外围网站代理怎么做广东省白云区
知识点1【SG90的简述】
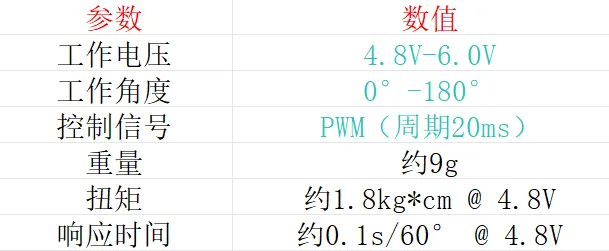
SG90是一款微型舵机(Micro Servo),由TowerPro等厂商提供,广泛用于机器人,舵机云台,舵机控制教学等项目中。
1、基本参数
2、工作原理
SG90内部有电机,齿轮组,电位器和控制板。通过单根线输入(相对舵机)PWM控制信号
3、外观展示

4、接线说明
| 线颜色 | 说明 | 接法说明 |
|---|---|---|
| 棕色 | GND | 接单片机的地线 |
| 红色 | VCC(5V) | 建议接外部5V供电 |
| 橙色 | PWM信号 | 接 STM32 的 PWM 输出引脚 |
知识点2【SG90分类】
SG90有180°舵机和360°舵机
- 需要角度控制 → 选 180° 定位舵机 (Standard SG90)
- 需要可变速度 → 选 360° 连续旋转舵机 (Continuous‑Rotation SG90)
区别如下图:
| 特性 | 180° 定位舵机 | 360° 连续旋转舵机 |
|---|---|---|
| 控制参数意义 | 脉宽→角度 | 脉宽→速度方向 |
| 是否定位 | 是 | 否 |
| 适合应用 | 定点定位、角度扫描 | 速度驱动、轮式驱动 |
| 代码实现区别 | 设置脉宽一次,持续输出; | 持续输出脉宽做速度控制; |
| 停止方式 | 断开 PWM 脉冲 | 脉宽回 1.5 ms 或断开 |
知识点3【180°舵机原理解析】
控制方式:PWM(脉冲宽度调制)
1、舵机通过PWM控制旋转角度
2、通常使用50Hz(周期20ms)的PWM信号。
3、控制信号的高电平时间(脉宽)决定转角,如下图表:
| 脉宽(ms) | 角度(大约值) |
|---|---|
| 0.5 ms | 0° |
| 1.5 ms | 90° |
| 2.5 ms | 180° |
知识点4【360°舵机原理解析】
工作流程:
- 接收同样的 50 Hz PWM 脉冲
- 驱动电路不再做角度锁定,而是将脉宽映射为“速度与方向”控制
- 输出轴持续旋转,直到 PWM 脉冲停止或脉宽回到中立值
| 脉宽 | 旋转方向与速度 |
|---|---|
| < 1.5 ms | 反向旋转,脉宽越短速度越快 |
| ≈ 1.5 ms | 停止(无转矩输出) |
| > 1.5 ms | 正向旋转,脉宽越长速度越快 |
知识点5【注意事项】
1、电源要求
SG90的推荐工作电压时5V,不要直接使用STM32板的3.3V供电,否则容易抖动,或不工作。
2、不要强行转动舵机输出轴
容易破坏内部齿轮或位置反馈电位器。
知识点4【代码演示】
我是用的是STM32F10x系列的,TIM2CH1。
main.c
#include "stm32f10x.h"
#include "stm32f10x_conf.h"
#include "usart.h"
#include "tim.h"int main(void)
{//有限级组的配置NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);TIM2_CH1_Init();TIM2_CH1_GPIO_Init();Usart1_Init(9600);TIM3_Init();while(1){ }
}tim.c
#include "tim.h"
#define MAX_SPEED 60.0f
const u16 period = 1000;
u16 pulse = 0;
int speed = 0;
int state = 30;
void TIM2_CH1_Init(void)
{TIM_TimeBaseInitTypeDef TIM2_TimeBaseStruct;TIM_OCInitTypeDef TIM2_OCStruct;NVIC_InitTypeDef NVIC_TIM2Struct;RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2,ENABLE);TIM_TimeBaseStructInit(&TIM2_TimeBaseStruct);TIM2_TimeBaseStruct.TIM_ClockDivision = TIM_CKD_DIV1;TIM2_TimeBaseStruct.TIM_CounterMode = TIM_CounterMode_Up;TIM2_TimeBaseStruct.TIM_Period = period - 1;TIM2_TimeBaseStruct.TIM_Prescaler = 1440 - 1;TIM2_TimeBaseStruct.TIM_RepetitionCounter = 0;TIM_TimeBaseInit(TIM2,&TIM2_TimeBaseStruct);pulse = speed * (2/180) *50 + 25;TIM_OCStructInit(&TIM2_OCStruct);TIM2_OCStruct.TIM_OCMode = TIM_OCMode_PWM1;TIM2_OCStruct.TIM_OCPolarity = TIM_OCPolarity_High;TIM2_OCStruct.TIM_OutputState = TIM_OutputState_Enable;TIM2_OCStruct.TIM_Pulse = pulse;TIM_OC1Init(TIM2,&TIM2_OCStruct);TIM_Cmd(TIM2,ENABLE);
}void TIM3_Init(void)
