码
void calculateSmoothness()
{int cloudSize = extractedCloud->points.size();for (int i = 5; i < cloudSize - 5; i++){float diffRange = cloudInfo.pointRange[i-5] + cloudInfo.pointRange[i-4]+ cloudInfo.pointRange[i-3] + cloudInfo.pointRange[i-2]+ cloudInfo.pointRange[i-1] - cloudInfo.pointRange[i] * 10+ cloudInfo.pointRange[i+1] + cloudInfo.pointRange[i+2]+ cloudInfo.pointRange[i+3] + cloudInfo.pointRange[i+4]+ cloudInfo.pointRange[i+5]; cloudCurvature[i] = diffRange*diffRange;//diffX * diffX + diffY * diffY + diffZ * diffZ;cloudNeighborPicked[i] = 0;cloudLabel[i] = 0;// cloudSmoothness for sortingcloudSmoothness[i].value = cloudCurvature[i];cloudSmoothness[i].ind = i;}
}疑问
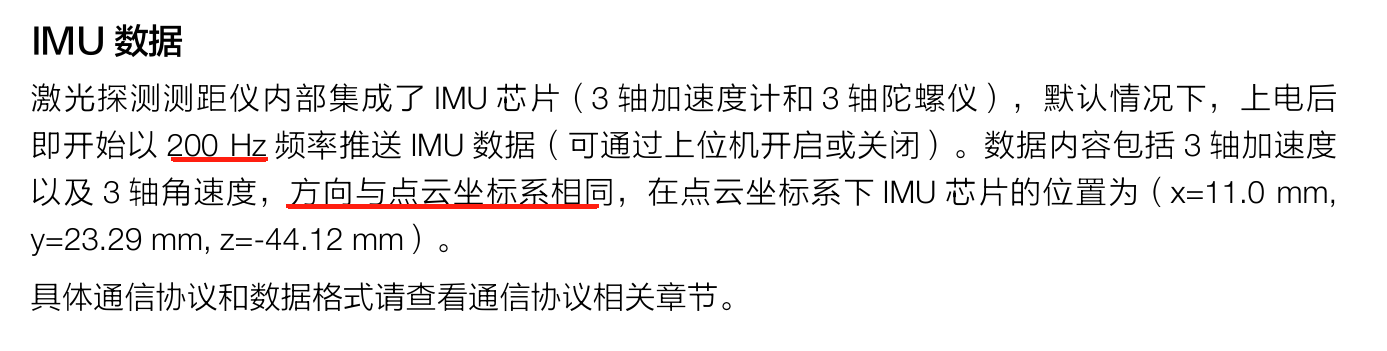
1.对于MID360六轴IMU sensor_msgs::Imu 中有加速度和角速度,orientation中有数据么???
2.六轴IMU不是没有直接测得RPY角么?为什么代码transformUpdate()没有修改呢?
/**用imu原始RPY数据与scan-to-map优化后的位姿进行加权融合,更新当前帧位姿的roll、pitch,约束z坐标
*/
void transformUpdate()