LIN总线
前言
本文参考:【LIN总线】LIN总线传输协议 - Emma1111 - 博客园
一、汽车中常用总线介绍
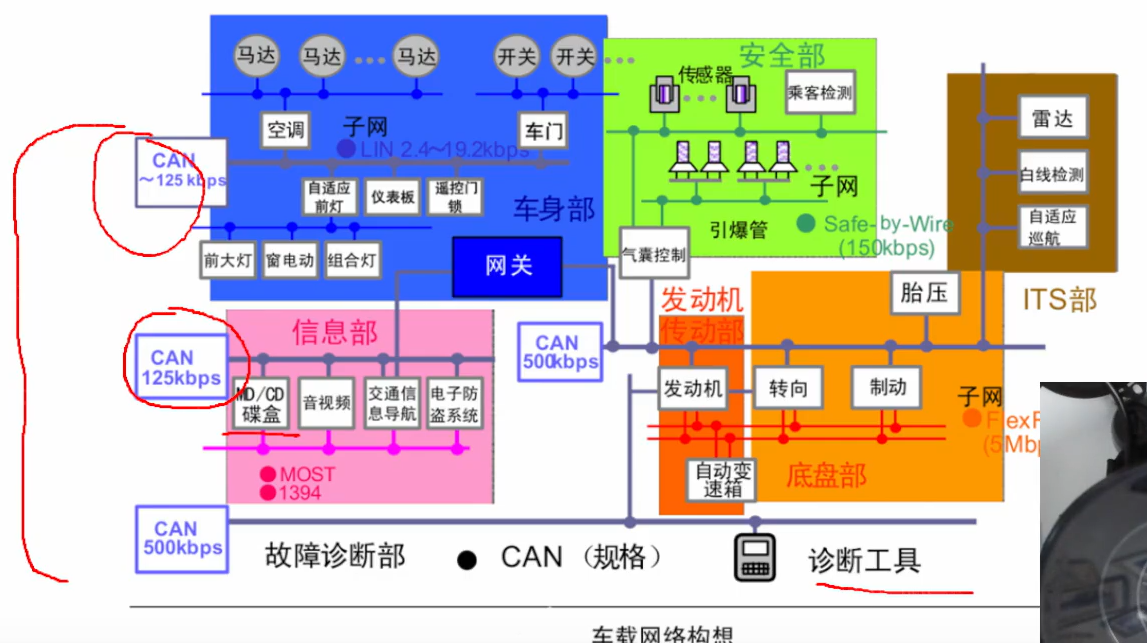
目前,汽车主流总线类型分以下四类:
-
LIN总线:通讯速度为10-125k,主要应用在汽车门窗、雨刮、灯光、座椅等部件。
-
CAN总线:通讯速度为125k-1M,主要应用在汽车空调、电子指示、故障检测等部件。
-
FlexRay:通讯速度为1M-10M,主要应用在汽车引擎控制、ABS、高级驾驶辅助等部件。
-
Most(逐渐被车载以太网取代):通讯速度为10M以上,主要应用在汽车导航系统、多媒体娱乐等部件。
-
车载以太网:通讯速度高达Gbps,主要应用在智能座舱、自动驾驶、OTA升级方面。
二、LIN总线介绍
2.1 LIN总线概念
核心比喻:LIN总线就像一个 “部门内部的对讲机”。
想象一下,一个公司里有好几个部门。部门内部成员之间需要沟通,但没必要都用公司昂贵的电话系统(这相当于CAN总线)。他们会用一个便宜又实用的内部对讲机。
-
CAN总线 = 公司的正式电话系统
-
速度快,能同时多人通话(仲裁),但设备贵,线路复杂。
-
用于重要部门之间沟通(如发动机部和刹车部)。
-
-
LIN总线 = 部门内部的简易对讲机
-
速度慢,一次只能一个人说,但设备便宜,布线简单。
-
用于部门内部琐碎的事务沟通。
-
我们可以这样理解LIN总线:
它是汽车里一个低成本、低速度的“局部区域网络”。它采用“经理点名,员工回答” 的简单工作模式,专门负责处理那些不重要、不紧急的“杂活”,从而让更高级、更昂贵的CAN总线能腾出资源,去处理像发动机、刹车这样的“重要大事”。
2.2 LIN总线的工作模式
在这个“对讲机”网络里,有且只有一个经理(主节点),和几个员工(从节点)。
规则很简单:只有经理有权利发起对话,员工不能随便发言。
-
经理点名:经理拿起对讲机喊:“小王,报告一下你的情况!”
