算法笔记 12 哈希表 | 图
1 同一组数据用字典和哈希表的时空复杂度一样吗?
在大多数语境下(尤其是算法题中),“字典” 和 “哈希表” 本质上是同一种数据结构的不同称呼(哈希表是底层实现,字典是抽象概念),因此对同一组数据的操作,时空复杂度是一样的。
为什么容易混淆?
- “字典” 是一种抽象数据类型(ADT),描述的是 “通过键存储和访问值” 的功能(比如 Python 的
dict、C++ 的map/unordered_map都可以称为字典)。 - “哈希表” 是实现 “字典” 功能的一种底层数据结构(通过哈希函数映射键到内存地址,实现快速访问)。
在实际应用中:
- Python 的
dict、C++ 的unordered_map、Java 的HashMap,底层都是哈希表实现,因此它们的时空复杂度完全一致。 - 少数情况下,“字典” 可能用其他结构实现(比如 C++ 的
map用红黑树实现),但这是特例,此时它的复杂度和哈希表不同(红黑树是 O (log n),哈希表平均 O (1))。
哈希表(字典)的时空复杂度
对同一组数据(n 个键值对):
-
时间复杂度:
- 插入、查询、删除:平均 O (1)(哈希函数均匀时,直接定位到地址);
- 最坏 O (n)(哈希冲突严重,所有键映射到同一位置,退化为链表),但实际中通过优化哈希函数和扩容机制,几乎不会出现。
-
空间复杂度:
- 存储 n 个元素,需要额外空间存储哈希表结构(如桶数组、链表 / 红黑树节点),总空间复杂度为O(n)。
总结
如果 “字典” 是用哈希表实现的(绝大多数情况),那么对同一组数据的操作,时空复杂度和哈希表完全一致。
只有当 “字典” 用其他结构(如树)实现时,复杂度才会不同。
在算法题中,提到 “字典” 通常默认是哈希表实现,因此可以认为两者复杂度相同。
2 图
第 9 章 图 - Hello 算法
基于邻接矩阵表示图的实现代码(c语言实现)
/* 基于邻接矩阵实现的无向图结构体 */
typedef struct {int vertices[MAX_SIZE];int adjMat[MAX_SIZE][MAX_SIZE];int size;
} GraphAdjMat;/* 构造函数 */
GraphAdjMat *newGraphAdjMat() {GraphAdjMat *graph = (GraphAdjMat *)malloc(sizeof(GraphAdjMat));graph->size = 0;for (int i = 0; i < MAX_SIZE; i++) {for (int j = 0; j < MAX_SIZE; j++) {graph->adjMat[i][j] = 0;}}return graph;
}/* 析构函数 */
void delGraphAdjMat(GraphAdjMat *graph) {free(graph);
}/* 添加顶点 */
void addVertex(GraphAdjMat *graph, int val) {if (graph->size == MAX_SIZE) {fprintf(stderr, "图的顶点数量已达最大值\n");return;}// 添加第 n 个顶点,并将第 n 行和列置零int n = graph->size;graph->vertices[n] = val;for (int i = 0; i <= n; i++) {graph->adjMat[n][i] = graph->adjMat[i][n] = 0;}graph->size++;
}/* 删除顶点 */
void removeVertex(GraphAdjMat *graph, int index) {if (index < 0 || index >= graph->size) {fprintf(stderr, "顶点索引越界\n");return;}// 在顶点列表中移除索引 index 的顶点for (int i = index; i < graph->size - 1; i++) {graph->vertices[i] = graph->vertices[i + 1];}// 在邻接矩阵中删除索引 index 的行for (int i = index; i < graph->size - 1; i++) {for (int j = 0; j < graph->size; j++) {graph->adjMat[i][j] = graph->adjMat[i + 1][j];}}// 在邻接矩阵中删除索引 index 的列for (int i = 0; i < graph->size; i++) {for (int j = index; j < graph->size - 1; j++) {graph->adjMat[i][j] = graph->adjMat[i][j + 1];}}graph->size--;
