文献笔记 - Analysis of Ground Effect for Small-Scale UAVs in Forward Flight
Abstract—The letter investigates how the behavior of small-scale unmanned aerial vehicles (UAVs) is influenced by the system’s close proximity to the ground/rigid surfaces both at hover and in forward flight. We perform an extensive experimental study where a quadrotor is tasked with flying in forward velocities in the range of 0–8 m/s and at altitudes that range between 0.05–0.5 m. Experimental data are used to evaluate four existing ground effect models. Results suggest that existing models for helicopters and in-hover multi-rotors cannot fully describe the forward motion of a quadrotor when it operates close to ground.We introduce two new data-driven models for rotorcraft operating in ground effect both at hover and in forward flight, and evaluate the proposed models with another quadrotor of different size. The proposed models simultaneously consider several operating conditions, which are parameterized by the vehicle’s forward velocity and altitude. The models link the thrust produced when operating in ground effect and hovering out of ground effect as forward velocities vary. This information can be incorporated into flight controllers for robust and adaptive UAV flights, and can benefit motion planners for safe and energy efficient near-ground trajectory planning.
摘要——这封信调查了小型无人机(UAV)在悬停和向前飞行时,系统与地面/刚性表面的接近程度如何影响其行为。我们进行了一项广泛的实验研究,其中四旋翼飞行器的任务是以0-8m/s的速度和0.05-0.5m的高度飞行。实验数据用于评估四种现有的地面效应模型。结果表明,现有的直升机和悬停多旋翼模型无法完全描述四旋翼在靠近地面运行时的前进运动。我们介绍了两种新的数据驱动模型,用于旋翼机在悬停和前飞时在地面效应下运行,并用另一种不同尺寸的四旋翼机对提出的模型进行了评估。所提出的模型同时考虑了多种操作条件,这些条件由车辆的前进速度和高度参数化。这些模型将在地面效应下运行时产生的推力与在地面效应外悬停时随着前进速度的变化而产生的推力联系起来。这些信息可以整合到飞行控制器中,用于鲁棒和自适应的无人机飞行,并有利于运动规划者进行安全和节能的近地轨迹规划。
I. INTRODUCTION
The capability to predict the behavior ofsmall-scale UAVs both at hover and in forward flight when operating close to ground can help design more efficient motion planners and controllers for autonomous UAV operation in cluttered environments.
Similar to other aerodynamic effects [5], [6], ground effect can be taken into consideration to generate near-ground energy efficient trajectories. Operating in ground effect (IGE) can be more energy efficient than operating out of ground effect (OGE) in terms of lift-to-drag ratio [7]. The higher the ratio, the more efficient the vehicle is. In steady-state flight, lift balances the vehicle’s weight. However, as the vehicle moves forward, the amount of lift produced decreases due to trailing vortices. When the aircraft operates near ground, the ground alters the airflow and partially blocks the trailing vortices [7]. As such, more lift, as well as less induced drag, is generated, and therefore, less thrust is required in order to balance the drag and maintain a desired forward velocity [7].
与其他空气动力学效应[5]、[6]类似,可以考虑地面效应来生成近地节能轨迹。在升阻比方面,地面效应(IGE)运行比地面效应(OGE)运行更节能[7]。比率越高,飞行器的效率就越高。在稳态飞行中,升力平衡了飞行器的重量。然而,随着车辆向前行驶,由于尾部涡流,产生的升力量会减少。当飞机在近地运行时,地面会改变气流并部分阻挡尾部涡流[7]。因此,产生了更多的升力和更少的诱导阻力,因此,需要更少的推力来平衡阻力并保持所需的前进速度[7]。
For energy-aware motion planning, minimum-energy paths can be found with respect to motor angular velocities [8], [9], since required power and thrust have been found to scale proportionally with the cube and square of angular velocity, respectively [7], [10], [11]. Hence,one can command the vehicle to operate close to a rigid surface at a feasible forward velocity to consume less energy. To this end, it is important to study the relationship between forward velocity,distance from the ground, and corresponding required thrust, in order to understand the power consumption in ground effect.
对于能量感知运动规划,可以找到与电机角速度相关的最小能量路径[8],[9],因为已经发现所需的功率和推力分别与角速度的立方和平方成比例[7],[10],[11]。因此,可以命令车辆以可行的前进速度在刚性表面附近运行,以消耗更少的能量。为此,研究前进速度、离地距离和相应所需推力之间的关系非常重要,以便了解地面效应的功耗。
Besides energetic gains on robotic flight,better understanding of ground effect both at hover and in forward flight can provide useful information for robot motion planning and control. Accurate models for ground effect in forward flight, when linked to a robot’s characteristic length (e.g., the propeller radius), can indicate safe distances for vehicles to keep not only from the ground, but also from other vehicles in multi-robot teams (e.g., [12], [13]). This information is important when developing robust and adaptive controllers for applications like autonomous landing [14], perching [15], and high-speed flight in confined spaces [16].
除了机器人飞行的能量增益外,更好地理解悬停和前飞时的地面效应可以为机器人运动规划和控制提供有用的信息。当与机器人的特征长度(如螺旋桨半径)相关联时,前飞中地面效应的精确模型可以指示车辆不仅要与地面保持安全距离,还要与多机器人团队中的其他车辆保持安全距离(如[12]、[13])。在为自主着陆[14]、栖息[15]和密闭空间中的高速飞行[16]等应用开发鲁棒和自适应控制器时,这些信息非常重要。
Our work improves the understanding of how proximity to the ground affects the behavior of small-scale rotorcraft UAVs across operating conditions in terms of altitude and forward velocity. This is the first study that captures ground effects through extensive indoor experimentation across several altitudes (0.05−0.5 m) and forward velocities (0−8 m/s). Data are used to evaluate existing models in the literature, and to help derive new ones that are amenable to control. Existing models are found insufficient to accurately capture ground effect in forward flight. To address this gap, our proposed models blend data-driven methods with non-dimensional analysis. The proposed models’ structure brings forward clear and intuitive relations between key robot characteristics (rotor induced velocity at hover and propeller radius), and important physical operation quantities(forward velocity and altitude).The models’ generalization capability is evaluated with data from another quadrotor of different frame size and mass.