这在LIN总线里叫做发送 “报头”,里面包含了“小王”的ID。 -
员工答到:员工小王听到叫自己的名字,立刻回答:“经理,我一切正常。”
这在LIN总线里叫做发送 “响应”,里面包含了小王的具体数据。 -
其他员工:员工小张和小李也听到了,但发现叫的不是自己的名字,所以他们保持沉默。
这个过程就是LIN总线最核心的“单主多从”和“一问一答”机制。
2.3 LIN总线的特点
-
便宜是王道
-
它只用一根信号线,极大地节省了线束成本和重量。
-
对“员工”(从节点)的要求很低,可以用非常简单的芯片实现,进一步降低成本。
-
-
速度慢,但够用
-
它的传输速度最高只有CAN总线的几十分之一(最高20kbps)。
-
但这对于控制车窗升降、读取按钮状态、调节后视镜这些“慢动作”来说,完全足够了。
-
-
结构简单
-
网络里必须有且只有一个“经理”(主节点),通常是像车门模块、座椅控制器这样的稍复杂一点的电脑。
-
“员工”(从节点)就是那些简单的开关、传感器和小电机。
-
2.4 LIN总线在车上用来干什么?
所有那些不涉及驾驶安全、动作不紧急、但又需要智能控制的地方,都是LIN总线的用武之地:
-
车门:控制车窗升降、门锁、后视镜折叠/调节。
-
座椅:调节座椅位置、记忆座椅设定、座椅加热。
-
方向盘:上面的多媒体按键、巡航控制按键。
-
空调:控制风门执行器、检测阳光强度。
-
车顶:控制天窗开关、阅读灯。
三、LIN报文结构
3.1 核心比喻
我们用一个非常生动的例子—— “老师课堂点名提问” ,来彻底讲懂LIN报文结构。
核心比喻:一堂LIN总线的“课”
想象一下LIN总线就是一堂课:
-
老师 = LIN主节点
-
他是课堂上唯一有权力发起提问的人。
-
-
学生们 = LIN从节点
-
他们只有被老师点名时才能回答。
-
-
一次完整的问答 = 一个LIN报文帧
| LIN报文部分 | 在课堂上的比喻 | 详细解释 |
|---|---|---|
| 点名(报头) | 老师发起提问 | 这部分永远由老师(主节点)完成。 |
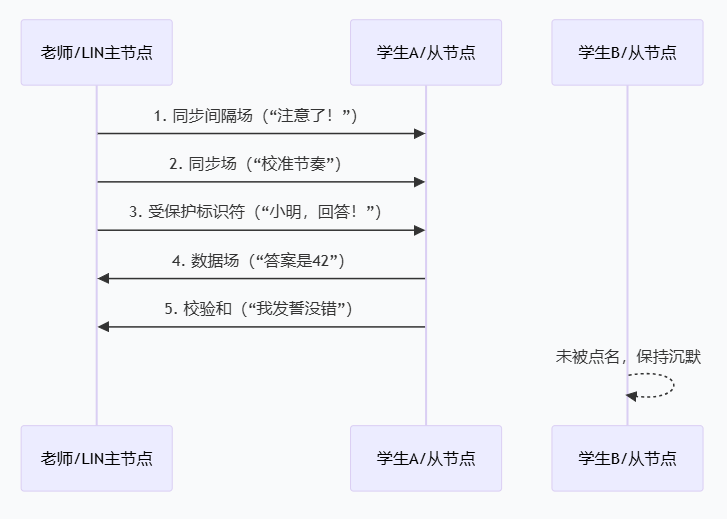
| 1. 同步间隔场 | 老师大喊:“注意了!” | 这是一个又长又特别的停顿,目的是让所有走神的学生(从节点)都抬起头,知道老师要开始提问了。这是LIN报文的开始标志。 |
| 2. 同步场 | 老师有节奏地拍手:“啪-啪-啪-啪” | 老师拍出一个固定的节奏(固定字节 0x55),所有学生都根据这个节奏来校准自己的手表(波特率)。这样大家才能步调一致,听懂后续的问题。 |
| 3. 受保护标识符 | 老师叫:“小明,请你回答!” | 这里包含了两个信息: 1. 问题ID:叫的是“小明”,而不是“小红”。这个ID决定了由哪个学生来回答,以及答案应该多长。 2. 防听错:老师会用一种特殊的语调(奇偶校验位),确保小明不会听成叫“小明”还是“小鹏”。 |
| 回答(响应) | 学生起立回答 | 这部分由被点名的学生(从节点)完成。 |
| 4. 数据场 | 小明回答:“答案是42。” | 这是真正的有用信息,比如“车窗当前位置是80%”。数据长度(1-8字节)由之前的ID决定。 |
| 5. 校验和 | 小明说:“我发誓答案没错!” | 学生对自己的答案做一个保证(计算校验和)。老师和其他同学会验证一下,确保答案在传输过程中没有被干扰出错。 |