}/* 添加边 */
// 参数 i, j 对应 vertices 元素索引
void addEdge(GraphAdjMat *graph, int i, int j) {if (i < 0 || j < 0 || i >= graph->size || j >= graph->size || i == j) {fprintf(stderr, "边索引越界或相等\n");return;}graph->adjMat[i][j] = 1;graph->adjMat[j][i] = 1;
}/* 删除边 */
// 参数 i, j 对应 vertices 元素索引
void removeEdge(GraphAdjMat *graph, int i, int j) {if (i < 0 || j < 0 || i >= graph->size || j >= graph->size || i == j) {fprintf(stderr, "边索引越界或相等\n");return;}graph->adjMat[i][j] = 0;graph->adjMat[j][i] = 0;
}/* 打印邻接矩阵 */
void printGraphAdjMat(GraphAdjMat *graph) {printf("顶点列表 = ");printArray(graph->vertices, graph->size);printf("邻接矩阵 =\n");for (int i = 0; i < graph->size; i++) {printArray(graph->adjMat[i], graph->size);}
}图 | 代码详细解释
一、为什么需要 “图” 这种数据结构?
我们已经学过数组、链表、树,它们能解决很多问题,但有个局限:只能表示 “一对一” 或 “一对多” 的关系。比如:
- 数组 / 链表:每个元素只和前后元素有关(一对一)
- 树:父节点和子节点是一对多
但现实中很多关系是 “多对多” 的:
- 社交网络:每个人可以和多个人是朋友(多对多)
- 地铁线路:每个站点可以连接多个站点(多对多)
这时候就需要图了 —— 它专门用来表示 “多对多” 的关系。
二、图的核心概念(用 “班级同学关系” 举例)
假设我们用图表示班级里的 “朋友关系”:
- 顶点(Vertex):每个同学就是一个顶点(比如小明、小红、小刚)
- 边(Edge):如果两个同学是朋友,就用一条边连接他们(比如小明 - 小红是朋友,就有一条边)
- 无向图:边没有方向(小明是小红的朋友,等价于小红是小明的朋友),你提供的代码实现的就是无向图
- 顶点的 “索引”:为了方便操作,给每个顶点编个号(比如小明 = 0,小红 = 1,小刚 = 2)
三、邻接矩阵:如何用代码存储图?
“邻接矩阵” 是存储图的最直观方式,本质是一个二维数组:
- 行索引 = 顶点 A 的编号
- 列索引 = 顶点 B 的编号
- 数组值 = 1(A 和 B 是朋友)或 0(不是朋友)
比如 3 个同学的关系:
- 小明(0)和小红(1)是朋友
- 小红(1)和小刚(2)是朋友
- 小明(0)和小刚(2)不是朋友
对应的邻接矩阵就是:
行\列 | 0(小明) | 1(小红) | 2(小刚)
---------------------------------------
0 | 0 | 1 | 0 (小明和自己不是朋友,和小红是朋友)
1 | 1 | 0 | 1 (小红和小明是朋友,和自己不是,和小刚是)
2 | 0 | 1 | 0 (小刚和小红是朋友)
注意:无向图的邻接矩阵是对称的(行和列交换后,值不变),因为 “小明 - 小红是朋友” 等价于 “小红 - 小明是朋友”。
四、逐行拆解代码:图的结构体和操作
1. 结构体定义(存储图的 “容器”)