我们的工作提高了人们对接近地面如何影响小型旋翼无人机在高度和前进速度方面在各种操作条件下的行为的理解。这是第一项通过在几个高度(0.05-0.5米)和前进速度(0-8米/秒)进行广泛的室内实验来捕捉地面效应的研究。数据用于评估文献中的现有模型,并帮助推导出易于控制的新模型。发现现有模型不足以准确捕捉前飞中的地面效应。为了解决这一差距,我们提出的模型将数据驱动方法与无量纲分析相结合。所提出的模型结构提出了关键机器人特征(悬停时的转子诱导速度和螺旋桨半径)与重要物理操作量(前进速度和高度)之间清晰直观的关系。模型的泛化能力是通过来自另一个不同帧大小和质量的四旋翼机的数据来评估的。
II. BACKGROUND
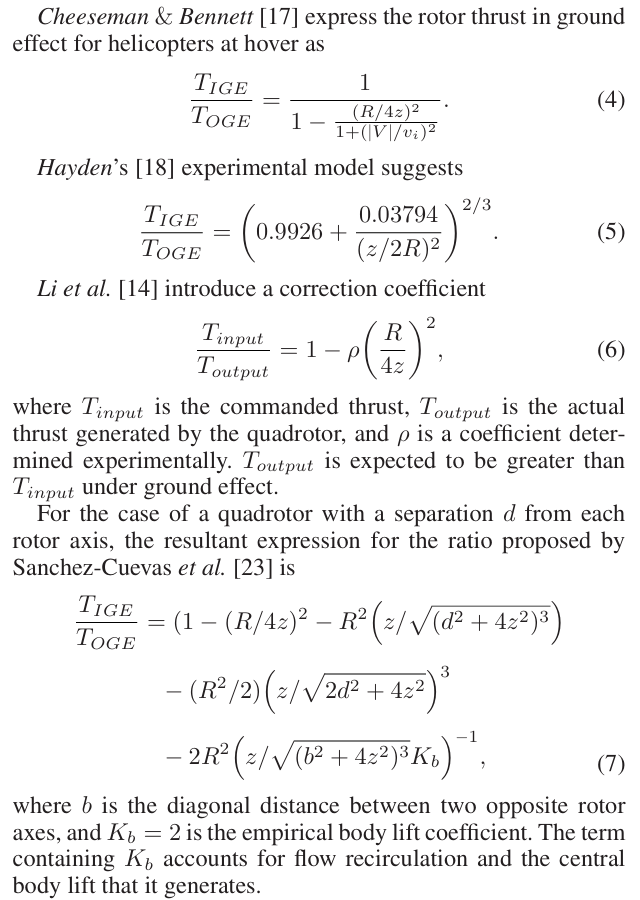
Ground effect for conventional helicopters at hover has been studied extensively. When hovering close to ground, rotor thrust increases at constant power. Cheeseman & Bennett [17] proposed an analytical model using the method of images. Hayden [18] identified the influence of ground effect at hover from experimental observations. Both models relate the thrust generated by a single propeller to the distance from the ground.
传统直升机悬停时的地面效应已经得到了广泛的研究。当靠近地面悬停时,旋翼推力以恒定功率增加。Cheeseman和Bennett[17]提出了一种使用图像方法的分析模型。Hayden[18]从实验观测中确定了悬停时地面效应的影响。这两个模型都将单个螺旋桨产生的推力与离地距离联系起来。
The presence of multiple rotors may lead to behaviors that cannot be captured by single-rotor models. Related work [19] [21] has evaluated single-rotor models for ground effect using quadrotors, and demonstrated the existence of ground effect at higher altitudes than predicted analytically [17]. One possible explanation is the strong flow interactions between multiple rotors [22]. Thus, models for single-rotor vehicles cannot be applied directly to multi-rotor ones.
多个转子的存在可能会导致单转子模型无法捕捉到的行为。相关工作[19][21]评估了使用四旋翼的单旋翼地面效应模型,并证明了在比分析预测更高的高度存在地面效应[17]。一种可能的解释是多个转子之间的强流动相互作用[22]。因此,单旋翼飞行器的模型不能直接应用于多旋翼飞行器。
Recent efforts seek to understand the impact of ground effect in small-scale quadrotors. Li et al. [14] presented an improved model to compensate for the increase of thrust in ground ef fect under constant power, and experimentally demonstrated its efficacy within an altitude controller for autonomous landing. Sanchez-Cuevas et al. [23] further considered the influence of rotor placements, flow recirculation, and the central body lift. Models of ground effect for a hovering quadrotor can also be derived through data-driven methods [24] based on the principal orthogonal decomposition (POD) [25] or appropriate low dimensional stochastic modeling [26]. However, these models apply to hover, and quantify ground effect as a function of altitude. Integrating forward velocity remains a challenge.
最近的努力试图了解地面效应对小型四旋翼机的影响。Li等人[14]提出了一种改进的模型,以补偿恒定功率下地面效应中推力的增加,并通过实验证明了其在自主着陆高度控制器中的有效性。Sanchez-Cuevas等人[23]进一步考虑了转子位置、流动再循环和中心体升力的影响。悬停四旋翼飞行器的地面效应模型也可以通过基于主正交分解(POD)的数据驱动方法[24]或适当的低维随机建模[26]得出。然而,这些模型适用于悬停,并将地面效应量化为高度的函数。整合前进速度仍然是一个挑战。
In forward flight, ground effects are more complex because of the complicated flow states near the rotor. With a forward velocity, a region of flow recirculation upstream of the rotor is formed, which influences the required power as the forward velocity changes. Hence, rotor performance in ground effect tends to differ between low and high forward velocity. Multiple models have been developed to simulate the flow near rotors [19], [27]–[30]. However,when comparing with experimental results, these models are inadequate to predict in-ground-effect rotor performance for small-scale quadrotors in forward flight. The present letter fills this gap.
在前进飞行中,由于旋翼附近的复杂流动状态,地面效应更加复杂。在前进速度下,转子上游形成了一个流动再循环区域,随着前进速度的变化,该区域会影响所需的功率。因此,在低和高前进速度下,地面效应下的转子性能往往不同。已经开发了多个模型来模拟转子附近的流动[19],[27]–[30]。然而,与实验结果相比,这些模型不足以预测小型四旋翼在前飞时的地面效应转子性能。本函填补了这一空白。
III. DATA COLLECTION AND ANALYSIS
We collect data from two distinct quadrotor UAVs (Fig. 1). The first dataset is from an AscTec Hummingbird,which is used to evaluate existing models and to train our proposed models. The second dataset is from a Bitcraze Crazyflie2.0 which is used to validate our proposed models. Both vehicles are commanded to follow pre-planned trajectories. Flight altitude, forward velocity, and 3D position and orientation are measured at 100 Hz via motion capture.IMU measurements,rotor RPM(for Hummingbird), and motor power consumption (for Crazyflie) are recorded through the vehicles’ firmware. For Hummingbird, thrust is computed directly from rotor RPM [31]. For Crazyflie, thrust is converted from motor power consumption via the manufacturer’s power-thrust curves.