整体工作流程回顾
整个LIN报文帧的传输就是一次默契的课堂互动,其流程如下图所示,清晰地展示了从“点名”到“回答”的完整闭环:
总结一下关键点:
-
主从分明:永远是主节点发起(点名),从节点响应(回答)。
-
结构清晰:报文由报头(点名)和响应(回答)两大部分组成,缺一不可。
-
同步是基础:同步场确保了所有设备“步调一致”。
-
ID是关键:受保护标识符(帧ID)决定了谁该回答,以及答案的格式。
-
校验保可靠:校验和用来检查数据是否准确。
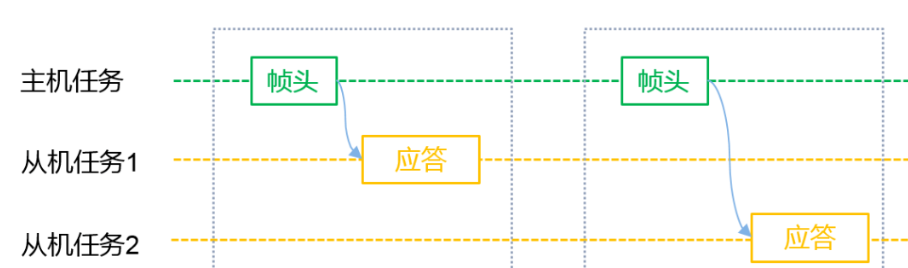
3.2 LIN报文结构(帧头+应答)
LIN报文帧由帧头(Hearder)与应答(Response)两部分组成。如下图所示,传输过程中,主机节点负责发送帧头;从机节点负责接收帧头,然后作出解析决定发送应答,还是接收应答或不回复。
1. 帧头 - 主节点的“点名”(必由主节点发送)
帧头的作用是发起一次通信,并告诉哪个从节点该回应了。它包含三个部分:
| 组成部分 | 通俗解释 | 具体数据内容与规则 |
|---|---|---|
| 同步间隔场 | “全体注意!” | • 时长:一个持续至少13个位时间的显性电平(逻辑0)。 • 作用:这是一个独特的、绝不会在正常数据中出现的信号,用于唤醒所有从节点,并标志一个新帧的开始。 |
| 同步场 | “大家看我的节奏!” | • 固定数据:一个固定的字节 0x55。• 二进制模式: 0x55 的二进制是 01010101,这是一个非常规则的方波。• 作用:从节点通过测量这个方波的间隔,来校准自己的波特率,确保与主节点同步。这是实现低成本从节点的关键。 |
| 受保护标识符 | “小明,你来回答!” | • 数据构成:1个字节,包含6位帧ID + 2位奇偶校验位。 • 帧ID范围: 0x00 - 0x3F (0-63)。它定义了谁该响应以及数据场的长度。• 奇偶校验位: - P0 = ID0 XOR ID1 XOR ID2 XOR ID4- P1 = NOT (ID1 XOR ID3 XOR ID4 XOR ID5)• 作用:确保从节点不会听错ID,并在接收到错误ID时丢弃该帧。 |
2. 应答 - 被点名者的“回答”(可由从节点或主节点发送)
应答的作用是携带真正的有效数据。它由被帧头点名的节点发送。
| 组成部分 | 通俗解释 | 具体数据内容与规则 |
|---|---|---|
| 数据场 | “我的答案是...” | • 数据长度:包含1到8个字节的有效数据。具体长度由帧ID决定。 • 内容:可以是传感器读数、开关状态、控制命令等(如: 车窗位置 = 75%)。• 发送者: - 如果帧ID对应一个从节点,则由该从节点发布数据。 - 如果帧ID对应主节点自身,则由主节点发布数据。 |
| 校验和场 | “我发誓答案没错!” | • 计算方式:1个字节,由发送方计算。 • 两种类型: - 经典校验和:只对数据场的内容进行计算。 - 增强校验和:对受保护标识符(帧ID) 和数据场一起计算。这是新规范的趋势,安全性更高。 |
关键点总结
-
分工明确:帧头(Header)永远由主节点发送,用于调度;应答(Response)由被点名的节点发送,用于提供数据。
-
同步基础:同步间隔场和同步场是建立可靠通信的基础。