typedef struct {int vertices[MAX_SIZE]; // 存储顶点的值(比如同学的名字用编号代替:0,1,2...)int adjMat[MAX_SIZE][MAX_SIZE]; // 邻接矩阵(存储边的关系)int size; // 当前图中顶点的实际数量(比如有3个同学,size=3)
} GraphAdjMat;
MAX_SIZE:提前定义的最大顶点数(比如 #define MAX_SIZE 10,表示最多存 10 个顶点)vertices:类似一个数组,vertices[0]就是 0 号顶点的值(比如小明的编号)adjMat:二维数组,adjMat[i][j]就是 i 号和 j 号顶点的关系(1 = 有边,0 = 无边)
2. 构造函数(创建一个空图)
GraphAdjMat *newGraphAdjMat() {GraphAdjMat *graph = (GraphAdjMat *)malloc(sizeof(GraphAdjMat)); // 申请内存graph->size = 0; // 初始时没有顶点,size=0// 初始化邻接矩阵:所有位置先设为0(一开始没有任何边)for (int i = 0; i < MAX_SIZE; i++) {for (int j = 0; j < MAX_SIZE; j++) {graph->adjMat[i][j] = 0;}}return graph;
}
作用:就像买了一个新的笔记本,里面的表格(邻接矩阵)全是空的(0),还没写任何顶点和关系。
3. 添加顶点(往图里加一个 “同学”)
void addVertex(GraphAdjMat *graph, int val) {if (graph->size == MAX_SIZE) { // 检查是否超过最大容量fprintf(stderr, "图的顶点数量已达最大值\n");return;}int n = graph->size; // 新顶点的索引是当前size(比如当前有2个顶点,新顶点索引是2)graph->vertices[n] = val; // 把新顶点的值存在vertices[n]// 初始化新顶点对应的行和列(和已有顶点都先设为0,还没边)for (int i = 0; i <= n; i++) {graph->adjMat[n][i] = 0; // 新顶点(行n)和所有已有顶点(列i)的边设为0graph->adjMat[i][n] = 0; // 已有顶点(行i)和新顶点(列n)的边设为0}graph->size++; // 顶点数量+1
}
举例:
- 初始 size=0,调用
addVertex(graph, 10)(添加顶点值 10):vertices[0] = 10,size 变成 1,邻接矩阵第 0 行第 0 列设为 0(自己和自己没边)。 - 再调用
addVertex(graph, 20):vertices[1] = 20,size 变成 2,邻接矩阵第 1 行第 0 列、第 0 行第 1 列都设为 0(暂时不是朋友)。
4. 添加边(给两个 “同学” 建立朋友关系)
void addEdge(GraphAdjMat *graph, int i, int j) {// 检查索引是否合法(不能越界,不能自己和自己建边)if (i < 0 || j < 0 || i >= graph->size || j >= graph->size || i == j) {fprintf(stderr, "边索引越界或相等\n");return;}graph->adjMat[i][j] = 1; // i和j有边graph->adjMat[j][i] = 1; // 无向图,j和i也有边(矩阵对称)
}
举例:
- 现在有两个顶点(索引 0 和 1),调用
addEdge(graph, 0, 1):adjMat[0][1] = 1,adjMat[1][0] = 1(表示 0 和 1 是朋友)。
5. 删除顶点(移除一个 “同学”)
这是最复杂的一步,需要同时删除顶点本身和它所有的边:
void removeVertex(GraphAdjMat *graph, int index) {if (index < 0 || index >= graph->size) { // 检查索引是否合法fprintf(stderr, "顶点索引越界\n");return;}// 1. 删除顶点列表中的index位置(把后面的顶点往前移)for (int i = index; i < graph->size - 1; i++) {graph->vertices[i] = graph->vertices[i + 1]; // 覆盖当前位置}// 2. 删除邻接矩阵中的index行(把后面的行往上移)for (int i = index; i < graph->size - 1; i++) {for (int j = 0; j < graph->size; j++) {graph->adjMat[i][j] = graph->adjMat[i + 1][j]; // 用下一行覆盖当前行}}// 3. 删除邻接矩阵中的index列(把后面的列往左移)for (int i = 0; i < graph->size; i++) {for (int j = index; j < graph->size - 1; j++) {graph->adjMat[i][j] = graph->adjMat[i][j + 1]; // 用下一列覆盖当前列}}graph->size--; // 顶点数量-1
}
举例:
- 现在有 3 个顶点(0,1,2),删除索引 1 的顶点:
vertices数组:原本[10,20,30]→ 变成[10,30](20 被移除,后面的 30 前移)。- 邻接矩阵的行:第 1 行被第 2 行覆盖,原本 3 行→变成 2 行。
- 邻接矩阵的列:第 1 列被第 2 列覆盖,原本 3 列→变成 2 列。
6. 删除边(解除两个 “同学” 的朋友关系)
void removeEdge(GraphAdjMat *graph, int i, int j) {// 检查索引合法性(和addEdge一样)if (i < 0 || j < 0 || i >= graph->size || j >= graph->size || i == j) {fprintf(stderr, "边索引越界或相等\n");return;}graph->adjMat[i][j] = 0; // 移除i和j的边graph->adjMat[j][i] = 0; // 无向图,对称移除
}
五、动手实验:用代码模拟 “同学关系”
写一个main函数,一步步操作,观察输出:
#include <stdio.h>
#include <stdlib.h>
#define MAX_SIZE 10 // 假设最多10个顶点// (这里粘贴上面的结构体和所有函数)// 辅助函数:打印数组(代码中用到的printArray)
void printArray(int arr[], int size) {printf("[");for (int i = 0; i < size; i++) {printf("%d", arr[i]);if (i < size - 1) printf(", ");}printf("]\n");
}int main() {// 1. 创建空图GraphAdjMat *graph = newGraphAdjMat();printf("初始图(无顶点):\n");printGraphAdjMat(graph); // 顶点列表为空,邻接矩阵也为空// 2. 添加3个顶点(小明=10,小红=20,小刚=30)addVertex(graph, 10);addVertex(graph, 20);addVertex(graph, 30);printf("\n添加3个顶点后:\n");printGraphAdjMat(graph); // 顶点列表[10,20,30],邻接矩阵全0// 3. 添加边:小明-小红(0-1)、小红-小刚(1-2)addEdge(graph, 0, 1);addEdge(graph, 1, 2);printf("\n添加边后:\n");printGraphAdjMat(graph); // 邻接矩阵中(0,1),(1,0),(1,2),(2,1)为1// 4. 删除顶点小红(索引1)removeVertex(graph, 1);printf("\n删除小红后:\n");printGraphAdjMat(graph); // 顶点列表[10,30],邻接矩阵变为2x2(小红的边全被删除)// 5. 释放内存delGraphAdjMat(graph);return 0;