我们从两种不同的四旋翼无人机收集数据(图1)。第一个数据集来自AscTec蜂鸟,用于评估现有模型和训练我们提出的模型。第二个数据集来自Bitcraze Crazyflie2.0,用于验证我们提出的模型。两辆车都被命令遵循预先计划的轨迹。飞行高度、前进速度以及3D位置和方向通过运动捕捉以100 Hz的频率进行测量。IMU测量值、转子转速(适用于蜂鸟)和电机功耗(适用于Crazyflie)通过车辆固件记录。对于蜂鸟,推力直接根据转子转速计算[31]。对于Crazyflie来说,推力是通过制造商的功率-推力曲线从电机功耗转换而来的。
A. Experimental Setup
1) Hummingbird Dataset: Experiments with AscTec Hummingbird are conducted in an 27 m L × 6.7 m W × 4.6 m H indoor robot testing area. The propeller radius is R =0.1 m. The total mass is m =0.551 kg. We consider eleven distinct forward velocities (V ∈{0,0.5,1,1.5,2,3,4,5,6,7,8} m/s ; V =0m/scorresponds to hover), and eight IGE altitudes (z ∈ {0.05,0.1,0.15,0.2,0.25,0.3,0.4,0.5} m).1 A PD controller is used to track desired trajectories. To avoid crashing to the ground at high speeds due to large attitude, we remove altitudes lower than 0.1 m, 0.15 m, and 0.2 m from 6 m/s, 7 m/s, and 8 m/s flights, respectively. This leads to a total of 82 distinct case studies. For each case study, we collect 20 experimental trials. To account for variations that may exist (e.g., due to noise) but are hard to model and/or predict, we first perform variance reduction by averaging over the temporal duration of a constant velocity trajectory segment ineachtrial, and thenaveragingover all trials for each case study. The outcome is then used to train the proposed models.
1) 蜂鸟数据集:AscTec蜂鸟实验在27米长×6.7米宽×4.6米高的室内机器人测试区进行。螺旋桨半径为R=0.1 m。总质量为m=0.551 kg。我们考虑了
11个不同的前进速度(V∈{0,0.5,1,1.5,2,3,4,5,6,7,8}m/s;V=0m/悬停响应)和
8个IGE高度(z∈{0.05,0.1,0.15,0.2,0.25,0.3,0.4,0.5}m)。1使用PD控制器来跟踪所需的轨迹。为了避免因大姿态而高速撞击地面,我们分别从6米/秒、7米/秒和8米/秒的飞行中删除了低于0.1米、0.15米和0.2米的高度。这导致了总共82个不同的案例研究。对于每个案例研究,我们收集了20个实验试验。为了解释可能存在但难以建模和/或预测的变化(例如,由于噪声),我们首先通过在每个试验中对恒速轨迹段的持续时间进行平均来进行方差降低,然后对每个案例研究的所有试验进行平均。然后将结果用于训练所提出的模型。
We generate minimum-snap energy efficient trajectories [31], [32] (Fig. 2) for Hummingbird. Each trajectory is designed to have two key segments, an IGE and an OGEsegment. We maximize the duration of constant velocity segments while adhering to workspace restrictions, which requires large accelerations at the beginning and at the end of each segment. However, large accelerations are difficult to achieve since they require large attitude changes, which could result in the arms of the robot contacting the ground. To mitigate this, when entering and exiting the IGE segments, the robot starts higher than the nominal IGE height and descends while accelerating laterally. In Fig. 2, starting from position 1 , the vehicle accelerates to reach the desired velocity V and height z at position 2 . Then, the vehicle moves forward in a straight line from position 2 to 3 at constant velocity V and constant height z. From position 3 , the vehicle starts to decelerate and rest at position 4 . Later on, the vehicle follows similar process along positions 4 , 5 , 6 , 1 , with height at 5 and 6 being set at z =1m. The ground effect can be significant up to 5R above the ground for multi-rotor vehicles [19]–[21]. The return trajectory at z =1m satisfies the OGE condition.
我们为蜂鸟生成了最小快速节能轨迹[31],[32](图2)。每个轨迹都设计有两个关键段,一个IGE段和一个OGE段。我们在遵守工作空间限制的同时,最大限度地延长了恒速段的持续时间,这要求在每个段的开始和结束时都有较大的加速度。然而,大的加速度很难实现,因为它们需要大的姿态变化,这可能会导致机器人的手臂接触地面。为了减轻这种情况,当进入和离开IGE段时,机器人开始时高于标称IGE高度,并在横向加速的同时下降。在图2中,车辆从位置1开始加速,在位置2达到所需的速度V和高度z。然后,车辆以恒定速度V和恒定高度z从位置2直线前进到位置3。从位置3开始,车辆开始减速并停在位置4。随后,车辆沿着位置4、5、6、1遵循类似的过程,其中5和6的高度设置为z=1m。对于多旋翼飞行器,地面效应在离地面5R处可能很显著[19]-[21]。z=1m处的返回轨迹满足OGE条件。
2) Crazyflie Dataset: Experiments with a Crazyflie are con ducted in a different, 7 m L × 5.5 m W × 3 m H indoor robot testing area. The propeller radius is R =0.023m.The total mass of the vehicle is m =0.032 kg.
As the size of Crazyflie is much smaller compared with Hummingbird, it is reasonable to non-dimensionalize the commanded altitude and forward velocity. Doing so facilitates more direct comparisons between the two robots. We use two non dimensional quantities:
1) the ratio of altitude to propeller radius, that is, z/R, and
2) the ratio of forward velocity to in duced velocity at hover, that is, V/vh .
Operating conditions for Crazyflie are thus determined based on non-dimensionalized altitudes and velocities of Hummingbird. Due to the limita tion of maximum velocity for Crazyflie and the constrained size of testing area, we choose five distinct forward veloci ties V ∈{0,0.52,1.05,1.57,2.10} m/s (corresponding to V ∈ {0,0.5,1,1.5,2} m/s for Hummingbird), and six IGE altitudes z ∈{0.035,0.046,0.058,0.069,0.092,0.115} m (correspond ing to z ∈{0.15,0.2,0.25,0.3,0.4,0.5} m for Hummingbird). Further, we add the OGE altitude, set at 1 m. This leads to a total of 35 distinct case studies. For each case study, we collect 20 experimental trials.The Crazyflie follows straight-line trajectories. A geometric controller [31], [33] is used to track desired trajectories with the Crazyflie.
B. Analysis of Experimental Data
Experimental trials are parameterized based on the UAV’s forward velocity and altitude. To quantify the produced rotor thrust along a trajectory, one can follow the aerodynamic equations commonly used in rotorcraft [7]

where ρa is the density of air, α is the angle of attack, v∞ and vi are the free-stream velocity and induced velocity, respectively. Note that v∞ =0 at hover.Next,the induced velocity inforward f light, vi, can be found as [7]

(We note here that we implicit follow results based on Momentum Theory, and assume uniform induced velocity at hover and forward flight. Possible inaccuracies may be caused over aggressive maneuvers when the angle of attack is large. In this case, more accurate expressions may be used based on Blade Element (Momentum) Theory.)
where vh is the induced velocity at hover given by

(悬停时的诱导速度)
Term Th,r is the required thrust to hover for a single rotor; under ideal conditions it equals mg/4 for a quadrotor of mass m. We denote the thrust produced by each propeller in OGE and IGE, TOGE and TIGE, respectively. Note that instead of applying(1), thrust is directly calculated from experimental data. To create the models (based on Hummingbirddata) we use rotor RPM values reported by the vehicles firmware to calculate the thrust as per T = kfω2.Thrust coefficient kf for Hummingbird is found experimentally and set at 5.95 · 10−8 N/RPM2. For Crazyflie, we calculate thrust by directly converting consumed motor power per the manufacturer’s power-thrust curves.
