【07】特征匹配算法:ORB算法深度解析与实现
一、引言
在计算机视觉领域,特征检测与匹配是目标跟踪、SLAM、图像拼接等任务的核心基础。ORB(Oriented FAST and Rotated BRIEF)算法作为OpenCV中的明星工具,由Ethan Rublee等人于2011年提出,完美融合了FAST关键点检测的速度优势与BRIEF描述符的简洁特性,并通过创新改进解决了两者的固有缺陷,成为SIFT、SURF等专利算法的免费替代方案,尤其适用于实时场景。本文将从原理、实现、调优三个维度全面拆解ORB,助力理解其在实际项目中的应用逻辑。
二、ORB算法的核心原理
ORB的核心是**Oriented FAST(带方向的FAST关键点检测)与Rotated BRIEF(旋转的BRIEF描述符)**的组合,前者解决"在哪里找特征"的问题,后者解决"如何描述特征"的问题。
1. Oriented FAST:让关键点拥有尺度与旋转不变性
FAST(Features from Accelerated Segment Test)是ORB的基础——一种快速角点检测算法,其核心逻辑是:若一个像素与周围足够多的邻域像素存在显著灰度差异,则该像素为关键点。具体步骤如下:
- 以目标像素
p为中心,取半径为3的圆上16个邻域像素(标记为p1-p16); - 设
p的灰度值为Ip,定义阈值T(通常为Ip的10%-30%); - 若存在连续9个及以上邻域像素满足
I > Ip+T或I < Ip-T,则p被判定为关键点。
FAST的优势是速度极快(可跳过非候选像素),但存在两大致命缺陷:
- 无尺度不变性:无法处理图像缩放导致的特征尺寸变化(比如同一物体缩小后,原关键点可能不再被检测到);
- 无旋转不变性:对图像旋转敏感(同一特征旋转后,邻域像素的灰度关系被破坏,导致误判)。
ORB通过两项关键改进解决了这些问题:
(1)尺度不变性:图像金字塔
ORB通过构建多层图像金字塔,在不同尺度的图像上独立检测FAST关键点,从而覆盖不同大小的特征:
- 对原始图像进行下采样(比如缩放因子
scaleFactor=1.2),生成nlevels层金字塔(层数越多,尺度覆盖越全); - 在每层图像上检测FAST关键点,不同层的关键点对应不同尺度的特征;
- 将各层关键点映射回原始图像尺度,实现跨尺度的特征匹配。
(2)旋转不变性:灰度质心法
为每个关键点分配主方向,让描述符能适应图像旋转。计算步骤如下:
- 在关键点周围定义一个
31×31的邻域窗口; - 计算窗口内的灰度质心(灰度加权的几何中心):
Cx=∑x⋅I(x,y)∑I(x,y),Cy=∑y⋅I(x,y)∑I(x,y) Cx = \frac{\sum x \cdot I(x,y)}{\sum I(x,y)}, \quad Cy = \frac{\sum y \cdot I(x,y)}{\sum I(x,y)} Cx=∑I(x,y)∑x⋅I(x,y),Cy=∑I(x,y)∑y⋅I(x,y)
其中I(x,y)是像素(x,y)的灰度值; - 关键点中心
(Ox,Oy)到质心(Cx,Cy)的向量方向即为主方向:
θ=arctan2(Cy−Oy,Cx−Ox) \theta = \arctan2(Cy - Oy, Cx - Ox) θ=arctan2(Cy−Oy,Cx−Ox)
2. Rotated BRIEF:让描述符更鲁棒
BRIEF(Binary Robust Independent Elementary Features)是一种二进制描述符,其核心是通过比较关键点邻域内的随机点对灰度值,生成一串0/1二进制串(默认256位)。具体步骤:
- 在关键点周围定义一个
S×S的正方形窗口; - 随机选择
N对像素点(p_i, q_i)(比如256对); - 对每对点,若
I(p_i) > I(q_i)则记为1,否则记为0,最终生成N位二进制串。
BRIEF的优势是计算快、存储小(256位仅占32字节),但同样存在缺陷:
- 无旋转不变性:窗口固定,图像旋转后点对的位置关系被破坏,描述符失效;
- 对噪声敏感:随机点对可能包含噪声像素,导致描述符稳定性差。
ORB对BRIEF的改进同样针对这两个问题:
(1)旋转不变性:方向对齐
利用Oriented FAST计算的主方向θ,对BRIEF的采样窗口进行旋转,让点对分布始终与关键点方向一致。旋转矩阵为:
R(θ)=[cosθ−sinθsinθcosθ]
R(\theta) = \begin{bmatrix} \cos\theta & -\sin\theta \\ \sin\theta & \cos\theta \end{bmatrix}
R(θ)=[cosθsinθ−sinθcosθ]
通过该矩阵将原始点对(p_i, q_i)旋转到主方向上,确保图像旋转后描述符的一致性。
(2)稳定性优化:rBRIEF
ORB没有使用随机点对,而是通过统计学习从大量训练图像中筛选出鲁棒性最强的256对点(称为rBRIEF)。这些点对在图像旋转、噪声干扰下仍能保持稳定,显著提升了描述符的区分能力。
三、ORB与传统算法的性能对比
为了更直观理解ORB的优势,我们将其与SIFT、SURF(传统特征算法的代表)进行对比:
| **特性** | **ORB** | **SIFT** | **SURF** |
|---|---|---|---|
| 速度 | 极快(实时性) | 较慢 | 中等 |
| 旋转不变性 | 支持(灰度质心法) | 支持(图像金字塔+方向) | 支持(海森矩阵+方向) |
| 尺度不变性 | 支持(图像金字塔) | 支持(图像金字塔) | 支持(图像金字塔) |
| 描述符类型 | 二进制(32字节) | 浮点型(128字节) | 浮点型(64/128字节) |
| 专利限制 | 无(免费商用) | 有(需授权) | 有(需授权) |
| 光照鲁棒性 | 较好 | 好 | 好 |
| 噪声鲁棒性 | 中等 | 好 | 好 |
结论:ORB的核心优势是速度快、无专利、存储小,尤其适合实时场景(如无人机跟踪、SLAM);而SIFT/SURF在噪声鲁棒性上更优,但因专利和速度问题,工业界应用逐渐被ORB替代。
四、OpenCV中的ORB Python实现
OpenCV对ORB算法进行了高度封装,以下是完整的Python实现示例,涵盖关键点检测、描述符计算、特征匹配与可视化:
1. 环境准备
需安装OpenCV-Python库:
pip install opencv-python
2. 完整代码实现
import cv2def main():# 1. 读取图像(灰度模式)img1 = cv2.imread("images/im1.png", cv2.IMREAD_GRAYSCALE)img2 = cv2.imread("images/im2.png", cv2.IMREAD_GRAYSCALE)if img1 is None or img2 is None:print("Error: 无法读取图像,请检查路径!")return# 2. 初始化ORB检测器orb = cv2.ORB_create(nfeatures=1000, # 最大特征点数量scaleFactor=1.2, # 金字塔缩放因子nlevels=8, # 金字塔层数edgeThreshold=31, # 边缘阈值(避免检测边缘点)scoreType=cv2.ORB_HARRIS_SCORE, # 评分类型(HARRIS更均匀)patchSize=31 # 描述符采样窗口大小)# 3. 检测关键点并计算描述符kp1, des1 = orb.detectAndCompute(img1, None)kp2, des2 = orb.detectAndCompute(img2, None)print(f"图像1检测到{len(kp1)}个关键点")print(f"图像2检测到{len(kp2)}个关键点")# 4. 特征匹配(暴力匹配器,适合二进制描述符)matcher = cv2.BFMatcher(cv2.NORM_HAMMING, crossCheck=True) # crossCheck确保双向匹配matches = matcher.match(des1, des2)# 5. 筛选优质匹配(按汉明距离排序,取前100个)matches = sorted(matches, key=lambda x: x.distance)good_matches = matches[:min(100, len(matches))]# 6. 