}
运行后,你会看到每一步操作对 “顶点列表” 和 “邻接矩阵” 的影响,这比单纯看代码更容易理解。
六、总结:关键是理解 “映射关系”
- 顶点列表
vertices[i]→ 第 i 个顶点的值(是什么) - 邻接矩阵
adjMat[i][j]→ 第 i 个和第 j 个顶点的关系(有没有边) - 所有操作(增删顶点 / 边)都是在维护这两个数组的一致性
3 邻接表的实现方式
要对比邻接矩阵,我们来用 C/C++ 实现邻接表(链表版)和邻接表(哈希表版),并分析它们的特性。
一、邻接表(链表版)实现
邻接表的核心是为每个顶点维护一个链表,存储其直接相连的顶点。
cpp
#include <iostream>
#include <vector>
using namespace std;// 邻接表(链表版)结构体
struct GraphAdjList {vector<vector<int>> adj; // 每个顶点的邻接链表,adj[i] 存储与 i 直接相连的顶点int size; // 顶点数量// 构造函数:初始化 n 个顶点GraphAdjList(int n) {size = n;adj.resize(n);}// 添加边:无向图,i 和 j 互相添加到邻接链表void addEdge(int i, int j) {if (i < 0 || i >= size || j < 0 || j >= size || i == j) {cerr << "边索引越界或相等" << endl;return;}adj[i].push_back(j);adj[j].push_back(i);}// 删除边:在 i 和 j 的邻接链表中移除对方void removeEdge(int i, int j) {if (i < 0 || i >= size || j < 0 || j >= size || i == j) {cerr << "边索引越界或相等" << endl;return;}// 从 i 的邻接链表中删除 jfor (auto it = adj[i].begin(); it != adj[i].end(); ++it) {if (*it == j) {adj[i].erase(it);break;}}// 从 j 的邻接链表中删除 ifor (auto it = adj[j].begin(); it != adj[j].end(); ++it) {if (*it == i) {adj[j].erase(it);break;}}}// 添加顶点:需要重新分配空间(实际工程中一般提前预留,这里简化演示)void addVertex() {adj.push_back(vector<int>());size++;}// 删除顶点:需要删除该顶点的邻接链表,并在所有其他顶点的链表中移除它void removeVertex(int index) {if (index < 0 || index >= size) {cerr << "顶点索引越界" << endl;return;}// 1. 删除该顶点的邻接链表adj.erase(adj.begin() + index);// 2. 在所有其他顶点的邻接链表中移除该顶点for (int i = 0; i < size - 1; ++i) {for (auto it = adj[i].begin(); it != adj[i].end(); ) {if (*it == index) {it = adj[i].erase(it);} else {// 若邻接顶点的索引大于 index,需要减 1(因为顶点 index 被删除了)if (*it > index) {(*it)--;}++it;}}}size--;}// 打印邻接表void print() {for (int i = 0; i < size; ++i) {cout << "顶点 " << i << " 的邻接顶点:";for (int j : adj[i]) {cout << j << " ";}cout << endl;}}
};
二、邻接表(哈希表版)实现
用哈希表(unordered_map)替代链表,能将 “查找邻接顶点” 的时间复杂度优化到 (O(1))。
cpp
#include <iostream>
#include <unordered_map>
