游戏优化是什么意思昆明百度搜索排名优化
文章目录
- 前言
- 环境配置
- 运行测试
- 报错
前言
YOLO机械臂仿真是一种结合了YOLO(You Only Look Once)目标检测算法与机械臂控制的智能化仿真系统。该系统通过YOLO实时检测环境中的目标物体,并结合机械臂的运动规划与仿真,实现自动化的抓取、分拣、装配等任务。该应用广泛应用于工业自动化、智能仓储、机器人教育等领域,为机械臂的智能化操作提供了高效、精准的解决方案。
在仿真环境中,YOLO算法能够快速识别目标物体的位置和类别,并将这些信息传递给机械臂控制系统。机械臂根据目标的位置和姿态,自动规划运动路径,完成抓取或操作任务。通过仿真平台(如Gazebo、CoppeliaSim或PyBullet),用户可以在虚拟环境中测试和优化机械臂的控制算法,降低实际部署中的风险和成本。
YOLO机械臂仿真的优势在于其高效的目标检测能力和实时性,能够适应动态环境中的多目标场景。同时,仿真平台提供了高度可控的实验环境,便于开发者调试算法、优化性能,并快速验证机械臂的工作效果。
code: https://github.com/laoxue888/moveit2_yolobb_ws
参考:
- Pick and Place Simulation Using MoveIt and Yolov8 OBB
- https://drive.google.com/drive/folders/1eDVATIX1mHBtSkI7ueQE2568mkxgno0f
环境配置
docker run -it -p 6796:22 -v /tmp/.X11-unix:/tmp/.X11-unix -e DISPLAY=host.docker.internal:0.0 --gpus=all --name=ros2_learn6 docker.1ms.run/ubuntu:24.04 /bin/bash
apt-get update
apt install wget -ywget http://fishros.com/install -O fishros && bash fishros# 安装gz
sudo apt-get update
sudo apt-get install curl lsb-release gnupg -y
sudo curl https://packages.osrfoundation.org/gazebo.gpg --output /usr/share/keyrings/pkgs-osrf-archive-keyring.gpg
echo "deb [arch=$(dpkg --print-architecture) signed-by=/usr/share/keyrings/pkgs-osrf-archive-keyring.gpg] http://packages.osrfoundation.org/gazebo/ubuntu-stable $(lsb_release -cs) main" | sudo tee /etc/apt/sources.list.d/gazebo-stable.list > /dev/null
sudo apt-get update -y
sudo apt-get install gz-harmonic -yapt-get install x11-xserver-utils
apt install libxcb* -y# New terminal
apt install ros-${ROS_DISTRO}-moveit* -y# sudo apt-get update
# sudo apt-get install -y ros-${ROS_DISTRO}-rmw-cyclonedds-cpp
# export RMW_IMPLEMENTATION=rmw_cyclonedds_cpp
# export LIBGL_ALWAYS_SOFTWARE=1
# export GZ_SIM_SYSTEM_PLUGIN_PATH=/opt/ros/${ROS_DISTRO}/lib/
# # sudo apt install ros-${ROS_DISTRO}-gazebo-ros-pkgs ros-${ROS_DISTRO}-gazebo-ros2-control -ysudo apt install ros-${ROS_DISTRO}-controller-manager -y
sudo apt install ros-${ROS_DISTRO}-joint-trajectory-controller -y
sudo apt install ros-${ROS_DISTRO}-joint-state-broadcaster -y
sudo apt install ros-${ROS_DISTRO}-diff-drive-controller -yapt install ros-${ROS_DISTRO}-ros-gz -y
apt-get install ros-${ROS_DISTRO}-joint-state-publisher-gui -y
