火车头wordpress 4.6网站排名seo教程
1.引言
前两天学一个基于双dq坐标系的六相PMSM驱动控制(考虑中性点隔离以及不隔离的情况,即考虑是否有零序电流回路)。六相PMSM其实和(绕组互差30度)双三相PMSM很像,就想着之间把六相PMSM模型改成双三相PMSM是否可行呢?看了一下相关文献,二者在双dq坐标系下还是有一些差异的。
今天简单搭一个基于双dq坐标系的双三相和六相PMSM进行对比(也就是看看互感对控制性能的影响)。
本篇知乎的参考文献:
[1]李志坚. 对称六相电机驱动系统的相电流优化控制方法研究[D]. 四川:电子科技大学,2024.
[2]梁戈.双三相永磁同步电机优化控制策略与低载波比同步调制技术研究[D].湖南大学,2023.
[3]余开亮.计及谐波空间的双三相永磁同步电机高性能控制技术研究[D].东南大学,2023.
[4]汤昊岳.双三相永磁同步电动机及其驱动系统关键技术的研究[D].北京交通大学,2023.
2.双三相和六相PMSM的差异
2.1绕组分布上的差异[4]
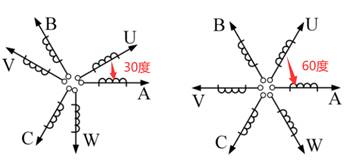
二者的绕组分布示意图如下。左图就是常见的绕组互差30度双三相PMSM,右图则是上篇知乎展示的六相电机。也有不少论文把这两种绕组对应的电机都成为六相电机,一个是绕组相差30度的六相电机,一个是绕组相差60度的六相电机。
2.2双dq坐标系下的不同之处
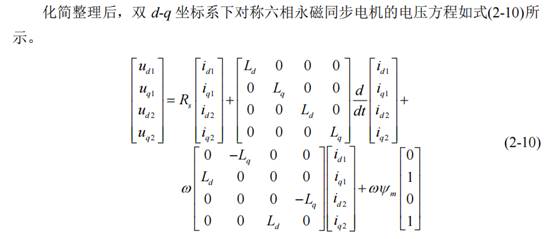
互差60度的六相PMSM在双dq坐标系下是没有明显的电感耦合的,其电气方程如下[1]:
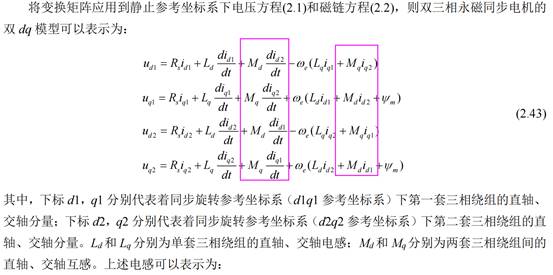
互差30度的双三相PMSM在双dq坐标系下则是由明显的电感耦合的(多了互感Md和Mq),其电气方程如下[2][3][4]:
在互感不大的情况下,电感耦合不怎么会影响电机电流的稳态性能,但是对电机电流的动态控制是有明显影响的。
其次如果双三相永磁同步电机两套三相绕组的互感值较大,则可能导致两个 d-q 平面电流控制不稳定的问题[4]。
这篇知乎就通过仿真展示一下不同互感情况下情况,双三相PMSM和六相PMSM的不同吧。
3.仿真对比
3.1双三相PMSM的仿真搭建
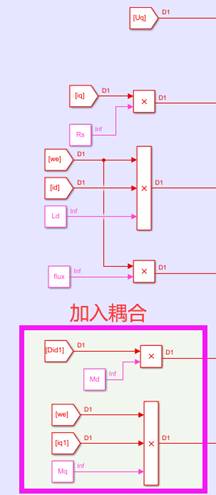
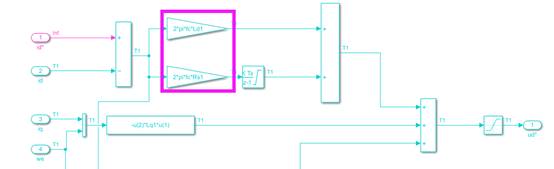
我们要在原有的六相PMSM的基础上加入耦合。下图就展示了电压方程uq2加入耦合后的表达。
3.2仿真参数和工况设置
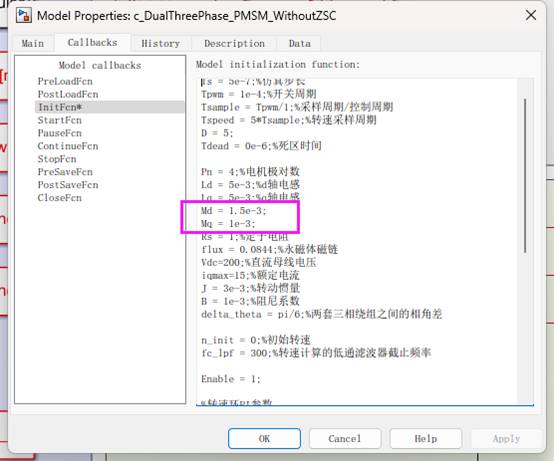
六相PMSM和双三相PMSM我都采用相同的参数,唯独变化的就是双三相PMSM的互感参数(Md,Mq)。
仿真工况:初始电机转速为500r/min,0.25s前的参考转速设置为1500r/min,0.25s后设置为600r/min;0.15s前负载为10Nm,0.15s时突加10Nm负载。
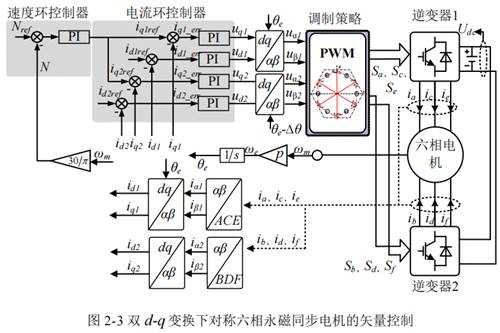
3.3控制框图[1]
六相PMSM和双三相PMSM我都采用相同的控制框图。
3.4仿真的整体展示