{TIM_TimeBaseInitTypeDef TIM3_TimeBaseStruct;NVIC_InitTypeDef NVIC_TIM3Struct;RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3,ENABLE);TIM_TimeBaseStructInit(&TIM3_TimeBaseStruct);TIM3_TimeBaseStruct.TIM_ClockDivision = TIM_CKD_DIV1;TIM3_TimeBaseStruct.TIM_CounterMode = TIM_CounterMode_Up;TIM3_TimeBaseStruct.TIM_Period = 20000 - 1;TIM3_TimeBaseStruct.TIM_Prescaler = 7200 - 1;TIM3_TimeBaseStruct.TIM_RepetitionCounter = 0;TIM_TimeBaseInit(TIM3,&TIM3_TimeBaseStruct);NVIC_TIM3Struct.NVIC_IRQChannel = TIM3_IRQn;NVIC_TIM3Struct.NVIC_IRQChannelCmd = ENABLE;NVIC_TIM3Struct.NVIC_IRQChannelPreemptionPriority = 1;NVIC_TIM3Struct.NVIC_IRQChannelSubPriority = 1;NVIC_Init(&NVIC_TIM3Struct);TIM_ITConfig(TIM3,TIM_IT_Update,ENABLE);TIM_Cmd(TIM3,ENABLE);
}void TIM2_CH1_GPIO_Init(void)
{GPIO_InitTypeDef GPIOA_InitStruct;RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);GPIO_StructInit(&GPIOA_InitStruct);GPIOA_InitStruct.GPIO_Speed = GPIO_Speed_50MHz;GPIOA_InitStruct.GPIO_Pin = GPIO_Pin_0;GPIOA_InitStruct.GPIO_Mode = GPIO_Mode_AF_PP;GPIO_Init(GPIOA,&GPIOA_InitStruct);
}void TIM3_IRQHandler(void)
{if(TIM_GetITStatus(TIM3,TIM_IT_Update) == SET){TIM_ClearITPendingBit(TIM3,TIM_IT_Update);speed += state;if(speed >= 60){state = -30;}else if(speed <= -60){state = 30;}//角度处理pulse = (u16)(speed * (1.0f/20) *(period / MAX_SPEED) + 1.5f / 20 * 1000);printf("Speed:%d r/s\\n",speed);TIM_SetCompare1(TIM2,pulse);}
}usart.c
//串口1初始化
void Usart1_Init(u32 Baud)
{GPIO_InitTypeDef GPIOB_InitStruct;USART_InitTypeDef USART1_InitStruct;//时钟配置 USART1,TX:PA9,RX:PA10RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1,ENABLE);RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);//端口配置GPIOB_InitStruct.GPIO_Mode = GPIO_Mode_AF_PP;GPIOB_InitStruct.GPIO_Pin = GPIO_Pin_9;GPIOB_InitStruct.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOA,&GPIOB_InitStruct);GPIOB_InitStruct.GPIO_Pin = GPIO_Pin_10;GPIOB_InitStruct.GPIO_Mode = GPIO_Mode_IN_FLOATING;GPIO_Init(GPIOA,&GPIOB_InitStruct);//串口初始化USART1_InitStruct.USART_BaudRate = Baud;USART1_InitStruct.USART_HardwareFlowControl = USART_HardwareFlowControl_None;USART1_InitStruct.USART_Mode = USART_Mode_Tx | USART_Mode_Rx;USART1_InitStruct.USART_Parity = USART_Parity_No;USART1_InitStruct.USART_StopBits = USART_StopBits_1;USART1_InitStruct.USART_WordLength = USART_WordLength_8b;USART_Init(USART1,&USART1_InitStruct);//使能串口USART_Cmd(USART1,ENABLE);
}//串口1发送数据函数发送数据
void USART1_Trans(u8 c)
{while(USART_GetFlagStatus(USART1,USART_FLAG_TXE) == RESET);USART_SendData(USART1,c);while(USART_GetFlagStatus(USART1,USART_FLAG_TC) == RESET);
}int fputc(int c,FILE *stream)
{USART1_Trans((u8)c);return c;
}
代码运行结果

结束
代码重在练习!
代码重在练习!
代码重在练习!
今天的分享就到此结束了,希望对你有所帮助,如果你喜欢我的分享,请点赞收藏加关注,谢谢大家!!!