-
ID是灵魂:受保护标识符是整个帧头的核心,它决定了通信的对象和内容格式。
-
数据是目的:数据场承载了实际的控制信息或状态信息。
-
校验保可靠:校验和场确保了数据传输的完整性。
总之:
永远只有主节点能发起通信,并且通过调度表 预先规定好了在什么时间点、由主节点去点名哪个从节点,所以整个网络的通信是完全有序、可预测的。
对比CAN:在CAN总线中,任何节点都可以在总线空闲时“抢麦”,可能存在多个节点同时发送的情况,需要通过复杂的“仲裁”机制来决定谁胜出。而LIN总线从设计上就根本不存在“抢麦”的可能,从而彻底避免了冲突。
四、LIN的帧类型
我们把LIN总线的六种帧类型想象成一个 “特种部队小组” 的不同通信模式。这个小组由一名队长(主节点) 和几名队员(从节点) 组成。
核心成员介绍
-
队长:LIN 主节点。唯一的大脑,负责发起所有行动指令。
-
队员1-59号:LIN 从节点,负责执行具体任务。每个队员有一个固定编号(无条件帧ID 0-59)。
现在,我们来看看这个小组的六种作战协议(六种帧类型):
1. 无条件帧 - 【常规点名报数】
-
形象描述:这是最基础、最常用的通信。队长按照花名册,周期性地、无条件地点名。
-
对话示例:
-
队长:“1号!”
-
1号队员:“到!我的状态是‘安全’。”
-
队长:“2号!”
-
2号队员:“到!我的状态是‘弹药充足’。”
-
-
特点:按部就班,风雨无阻。无论队员的数据有没有变化,只要被点到,就必须回答。用于传输最常规、周期性的数据。
2. 事件触发帧 - 【“有情况的举手!”】
-
形象描述:队长为了节省时间,不再一个个点名,而是对一组队员喊:“你们这几个人,谁有情况变化,就报告!”
-
对话示例:
-
队长:“第10-13号小组,有情况的报告!”
-
(只有11号队员的状态发生了变化)
-
11号队员:“报告!11号状态变为‘发现敌情’!”
-
(如果10号和12号同时报告,就会造成“冲突”)
-
-
特点:高效节能。只有当数据发生变化时才响应。但缺点是可能存在冲突(多个队员同时报告)。
3. 零星帧 - 【队长的直觉性询问】
-
形象描述:队长没有固定的询问 schedule,只有当某个先决条件被满足时,他才偶尔、零星地去询问某个特定队员。
-
对话示例:
-
(队长先听到11号报告“发现敌情”)
-
队长心想:“既然有敌情,那我得问问侦察员那边什么情况。”
-
队长:“25号(侦察员),报告你的位置!”
-
-
特点:由事件驱动,非周期性。用于查询那些与另一个事件相关的、不常更新的数据。
4. 诊断帧 - 【专用指挥链路】
-
形象描述:这是队长与单个队员之间的“专属加密频道”,用于进行深度配置、下达特殊命令或读取身份信息。
-
对话示例:
-
队长使用指挥链路:“8号,这是诊断指令:请将你的灵敏度调至最高。”
-
8号通过指挥链路回复:“收到,灵敏度已调整至最高。”
-
-
特点:点对点,功能强大。固定使用两个专用的帧ID(
0x3C和0x3D),数据格式也是固定的8字节,用于实现标准的诊断功能。
5. 用户自定义帧 - 【空白指令】
-
形象描述:队长手里有一个空白的、没有预先定义内容的指令(ID =
0x3E)。他可以根据临时需要,自由定义这个指令的含义和用法。 -
对话示例:
-
队长:“现在发布一个自定义指令,含义是‘全体模仿鸟叫’,开始!”