Th,r是单个旋翼悬停所需的推力;在理想条件下,对于质量为m的四旋翼,它等于mg/4。我们分别表示OGE和IGE、TOGE和TIGE中每个螺旋桨产生的推力。请注意,推力是直接根据实验数据计算的,而不是应用(1)。为了创建模型(基于蜂鸟数据),我们使用车辆固件报告的转子转速值根据T=kfω2计算推力。蜂鸟的推力系数kf是通过实验发现的,设置为5.95·10−8 N/RPM2。对于Crazyflie,我们根据制造商的功率-推力曲线直接转换消耗的电机功率来计算推力。
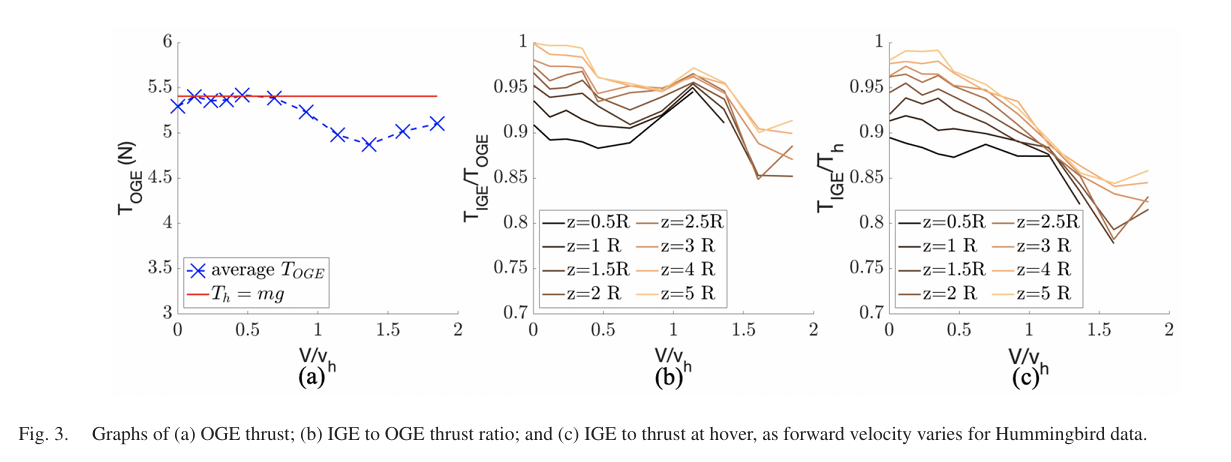
Figure 3(a) depicts TOGE as forward velocity V varies for Hummingbird. The solid line (in red) indicates thrust at hover Th =mg; marks (in blue) depict the average OGE thrust. We observe that the thrust remains practically constant when V/vh is in the range[0,0.7]. As forward velocity increases,the vehicle pitches forward more, the angle of attack increases, and the rotor induced velocity increases as per (2). Produced rotor thrust increases as per (1), thus decreasing the required thrust the flight controller needs to command. When V/vh > 0.7, TOGE starts to decrease. Thrust keeps decreasing and reaches curve minima around V/vh =1.4. When V/vh > 1.4, thrust increases again. One explanation is that when forward velocity increases over V/vh > 1.4,drag dominates and cancels the effect of increased induced velocity [34], [35]; more thrust is required to maintain constant OGE forward velocity.
图3(a)描绘了蜂鸟前进速度V变化时的TOGE。实线(红色)表示悬停时的推力Th=mg;标记(蓝色)表示OGE的平均推力。我们观察到,当V/vh在[0,0.7]范围内时,推力几乎保持不变。随着前进速度的增加,车辆向前俯仰更多,迎角增加,转子诱导速度增加,如(2)所示。产生的旋翼推力按照(1)增加,从而降低了飞行控制器需要指令的所需推力。当V/vh>0.7时,TOGE开始下降。推力不断减小,在V/vh=1.4左右达到曲线最小值。当V/vh>1.4时,推力再次增加。一种解释是,当前进速度增加到V/vh>1.4时,阻力占主导地位,抵消了诱导速度增加的影响[34],[35];需要更大的推力来保持恒定的OGE前进速度。
Analysis in Section V is based on the ratio TIGE/Th.It has been found [17] that the rotor thrust increases for given power as it approaches the ground due to ground effect. Under the constant-power assumption, some existing models [18], [23] look into the ratio of thrust OGE to thrust IGE, TIGE/TOGE, with respect to the ratio z/R. Those models focus on ground effect at hover. At OGE hover, ideally TOGE = Th = mg; hence, TOGE is constant through the studies, and these models indeed study TIGE/Th. However, when the vehicle moves forward, the required thrust varies during the entire flight due to feedback control. Figure 3(b) depicts TIGE/TOGE as V varies for Hummingbird. In principle, TOGE should be the same for a given forward velocity (recall commanded trajectories in Fig. 2). However,small variations due to noise and measurement errors on TOGE lead to improper noise magnification in the TIGE/TOGE ratio representation.
第五节中的分析基于TIGE/Th比值。已经发现[17],由于地面效应,转子推力在接近地面时会随着给定功率的增加而增加。在恒功率假设下,一些现有的模型[18]、[23]研究了推力OGE与推力IGE的比值TIGE/TOGE与z/R的比值。这些模型侧重于悬停时的地面效应。在OGE悬停时,理想情况下TOGE=Th=mg;因此,通过研究,TOGE是恒定的,这些模型确实研究了TIGE/Th。然而,当飞行器向前移动时,由于反馈控制,在整个飞行过程中所需的推力会发生变化。图3(b)描绘了蜂鸟V变化时的TIGE/TOGE。原则上,对于给定的前进速度,TOGE应该是相同的(回忆图2中的指令轨迹)。然而,由于TOGE上的噪声和测量误差导致的微小变化会导致TIGE/TOGE比率表示中的噪声放大不当。
Figure 3(c) shows TIGE/Th = TIGE/mg with respect to forward velocity for different heights to ground. The ratio decreases as V increases, then starts to increase again around V/vh =1.4, where drag appears to begin to dominate, which is consistent with flight OGE (cf. Fig. 3(a)).
图3(c)显示了不同高度下相对于地面的前进速度的TIGE/Th=TIGE/mg。该比值随着V的增加而减小,然后在V/vh=1.4左右再次开始增加,此时阻力似乎开始占主导地位,这与飞行OGE是一致的(参见图3(a))。
IV. EVALUATION OF EXISTING MODELS
The Cheeseman & Bennett model [17] considers forward velocity and distance from the ground for a single rotor, while other models [14], [18], [23] involve only hover. In this section, we examine the suitability of those four models for small-scale quadrotors operating IGE in forward flight.