先展示整体波形。仿真中共采用三台电机:1.对称六相PMSM,2.双三相PMSM(互感Md=1.5mH,Mq=1mH),3.双三相PMSM(互感Md=4mH,Mq=3.5mH,设得大一点,这样对比会看的明显一点)
从下面三台电机整体波形来看,三者差别并不明显。但仔细去看的话,当互感较大时,第三台电机——双三相PMSM(互感Md=4mH,Mq=3.5mH)在动态阶段出现明显的转矩振荡和过冲。
同时看三台电机整体波形(放大图),第三台电机——双三相PMSM(互感Md=4mH,Mq=3.5mH)的相电流会有一定的毛刺。
对称六相PMSM的整体波形
双三相PMSM(互感Md=1.5mH,Mq=1mH)的整体波形
双三相PMSM(互感Md=4mH,Mq=3.5mH)的整体波形
对称六相PMSM的整体波形(放大图)
双三相PMSM(互感Md=1.5mH,Mq=1mH)的整体波形(放大图)
双三相PMSM(互感Md=4mH,Mq=3.5mH)的整体波形(放大图)
3.5动态过程中的dq电流对比
下面先展示三台电机的dq电流整体波形,再放大相应细节去对比。
对称六相PMSM的dq电流整体波形
双三相PMSM(互感Md=1.5mH,Mq=1mH)的dq电流整体波形
双三相PMSM(互感Md=4mH,Mq=3.5mH)的dq电流整体波形
从下面的dq电流波形(启动阶段的放大图)可以发现:
(1)对于对称六相PMSM,其启动阶段,q轴电流可以有效跟随参考电流,d轴电流可以有效控制为0,基本无波动;
(2)对于双三相PMSM(互感Md=1.5mH,Mq=1mH),其启动阶段,q轴电流可以有效跟随参考电流;但是在q轴电流增大的一瞬间,由于互感的作用,d轴电流反向,出现了负值,但波动不算太大;
(3)对于双三相PMSM(互感Md=4mH,Mq=3.5mH),其启动阶段,dq电流都发生了极为明显的振荡。为了更清楚的展示这一情况,下面还提供了双三相PMSM(互感Md=4mH,Mq=3.5mH)的dq电流波形(启动阶段的细节图)。
对称六相PMSM的dq电流波形(启动阶段的放大图)
双三相PMSM(互感Md=1.5mH,Mq=1mH)的dq电流波形(启动阶段的放大图)
双三相PMSM(互感Md=4mH,Mq=3.5mH)的dq电流波形(启动阶段的放大图)
双三相PMSM(互感Md=4mH,Mq=3.5mH)的dq电流波形(启动阶段的细节图)
3.6不同控制带宽情况下的仿真对比
我仿真里面的PI调节器如下(Kp,Ki都采用带宽配置法,Kp=2*pi*fc*L,Ki=2*pi*fc*Rs,):
我现在打算改变一下控制带宽看着互感对控制性能的影响。前面的控制器fc我设置为400,现在改成100看看。
从下面的波形来看,控制带宽降低之后,互感大的双三相电机出现了极为明显的电流振荡,电机控制性能大幅下降。
对称六相PMSM的dq电流整体波形
双三相PMSM(互感Md=1.5mH,Mq=1mH)的dq电流整体波形
双三相PMSM(互感Md=4mH,Mq=3.5mH)的dq电流整体波形
4.总结
由上述仿真可见,对于双三相电机而言,如果采用双dq坐标系对其进行控制,其效果不算太理想,控制性能会受到电机互感的影响。
所以后续得认真学习VSD坐标系,后面看看采用VSD坐标系对双三相电机进行驱动控制。