-
-
特点:灵活,用途未知。为未来的特殊应用保留的“后门”。
6. 保留帧 - 【封存的协议】
-
形象描述:这是一套被封印的指令集(ID =
0x3F - 0xFF),目前禁止使用,是为未来可能开发的“新式武器”或“新战术”预留的。 -
对话示例:
-
(沉默... 目前无人有权使用)
-
-
特点:面向未来。
总结与记忆技巧
你可以这样记忆这六种类型:
| 帧类型 | 记忆口诀 | 解释 |
|---|---|---|
| 无条件帧 | “日常点名” | 最常用,周期性广播。 |
| 事件触发帧 | “有变则报” | 高效,用于数据变化,但可能冲突。 |
| 零星帧 | “偶尔一问” | 非周期,由其他事件触发。 |
| 诊断帧 | “秘密热线” | 专用通道,用于配置和深度命令。 |
| 用户自定义帧 | “空白支票” | 用途灵活,自定义。 |
| 保留帧 | “未来科技” | 为明天做准备。 |
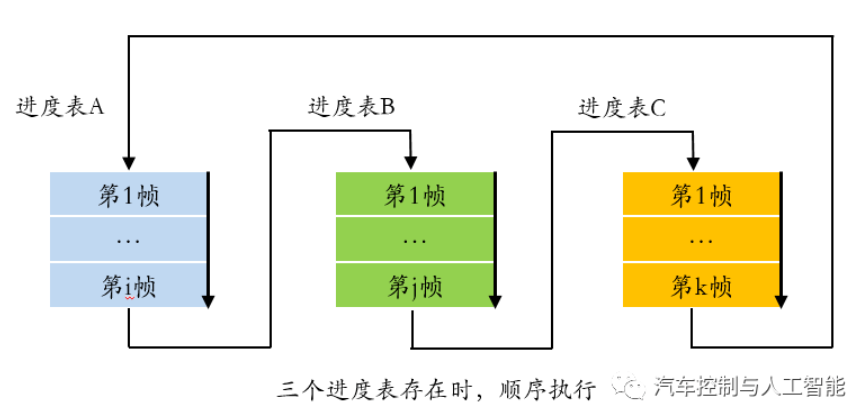
五、调度表
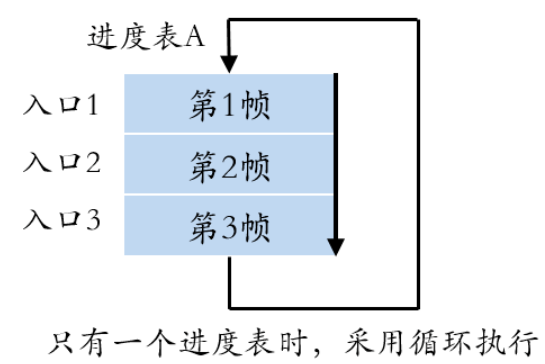
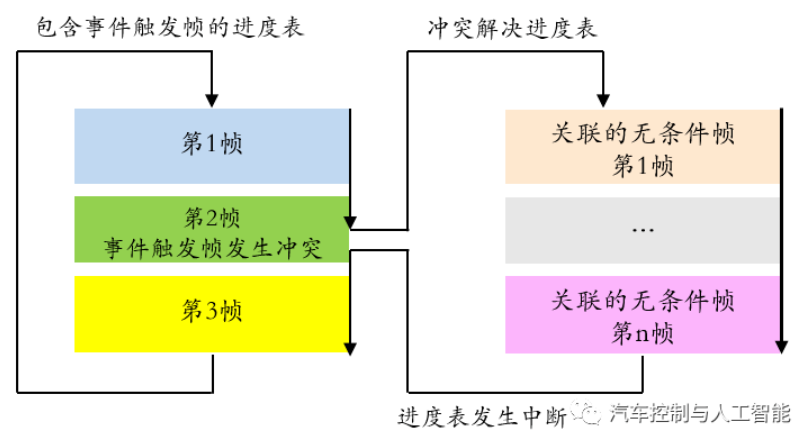
帧的调度表(或进度表)规定了总线上帧的传输次序以及传输时间。调度表位于主机节点,主机任务根据应用程需要进行调度。调度表可以有多个,一般情况下,轮到某个调度表执行的时候,从该调度表的入口处开始执行,到调度表的最后一个帧时,如果没有新的调度表启动则返回到当前调度表的第一个帧开始执行;也有可能在执行到某个调度表时发生中断,跳到另一个调度表后再返回,如事件触发帧就是典型的例子。
总结与优势
LIN调度表的核心作用就是:将不确定的通信,变得确定化。
-
无冲突:因为所有通信都被预先安排在不同的时间槽里,就像乐队不会所有乐器同时乱响一样,LIN总线也不会发生数据冲突。
-