Cheeseman&Bennett模型[17]考虑了单个旋翼的前进速度和离地距离,而其他模型[14]、[18]、[23]只涉及悬停。在本节中,我们将研究这四种模型对于在前进飞行中运行IGE的小型四旋翼机的适用性。
A. Results of Fitting Existing Models
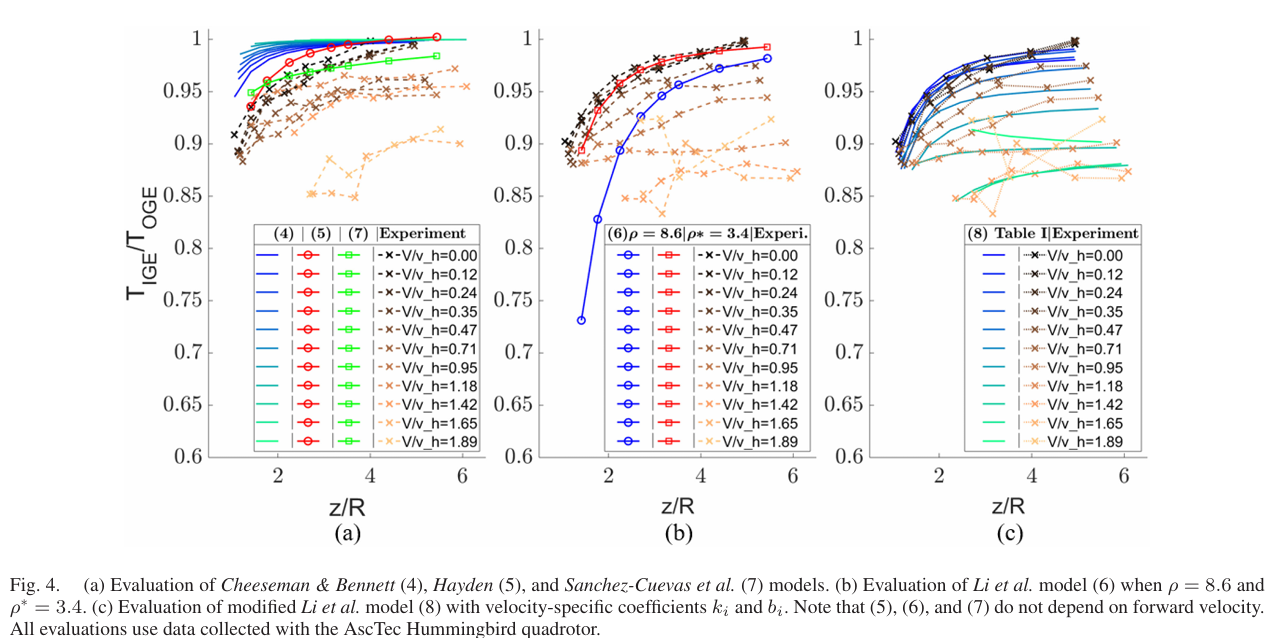
We evaluate existing models with data collected from the Hummingbird. First,we evaluate (4),which considers both altitude and forward velocity[17]. In Fig.4(a),dashed curves with ‘x’ markers show the results from our experiments; forward velocity increases as color changes from brown to orange.Solid curves (in shades of blue) show the predicted TIGE/TOGE using Cheeseman&Bennett’s model;forward velocity increases as color changes from darkblue to cyan.The model predicts that ground effect diminishes as forward velocity increases. Results indicate (cf.[19]–[21]) that the influence of the ground is apparent up to heights of z=5R, which is much higher than classic predictions[17].Eventhough experimental results agree with the general trend of (4), the existence of offsets show that Cheeseman&Bennett’s model predicts higher required thrust.The solid curve with circular markers (in red) shows the predicted TIGE/TOGE using Hayden’s model.Since this model is extracted from test data, it fits the trend at hover,but it does not consider the influence of forward velocity.
我们使用从蜂鸟收集的数据来评估现有模型。首先,我们评估(4),它考虑了高度和前进速度[17]。在图4(a)中,带有“x”标记的虚线显示了我们的实验结果;随着颜色从棕色变为橙色,前进速度增加。实线(蓝色阴影)显示了使用Cheeseman&Bennett模型预测的TIGE/TOGE;随着颜色从深蓝色变为青色,前进速度增加。该模型预测,随着前进速度的增加,地面效应会减弱。结果表明(参见[19]-[21]),地面的影响在z=5R的高度上是显而易见的,这远高于经典预测[17]。尽管实验结果与(4)的总体趋势一致,但偏移的存在表明Cheeseman和Bennett的模型预测了更高的所需推力。带有圆形标记的实线(红色)显示了使用Hayden模型预测的TIGE/TOGE。由于该模型是从测试数据中提取的,因此它符合悬停时的趋势,但没有考虑前进速度的影响。
Li et al.[14] identify the coefficient ρ in(6) at 8.6 with hover experiments at different altitudes.The solid curve with circular markers (in blue) in Fig. 4(b) shows the fitting of (6) to our experimental data.The trend of (6) does not agree with our experiment results.Fitting ourexperimental data to (6) gives ρ∗=3.4.The plot with ρ∗=3.4 is shown inFig.4(b) via the solid curve with square markers (in red).Results show that this model works well at hover,however, it still does not describe the influence of forward velocity.
Li 等人[14] 通过不同高度的悬停实验,确定(6)中系数ρ为8.6。图4(b)中带有圆形标记的实线(蓝色)显示了(6)与我们的实验数据的拟合。(6)的趋势与我们的实验结果不一致。将我们的实验数据拟合到(6)中,得到ρ∗=3.4。图4(b)通过带有方形标记的实线(红色)显示了ρ∗=3.4的图。结果表明,该模型在悬停状态下表现良好,但仍不能描述前进速度的影响。
Next,we examine a model in the general form of (6),i.e.

to fit the experimental data.Different parameters ki and bi are determined for different forward velocities. Identified values of ki and bi are given in TableI.Fitting results are plotted in Fig.4(c).The problem with (8) is that it fails to involve both z and V as variables.
以拟合实验数据。针对不同的前进速度,确定了不同的参数ki和bi。ki和bi的确定值如表I所示。拟合结果如图4(c)所示。(8)的问题在于,它没有将z和V都作为变量。
Results of fitting model (7) to data are given in Fig.4(a) with square markers (in green). The model does not consider forward velocity, and thus it is not surprising that it cannot describe ground effect in forward flight
模型(7)与数据的拟合结果如图4(a)所示,带有方形标记(绿色)。该模型不考虑前进速度,因此它不能描述前进飞行中的地面效应也就不足为奇了
Our analysis indicates that existing models [14], [17], [18], [23]cannot fully describe the rotor performance for a multi-rotor vehicle in forward flight and in proximity to the ground.