#include <vector>
using namespace std;// 邻接表(哈希表版)结构体
struct GraphAdjHash {unordered_map<int, unordered_set<int>> adj; // key:顶点,value:该顶点的邻接顶点集合(哈希表)int size; // 顶点数量// 构造函数:初始化 n 个顶点GraphAdjHash(int n) {size = n;for (int i = 0; i < n; ++i) {adj[i] = unordered_set<int>();}}// 添加边:无向图,i 和 j 互相添加到邻接集合void addEdge(int i, int j) {if (i < 0 || i >= size || j < 0 || j >= size || i == j) {cerr << "边索引越界或相等" << endl;return;}adj[i].insert(j);adj[j].insert(i);}// 删除边:在 i 和 j 的邻接集合中移除对方void removeEdge(int i, int j) {if (i < 0 || i >= size || j < 0 || j >= size || i == j) {cerr << "边索引越界或相等" << endl;return;}adj[i].erase(j);adj[j].erase(i);}// 添加顶点void addVertex() {adj[size] = unordered_set<int>();size++;}// 删除顶点:删除该顶点的邻接集合,并在所有其他顶点的集合中移除它void removeVertex(int index) {if (index < 0 || index >= size) {cerr << "顶点索引越界" << endl;return;}// 1. 删除该顶点的邻接集合adj.erase(index);// 2. 在所有其他顶点的邻接集合中移除该顶点for (auto& [v, neighbors] : adj) {neighbors.erase(index);}size--;}// 打印邻接表void print() {for (auto& [v, neighbors] : adj) {cout << "顶点 " << v << " 的邻接顶点:";for (int n : neighbors) {cout << n << " ";}cout << endl;}}
};
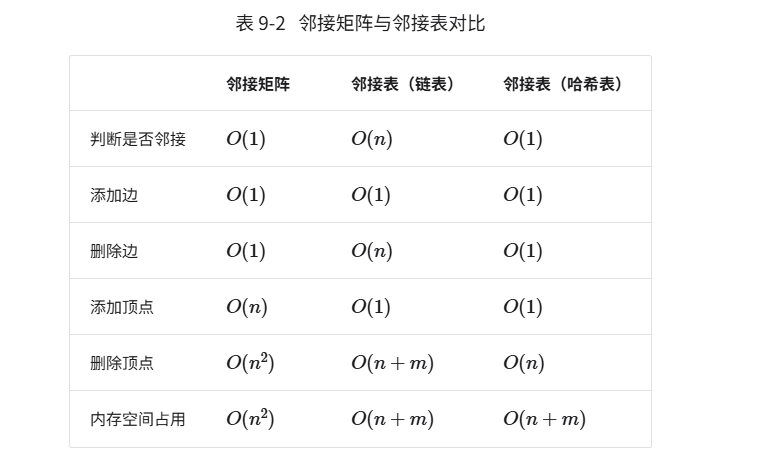
三、三种实现的核心对比(结合你提供的表格)
| 操作 | 邻接矩阵 (时间复杂度) | 邻接表 (链表版) | 邻接表 (哈希表版) | 说明 |
|---|---|---|---|---|
| 判断是否邻接 | (O(1)) | (O(n)) | (O(1)) | 邻接矩阵直接查adjMat[i][j];链表需遍历链表;哈希表直接查集合 |
| 添加边 | (O(1)) | (O(1)) | (O(1)) | 矩阵改一个值;链表 / 哈希表添加到邻接结构 |
| 删除边 | (O(1)) | (O(n)) | (O(1)) | 矩阵改一个值;链表需遍历找节点;哈希表直接删除集合元素 |
| 添加顶点 | (O(n^2)) | (O(1)) | (O(1)) | 邻接矩阵需初始化新的行和列;链表 / 哈希表只需新增一个空结构 |
| 删除顶点 | (O(n^2)) | (O(n+m)) | (O(n)) | 邻接矩阵需移动所有行和列;链表需处理所有邻接链表;哈希表删除键后遍历所有集合 |
| 内存空间占用 | (O(n^2)) | (O(n+m)) | (O(n+m)) | n 是顶点数,m 是边数;矩阵是固定二维数组,邻接表只存实际边 |
四、如何选择?
- 邻接矩阵:适合顶点数少、边数多的 “稠密图”(比如完全图),优点是实现简单、判断邻接极快。
- 邻接表(链表版):适合顶点数多、边数少的 “稀疏图”,内存更高效,但查找邻接顶点较慢。
- 邻接表(哈希表版):在链表版的基础上优化了 “查找 / 删除邻接顶点” 的效率,是工程中更实用的选择。
4 图的重点回顾
1. “图由顶点和边组成,可以表示为一组顶点和一组边构成的集合。”