可预测:你可以精确地知道任何一个信号会在什么时候出现在总线上,这对于测试和诊断至关重要。
-
结构化:它使得整个LIN网络的通信行为是规整的、可预期的,而不是杂乱的。
六、实际应用
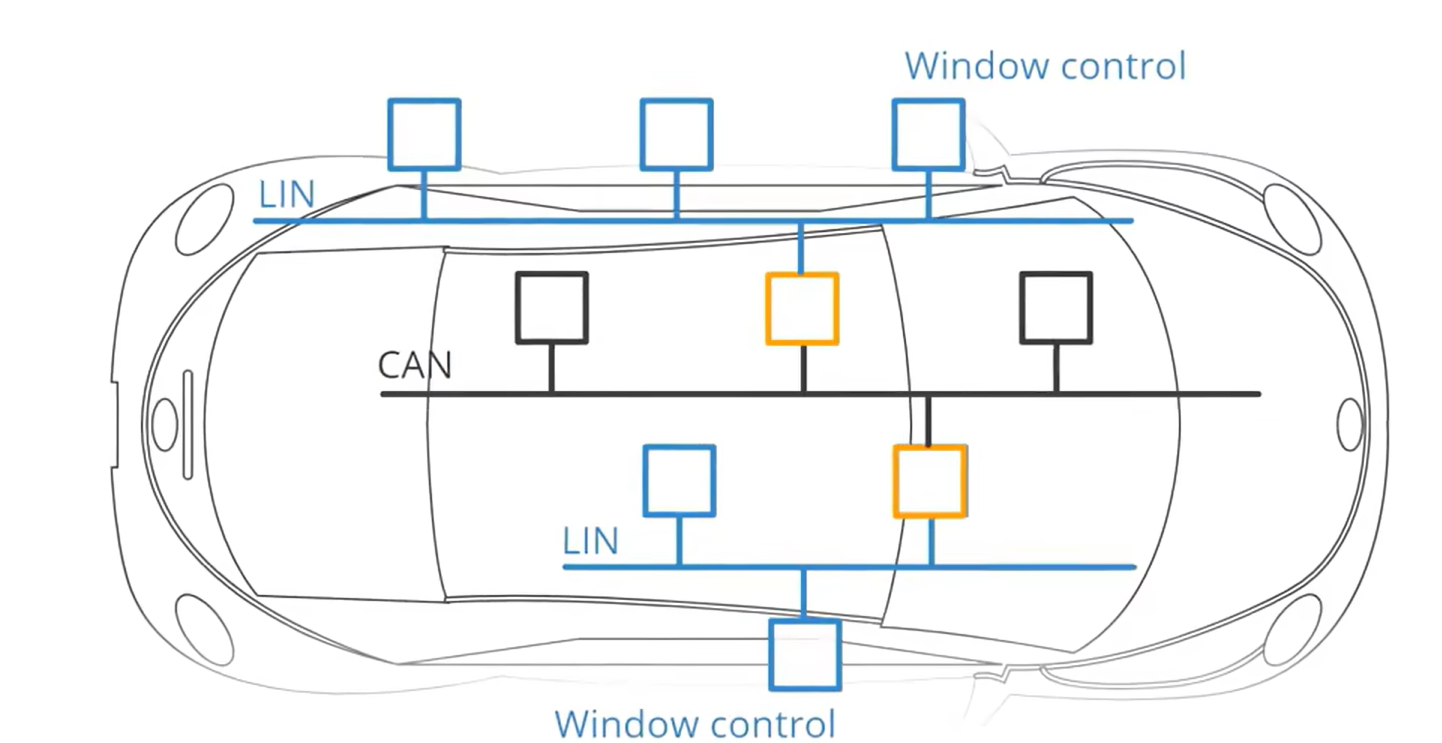
实例:LIN CAN总线的窗户控制
在汽车中,每一个LIN总线集群都有一个作为CAN总线网关的主节点,例如在汽车主驾驶,可以打开副驾驶侧的窗户,当你按下按键后,LIN集群会通过CAN总线向另一个LIN集群发送报文,这就会触发第二个LIN集群操作窗户使窗户打开。
详细过程分解(结合图表)
角色介绍:
-
LIN集群:一个主节点带着几个从节点组成的“部门”。
-
主节点:部门经理。既是本部门的领导,也是部门对外的联络员(CAN网关)。
-
从节点:部门员工。只和经理沟通,不直接对外。
-
CAN总线:公司内部的高速电话系统(所有经理都接入)。
-
本例中的角色分配:
-
主驾车门模块:主驾侧LIN集群的主节点(经理)。
-
主驾车窗开关:主驾侧LIN集群的一个从节点(员工)。
-
副驾车门模块:副驾侧LIN集群的主节点(另一个经理)。
-
副驾车窗电机:副驾侧LIN集群的一个从节点(另一个员工)。
-
步骤 1:用户输入(在主驾门板上按下开关)
-
你按下主驾门板上的“副驾车窗下降”开关。
-
这个开关本身是一个LIN从节点。它被按下后,会通过LIN总线向它的“经理”——主驾车门模块(主节点) 报告:“我被按下了,目标是下降副驾车窗”。
步骤 2:主驾侧LIN主节点处理指令并转换协议
-
主驾车门模块 收到来自开关的LIN消息。
-
它理解了这个指令:“需要控制副驾的车窗”。
-
它知道副驾车窗不属于自己部门管,需要跨部门协作。于是,它扮演起 “CAN网关” 的角色。
-
它将这个LIN指令“翻译”成一个标准的CAN报文。这个CAN报文会包含:
-
报文ID:例如
0x123,代表这是一个“车身控制指令”。 -
数据场:包含具体的信号,例如