我们的分析表明,现有的模型[14]、[17]、[18]、[23]无法完全描述多旋翼飞行器在向前飞行和接近地面时的旋翼性能。
V. PROPOSED MODELS
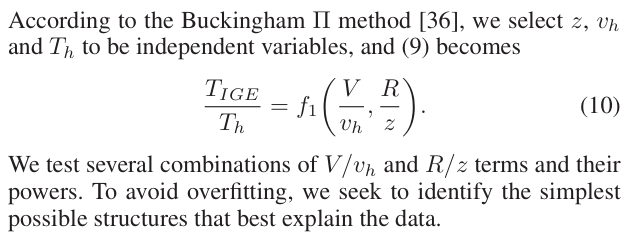
We propose two new models for analyzing produced thrust under the influence of ground effect in both hover and forward f light. Model structures are determined by the Buckingham Π method [36], and parameter values are identified via least squares optimization with data from Hummingbird. Our pro posed models are evaluated and validated against data from Crazyflie. Note that the thrust, altitude, and forward velocity used in both fitting and evaluation use measured values. This helps remove dependence on the specific type of controller employed. We take average over trials to reduce variance.
我们提出了两个新模型,用于分析悬停和前向飞行中地面效应影响下产生的推力。模型结构由Buckingham∏方法确定[36],参数值通过Hummingbird数据的最小二乘优化确定。我们提出的模型根据Crazyflie的数据进行了评估和验证。请注意,在拟合和评估中使用的推力、高度和前进速度都使用测量值。这有助于消除对所采用的特定类型控制器的依赖。我们采用平均值来减少方差。
Figure 4 shows that curves for lower forward velocities tend to cluster and be smoother than their higher speed counter parts. This evidence suggests that the ground effect exhibits a much stronger dependency on the altitude compared to forward velocity, within the range of low to medium forward veloci ties. Further, results from first-principles based modeling [35] suggest that around 8 m/s the required thrust should increase. Detailed aerodynamics analysis suggests that translational drag becomes more pronounced as forward velocity increases over a threshold [34]. Without considering ground effect, a data-driven model [37] is proposed to represent thrust (includes both real thrust generated bypropellers anddragforceactingontheframe and rotors) as third order polynomial with respect to forward velocity. Inspired by these findings, for each of our proposed models we provide separate forms for i) low/medium forward velocity, and ii) high forward velocity.
图4显示,较低前进速度的曲线往往会聚集在一起,并且比较高速度的对应部分更平滑。这一证据表明,与前进速度相比,在低到中等前进速度范围内,地面效应对高度的依赖性更强。此外,基于第一性原理的建模结果[35]表明,所需的推力应增加约8 m/s。详细的空气动力学分析表明,当前进速度超过阈值时,平移阻力会变得更加明显[34]。在不考虑地面效应的情况下,提出了一种数据驱动模型[37],将推力(包括由螺旋桨产生的实际推力和作用在框架和转子上的推力)表示为相对于前进速度的三阶多项式。受这些发现的启发,对于我们提出的每种模型,我们都为i)低/中前进速度和ii)高前进速度提供了单独的形式。
The functional expression of thrust in terms of altitude z and forward velocity V is found by non-dimensional analysis:
通过无量纲分析,我们得到了推力随高度z和前进速度V变化的函数表达式:
![]()
A. Proposed Model 1
Model 1 builds on top of the structure of (10). We split the velocity into two groups, V/vh ∈ [0,1.2] is considered low-to medium speed, V/vh > 1.2 is considered high speed.
模型1建立在(10)的结构之上。我们将速度分为两组,V/vh∈[0,1.2]被认为是低速到中速,V/vh>1.2被认为是高速。
1) Low/Medium Speed Flight:
We propose

This form includes a term of higher than second order poly nomial for V , which agrees with analytical [34], [35] and experimental [5], [37] results. As z increases, the vehicle is less influenced by ground effect, thus TIGE/Th increases. As V increases, the induced velocity increases, hence less thrust is required and TIGE/Th decreases. At hover,
这种形式包括V的一个高于二阶多项式的项,这与分析[34]、[35]和实验[5]、[37]的结果一致。随着z的增加,车辆受地面效应的影响较小,因此TIGE/Th增加。随着V的增加,诱导速度增加,因此所需的推力减小,TIGE/Th减小。在悬停时,

and (12) agrees with previous studies in the sense that the required thrust varies based on the vehicle’s distance from the ground. When z>5R, 3R 25z < 0.024, and TIGE ≈ Th.
以及(12)与之前的研究一致,因为所需的推力会根据车辆离地面的距离而变化。当z>5R时,3R/25z<0.024,TIGE≈Th。
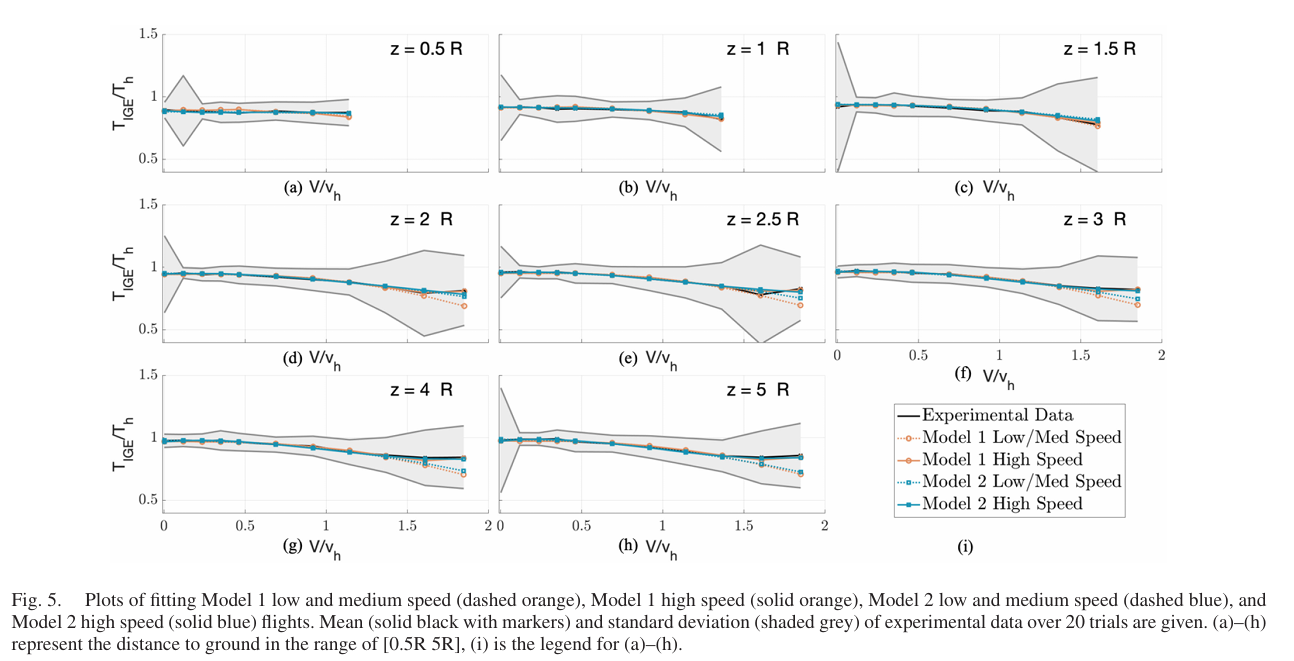
Fitting Model 1 for low/medium velocity is given in Fig. 5. Solid curves (in black) with ‘x’ markers denote the results calculated by using the measured velocity from motion capture and the calculated thrust based on reported RPM values. One standard deviation bounds are shown with light gray back ground.Dashed curves with circular markers (in orange) show the predicted thrust from (11). The Root Mean Squared Error (RMSE) and Mean Absolute Error (MAE) for fitting (11) to experimental data are given in Table II.