apt install ros-${ROS_DISTRO}-moveit-ros-planning-interface -y
# apt install ros-jazzy-gz-ros2-control 这个很重要 https://github.com/ros-controls/gz_ros2_control
apt install ros-${ROS_DISTRO}-gz-ros2-control -y# 用于调试
apt-get install gdb -y# python
apt install python3-pip -ypip config set global.index-url https://pypi.tuna.tsinghua.edu.cn/simple
# pip install pyside6 xacro ultralytics --break-system-packages
pip install pyside6 xacro ultralytics NodeGraphQt --break-system-packages
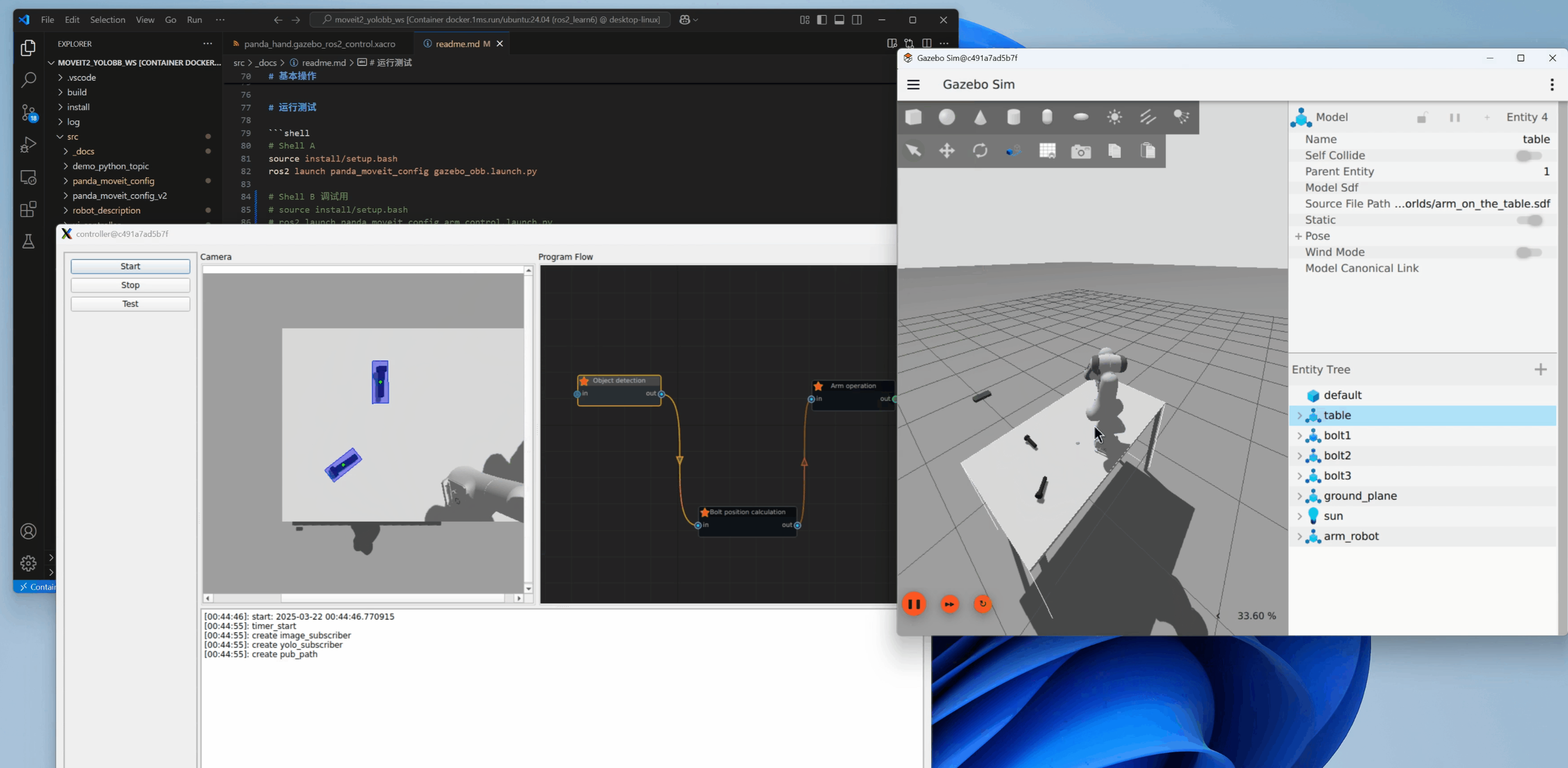
pip install -U colcon-common-extensions vcstool --break-system-packages运行测试
# Shell A
source install/setup.bash
ros2 launch panda_moveit_config gazebo_obb.launch.py# Shell B 调试用
# source install/setup.bash
# ros2 launch panda_moveit_config arm_control.launch.py# Shell C
source install/setup.bash
ros2 launch yolov8_obb yolov8_obb.launch.py# Shell D
source install/setup.bash
cd src/ui_controller/
python3 main.py
【代码】基于ros2与moveit2开发的yolo识别抓取虚拟机械臂
报错
❌
[move_group-3] [ERROR] [1742286584.537923487] [move_group.moveit.moveit.core.time_optimal_trajectory_generation]: No acceleration limit was defined for joint panda_joint1! You have to define acceleration limits in the URDF or joint_limits.yaml
✔️
设置好加速度

❌
[move_group-3] [ERROR] [1742286725.635634628] [move_group.moveit.moveit.ros.trajectory_execution_manager]: Unable to identify any set of controllers that can actuate the specified joints: [ panda_joint1 panda_joint2 panda_joint3 panda_joint4 panda_joint5 panda_joint6 panda_joint7 ]
[move_group-3] [ERROR] [1742286725.635688171] [move_group.moveit.moveit.ros.trajectory_execution_manager]: Known controllers and their joints:
[move_group-3]
[move_group-3] [ERROR] [1742286725.635703240] [move_group.moveit.moveit.ros.plan_execution]: Apparently trajectory initialization failed
[move_group-3] [INFO] [1742286725.635767383] [move_group.moveit.moveit.ros.move_group.move_action]: CONTROL_FAILED
[rviz2-4] [INFO] [1742286725.636182552] [moveit_2565687607.moveit.ros.move_group_interface]: Plan and Execute request aborted
[rviz2-4] [ERROR] [1742286725.637270976] [moveit_2565687607.moveit.ros.move_group_interface]: MoveGroupInterface::move() failed or timeout reached
✔️

action_ns: follow_joint_trajectory
default: true