- 顶点:就是 “点”,比如社交网络里的 “人”、地铁图里的 “站点”。
- 边:就是连接顶点的 “线”,表示顶点之间的关系,比如 “朋友关系”“地铁线路”。
- 例子:把你、我、他看成三个顶点,“是朋友” 看成边,那么 “图” 就是 {你,我,他}(顶点集合) + {你 - 我,我 - 他}(边集合)。
2. “相较于线性关系(链表)和分治关系(树),网络关系(图)具有更高的自由度,因而更为复杂。”
- 线性结构(链表):元素是 “一对一” 的,比如链表的每个节点只有一个前驱、一个后继。
- 分治结构(树):元素是 “一对多” 的,比如树的父节点可以有多个子节点,但子节点只有一个父节点。
- 图(网络结构):元素是 “多对多” 的,一个顶点可以和任意多个顶点相连,所以关系更自由、更复杂。
3. “有向图的边具有方向性,连通图中的任意顶点均可达,有权图的每条边都包含权重变量。”
- 有向图:边是有方向的,比如 “微博关注”(我关注你,你不一定关注我),边要画箭头。
- 连通图:图里任意两个顶点,都能通过边 “走通”,比如一个没有孤岛的地铁网。
- 有权图:边带有 “权重”(可以理解为 “成本” 或 “距离”),比如地图里的 “两点间距离”“打车费用”。
4. “邻接矩阵利用矩阵来表示图,每一行(列)代表一个顶点,矩阵元素代表边,用 1 或 0 表示两个顶点之间有边或无边。邻接矩阵在增删查改操作上效率很高,但空间占用较多。”
- 邻接矩阵是一个二维数组:行和列都是顶点,
matrix[i][j] = 1表示顶点i和j有边,0表示无边。 - 效率高:判断 “两个顶点是否相连” 只要看数组里的一个值(时间复杂度 (O(1)));添加 / 删除边也只要改一个值。
- 空间占用多:如果有
n个顶点,矩阵是n×n的,哪怕边很少(比如稀疏图),也得占n²的空间。
5. “邻接表使用多个链表来表示图,第 i 个链表对应顶点 i,其中存储了该顶点的所有邻接顶点。邻接表相对于邻接矩阵更加节省空间,但由于需要遍历链表来查找边,因此时间效率较低。”
- 邻接表是 “顶点→链表” 的结构:每个顶点对应一个链表,链表存的是和它直接相连的顶点。
- 节省空间:如果有
n个顶点、m条边,邻接表只需要存n + m的空间(每个顶点一个链表,每条边存两次,因为无向图)。 - 时间效率低:判断 “顶点 i 和 j 是否相连”,需要遍历顶点
i的链表找j,最坏情况要遍历整个链表(时间复杂度 (O(n)) )。
6. “当邻接表中的链表过长时,可将其转换为红黑树或哈希表,从而提升查询效率。”
- 链表的缺点是 “查找慢”,所以可以把 “链表” 换成红黑树(有序,查找时间\(O(log n)\))或哈希表(查找时间\(O(1)\)),这样查邻接顶点就快了,这就是你之前问的 “哈希表版邻接表”~
7. “从算法思想的角度分析,邻接矩阵体现了‘以空间换时间’,邻接表体现了‘以时间换空间’。”
- 邻接矩阵:用 “大空间”((n²)的矩阵)换 “快时间”(增删查改(O(1)))。
- 邻接表:用 “小空间”((n+m))换 “慢时间”(查找(O(n))或(O(log n)))。
8. “图可用于建模各类现实系统,如社交网络、地铁线路等。”
- 社交网络:顶点 = 用户,边 = 好友关系。
- 地铁线路:顶点 = 站点,边 = 地铁线,权重 = 站数 / 时间。
- 还有:电路(顶点 = 元件,边 = 导线)、网页链接(顶点 = 网页,边 = 超链接)……
9. “树是图的一种特例,树的遍历也是图的遍历的一种特例。”
- 树:是 “没有环的连通无向图”(比如家族树,每个节点只有一个父节点,没有循环)。
- 所以树的 “前序、中序、后序遍历” 其实是图的 “深度优先遍历(DFS)” 的特例;树的 “层序遍历” 是图的 “广度优先遍历(BFS)” 的特例。
10. “图的广度优先遍历是一种由近及远、层层扩张的搜索方式,通常借助队列实现。”
- 想象 “水波扩散”:先访问起点,再访问起点的所有邻居,再访问邻居的邻居……
- 实现:用队列,把顶点 “入队→访问→把邻居入队”,循环直到队空。
11. “图的深度优先遍历是一种优先走到底、无路可走时再回溯的搜索方式,常基于递归来实现。”
- 想象 “走迷宫”:沿着一条路走到头,没路了就回到上一个岔口走另一条……
- 实现:递归(或栈),访问顶点→递归访问它的邻居(没访问过的)。