图5给出了低/中速的拟合模型1。带有“x”标记的实线(黑色)表示使用运动捕捉的测量速度和基于报告的RPM值计算的推力计算的结果。一个标准偏差界限以浅灰色背景显示。带有圆形标记(橙色)的虚线曲线显示了根据(11)预测的推力。表II给出了将(11)拟合到实验数据的均方根误差(RMSE)和平均绝对误差(MAE)。
2) High Speed Flight:
As velocity increases, drag starts to dominate [34], [35] and thrust increases. To represent the influence of drag, we add a third order polynomial term in V :

Fitting results for high speed flight in Fig. 5 are shown by solid curves with circular markers (in orange). Equation (13) predicts the trend of TIGE/Th as V increases, as well as the curve minima around V/vh =1.4 −1.6.
图5中高速飞行的拟合结果由带圆形标记的实线(橙色)显示。方程式(13)预测了随着V的增加,TIGE/Th的趋势,以及V/vh=1.4−1.6附近的曲线最小值。
The RMSE and MAE for predicting high speed flight perfor manceusing (13) are given inTable II. The table shows that (11) has slightly better overall prediction accuracy compared to (13). If this performance deficit is not particularly significant, one can apply (13) for predicting thrust IGE for all velocities up to V/vh =1.9. Models (11) and (13) both have best prediction accuracy when z =2R, and worst at z =0.5R. Data suggest that as the order of R/z increases, we get slightly better fit for flights at hover; as the order of V/vh increases, we get better fit of the curve trends.
B. Proposed Model 2
For Model 2, we first consider thrust as a function of V/vh, then fit the coefficients as a function of R/z. Similarly to Model 1, we also provide separate models for low and medium speed, and for high speed flight.
对于模型2,我们首先将推力视为V/vh的函数,然后将系数拟合为R/z的函数。与模型1类似,我们还为低速、中速和高速飞行提供了单独的模型。
1) Low/Medium Speed Flight: In this case we propose

Model2 fitting results for low-to-medium-speed flight are given in Fig. 5 via dashed curves with square markers (in blue). Corresponding RMSE and MAE values are given in Table II.
图5通过带有方形标记(蓝色)的虚线曲线给出了低速至中速飞行的模型2拟合结果。表II给出了相应的RMSE和MAE值。
Equation(14) has lower order term of V/vh compared to (11). However, since the coefficient of ( V vh )2 is a function of R/z, the trend of thrust change as V increases is less evident. At hover, (14) becomes TIGE/Th =−0.171R/z +1.02,whichisafunc tion of height only, as desired.
与(11)相比,方程(14)具有较低阶的V/vh项。然而,由于(V vh)2的系数是R/z的函数,因此随着V的增加,推力变化的趋势不太明显。悬停时,(14)变为TIGE/Th=-0.171R/z+1.02,根据需要,这仅是高度的函数。
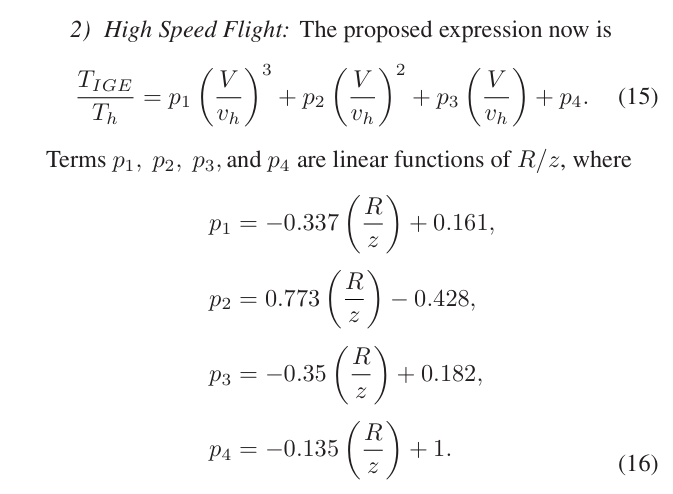
Term ( V / vh )3 describes the effect of increased drag, and agrees with reported results [34], [35] that consider higher-order terms for V . Fitting results for high speed flight using Model 2 are shown in Fig. 5 via solid curves with square markers (in blue). RMSE and MAE values for (15) are given in Table II.
项(V/vh)3描述了阻力增加的影响,并与考虑V的高阶项的报告结果[34]、[35]一致。使用模型2进行高速飞行的拟合结果如图5所示,通过带有方形标记的实线(蓝色)。表II给出了(15)的RMSE和MAE值。
Model 2 gives the best and the worst prediction accuracy at z =0.5R and z =2R, respectively, for high speed flight. However, Model 2 does not reflect as clearly the curve increase aroundV/vh =1.4 −1.6.The overall prediction error of Model 2 is less than the error of Model1, which is expected since Model 2 has more parameters.
对于高速飞行,模型2在z=0.5R和z=2R时分别给出了最佳和最差的预测精度。然而,模型2并没有清楚地反映V/vh=1.4−1.6附近的曲线增加。模型2的总体预测误差小于模型1的误差,这是意料之中的,因为模型2有更多的参数。
Each proposed model provides advantages in different situations. For Model 1, (13) offers a single function for predicting rotor performance for the whole velocity range,at the expense of accuracy. In both forms of Model1,the terms that involve V and z are isolated. This simple expression enables direct estimation of thrust change due to altering velocity and height. In addition, Model 1 describes the decrease-increase curve trend and the minimal point moreclearly compared to Model2. The latter can better predict the IGE thrust for small distances from the ground. In Table II, Model 2 shows better overall performance for low and medium speed. Thus, when prediction accuracy is the main concern, Model 2 may be preferable. Furthermore, both high speed models indicate that, for V/vh > 1.88, required thrust increases steadily. One explanation is that, for high velocity, higher-order drag effects begin to dominate [34], effectively canceling the positive effects of induced velocity and hence increasing required thrust.