Window_Control = RearRight_Down(假设副驾为右后)或Target_Position = 0%。
-
步骤 3:通过CAN总线进行跨域通信
-
主驾车门模块 将这个组装好的CAN报文发送到CAN总线上。
-
CAN总线是广播形式的,车上所有接入CAN总线的ECU(包括副驾车门模块)都收到了这条消息。
-
其他ECU(如仪表、BCM)可能也会看到这条消息,但它们发现与自己无关,于是忽略它。
-
副驾车门模块(副驾侧LIN集群的主节点)识别出这个报文ID和信号是发给自己的,于是它接收并解析这条消息。
步骤 4:副驾侧LIN主节点驱动执行器
-
副驾车门模块 解析出指令:“需要让本部门的车窗电机下降”。
-
它再将这个指令“翻译”成LIN总线的语言。
-
它通过LIN总线向它的“员工”——副驾车窗电机(LIN从节点) 发送具体的控制命令,例如:
Motor_Rotate_Forward(电机正转)。
步骤 5:最终执行与反馈(可选但重要)
-
副驾车窗电机 接收到LIN指令,开始转动,将车窗放下。
-
同时,电机可能内置位置传感器,它会通过LIN总线向副驾车门模块反馈当前状态,如“正在运行”或“已到达底部”。
-
副驾车门模块 可能会再次充当网关,将这个状态信息封装成一条CAN报文(例如
Window_Status = RearRight_FullyOpen)发送到CAN总线上。 -
主驾车门模块 接收到这个状态反馈后,可能会点亮开关上的指示灯或做出其他响应,让驾驶员知道指令已成功执行。
总结
这个过程的精髓在于协议转换和网络桥接:
-
LIN:用于局部、低成本、低速的控制(如开关、电机、传感器)。
-
CAN:用于全局、高可靠、高速的跨系统通信。
-
主节点:核心是网关,负责在LIN和CAN之间进行协议转换,实现了不同网络集群之间的信息互通。
正是这种分层、分布式的网络架构,使得现代汽车能够高效、可靠地实现复杂的车身控制功能。