每种提出的模型在不同的情况下都有优势。对于模型1,(13)提供了一个单一的函数来预测整个速度范围内的转子性能,但以牺牲准确性为代价。在Model1的两种形式中,涉及V和z的项是孤立的。这个简单的表达式可以直接估计由于速度和高度变化而导致的推力变化。此外,与模型2相比,模型1更清楚地描述了减少-增加曲线趋势和最小点。后者可以更好地预测离地面小距离的IGE推力。在表II中,型号2在低速和中速下显示出更好的整体性能。因此,当预测精度是主要关注点时,模型2可能是优选的。此外,两种高速模型都表明,当V/vh>1.88时,所需的推力会稳步增加。一种解释是,对于高速,高阶阻力效应开始占主导地位[34],有效地抵消了诱导速度的积极影响,从而增加了所需的推力。
C. Evaluation of Proposed Models
We validate the proposed models with the data collected from Crazyflie. Figure 6 shows the prediction results. In each subplot, dashed curves with ‘x’ markers show the results from our experiments; commanded altitude increases as color changes from brown to orange. Solid curves (in shades of blue) show the predicted TIGE/Th using (a) Model1 low speed(11), (b)Model 1 high speed (13), (c) Model 2 low speed (14), (c) Model 2 high speed(15); commanded altitude increases as color changes from dark blue to cyan. The RMSE and MAE for prediction are given in Table II.
我们用从Crazyflie收集的数据验证了所提出的模型。图6显示了预测结果。在每个子图中,带有“x”标记的虚线曲线显示了我们的实验结果;随着颜色从棕色变为橙色,指令高度增加。实线(蓝色阴影)显示了使用(a)模型1低速(11)、(b)模型1高速(13)、(c)模型2低速(14)、(d)模型2高速(15)预测的TIGE/Th;随着颜色从深蓝色变为青色,指令高度增加。表II给出了预测的RMSE和MAE。
The result shows that proposed models fitted with Humming bird data are able to predict TIGE/Th for another quadrotor in the case of different frame size, mass, trajectories, controller,and environment. Both low/medium speed and high speed versions of the models give similar predictions since collected data correspond to low/medium speed flight.
结果表明,在不同框架尺寸、质量、轨迹、控制器和环境的情况下,所提出的与蜂鸟数据拟合的模型能够预测另一架四旋翼飞行器的TIGE/Th。低/中速和高速版本的模型都给出了类似的预测,因为收集的数据对应于低/中速飞行。
VI. CONCLUSION
This letter proposes two new models to explain the impact of ground effect both at hover and in forward flight for small-scale rotorcraft UAVs. We evaluate the influence of vehicle forward velocity and altitude to ground effect. Extensive experiments under varying velocities and altitudes are conducted with two distinct quadrotor UAVs of different size and mass.
Collected data indicate that, for fixed altitude, the required thrust initially decreases, then reaches a curve minimum, and finally increases, as forward velocity increases. Existing ground effect models for helicopters or multirotors at hover fail to capture this phenomenon in forward flight.
To address this gap, we provide two new models that uniquely blend data-driven methods with non-dimensional analysis and first-principles aerodynamics. A key benefit of the proposed models is that they establish clear and intuitive relations between robot-relevant and operation-relevant parameters (e.g., induced velocity and rotor radius, and forward velocity and altitude, respectively). Taken together, the two models establish trade offs between model complexity, structure, and training/validation accuracy.
Both models are tested in hover and up to 8 m/s forward velocity. To capture observed curve minima as forward velocity increases, we provide two variants for each model: 1) a hover and low-to-medium-speed, and 2) a high-speed variant. The first variant is validated with data from a quadrotor of smaller size and lower weight. This finding enhances the generalization capability of our proposed models for quadrotor UAVs at hover and in low-to-medium-speed forward flight. Consistent with related work [5], [34], [35], [37] suggesting that as speed increases higher-order aerodynamic effects (e.g., drag) begin to dominate, a third order polynomial velocity term is included in high-speed variants. While robot and workspace constraints hindered validation of high-speed variants with the smaller quadrotor, we anticipate that our models can be enhanced with models aimed at capturing higher-ordered aerodynamic effects occurring as forward velocity increases (e.g.,[34]) to better capture quadrotor behaviors in high-speed flight.
The work here contributes to promoting the understanding of how proximity to the ground affects the behavior of small-scale rotorcraft UAVs across various operating conditions in terms of altitude and forward velocity. This is the first study that captures ground effects through extensive indoor experimentation across several altitudes and forward velocities. Eventhough this work is grounded on quadrotors—one of the most prevalent type of UAV nowadays[38]—our findings may guide analysis of other multirotor vehicles with distinct number of rotors, or very different scaling among rotor radius, arm length, and frame shape. Other interesting directions of future research may include performing a CFD simulation to observe the behavior of the flow field and thus better link data-driven and physics-based approaches for modeling the impact aerodynamic effects on UAV behavior. Furthermore, the new knowledge created by this work may contribute to applications that involve near-ground operations in aerial manipulation and multi-robot systems
这封信提出了两个新模型来解释小型旋翼无人机在悬停和前飞时地面效应的影响。我们评估了车辆前进速度和高度对地面效应的影响。在不同速度和高度下,对两种不同尺寸和质量的四旋翼无人机进行了广泛的实验。
收集的数据表明,对于固定高度,随着前进速度的增加,所需的推力最初会减小,然后达到曲线最小值,最后会增加。现有的直升机或多旋翼悬停时的地面效应模型无法捕捉到前进飞行中的这种现象。
为了解决这一差距,我们提供了两种新模型,将数据驱动方法与无量纲分析和第一原理空气动力学独特地融合在一起。所提出的模型的一个关键好处是,它们在机器人相关参数和操作相关参数之间建立了清晰直观的关系(例如,分别为诱导速度和转子半径,以及前进速度和高度)。总的来说,这两个模型在模型复杂性、结构和训练/验证准确性之间建立了权衡。
这两种模型都在悬停和高达8 m/s的前进速度下进行了测试。为了捕捉前进速度增加时观察到的曲线最小值,我们为每种模型提供了两种变体:1)悬停和低速到中速,2)高速变体。第一种变体通过来自尺寸较小、重量较轻的四旋翼的数据进行了验证。这一发现增强了我们提出的四旋翼无人机悬停和中低速前进飞行模型的泛化能力。与相关工作[5]、[34]、[35]、[37]一致,这些工作表明,随着速度的增加,高阶气动效应(如阻力)开始占主导地位,高速变体中包含了三阶多项式速度项。虽然机器人和工作空间的限制阻碍了对较小四旋翼高速变体的验证,但我们预计,我们的模型可以通过旨在捕捉随着前进速度增加而发生的更高阶气动效应的模型来增强(例如[34]),以更好地捕捉高速飞行中的四旋翼行为。
这里的工作有助于促进对接近地面如何影响小型旋翼无人机在各种操作条件下在高度和前进速度方面的行为的理解。这是第一项通过在几个高度和前进速度上进行广泛的室内实验来捕捉地面效应的研究。尽管这项工作是基于四旋翼飞行器——当今最流行的无人机类型之一[38]——我们的研究结果可能会指导对其他具有不同数量旋翼或旋翼半径、臂长和框架形状之间非常不同比例的多旋翼飞行器的分析。未来研究的其他有趣方向可能包括进行CFD模拟以观察流场的行为,从而更好地将数据驱动和基于物理的方法联系起来,对无人机行为的冲击气动效应进行建模。此外,这项工作创造的新知识可能有助于在空中操纵和多机器人系统中涉及近地操作的应用