绘制匹配结果display_img = cv2.drawMatches(img1, kp1, img2, kp2, good_matches, None,flags=cv2.DrawMatchesFlags_NOT_DRAW_SINGLE_POINTS # 不绘制单个点)cv2.imshow("display", display_img )cv2.waitKey(0)cv2.destroyAllWindows()if __name__ == "__main__":main()
3. 代码解析
- 图像读取:使用
cv2.IMREAD_GRAYSCALE以灰度模式加载图像(特征检测对颜色不敏感,灰度图可减少计算量); - ORB初始化:
cv2.ORB_create()的参数可根据场景调整(比如nfeatures控制特征点数量,scaleFactor影响尺度覆盖); - 关键点与描述符:
detectAndCompute()同时完成关键点检测与描述符计算,返回kp(含位置、尺度、方向的关键点列表)和des(描述符矩阵,每行对应一个关键点的256位二进制串); - 特征匹配:
BFMatcher采用暴力匹配,cv2.NORM_HAMMING是二进制描述符的专用距离度量(汉明距离:不同位的数量),crossCheck=True确保匹配的双向有效性(A→B且B→A才视为有效); - 结果筛选:按汉明距离排序,保留前100个最匹配的点对(减少误匹配);
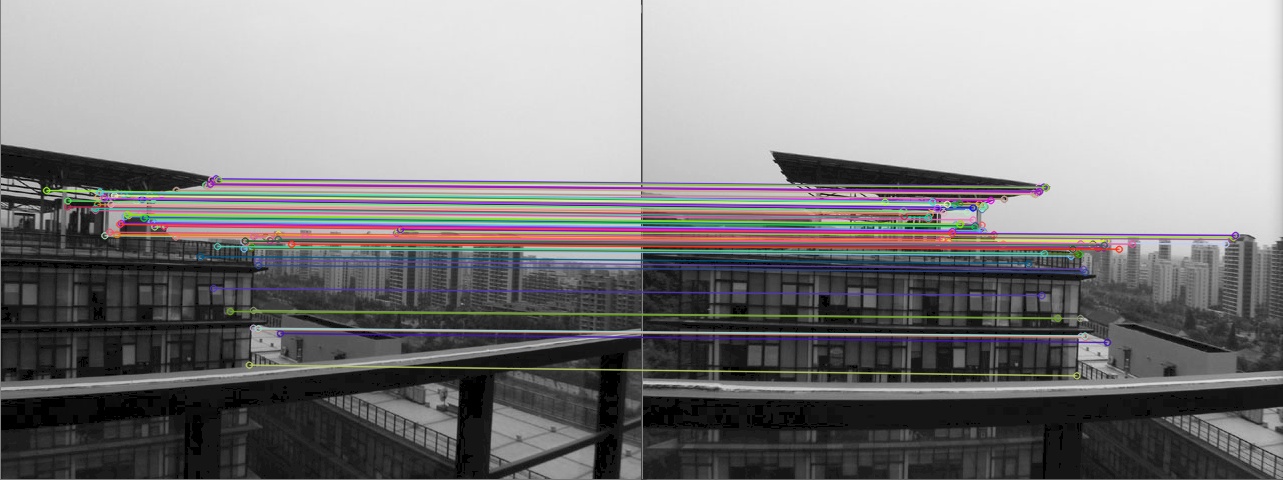
- 可视化:
cv2.drawMatches()将两张图像的匹配对绘制在同一张图中,直观展示特征对应关系;mouse_wheel_callback实现鼠标滚轮缩放,方便查看细节。
五、ORB参数调优技巧
ORB的性能高度依赖参数设置,以下是关键参数的调优建议:
| **参数** | **作用** | **调优建议** |
|---|---|---|
| `nfeatures` | 最大特征点数量 | 纹理丰富的图像:增大(如2000);实时场景:减小(如500) |
| `scaleFactor` | 金字塔层间缩放因子 | 需覆盖更多尺度:取1.1(层数需增加);追求速度:取1.5(层数减少) |
| `edgeThreshold` | 边缘阈值(避免检测边缘点) | 应略大于`patchSize`(如`patchSize=31`时,`edgeThreshold=31`) |
| `scoreType` | 关键点评分类型(`ORB_HARRIS_SCORE`/`ORB_FAST_SCORE`) | 需均匀分布:选`ORB_HARRIS_SCORE`;追求速度:选`ORB_FAST_SCORE` |
| `patchSize` | 描述符采样窗口大小 | 噪声大的图像:增大(如40);小目标/高分辨率:减小(如20) |
六、应用场景与优化策略
1. 典型应用场景
- 实时目标跟踪:ORB的速度优势使其适合无人机追踪、视频监控等实时任务;
- SLAM(同步定位与地图构建):ORB-SLAM系列算法(如ORB-SLAM3)基于ORB实现实时定位与地图构建;
- 图像拼接:通过匹配ORB特征,将多幅图像拼接成全景图;
- 目标识别:结合ORB特征与SVM、随机森林等分类器,实现快速目标识别。
2. 优化策略
- 误匹配去除:使用RANSAC算法剔除误匹配(通过计算单应矩阵筛选内点):
# 从优质匹配中提取点坐标 pts1 = np.float32([kp1[m.queryIdx].pt for m in good_matches]).reshape(-1, 1, 2) pts2 = np.float32([kp2[m.trainIdx].pt for m in good_matches]).reshape(-1, 1, 2)# 计算单应矩阵(RANSAC去除外点) H, inliers = cv2.findHomography(pts1, pts2, cv2.RANSAC, 5.0)# 保留内点匹配 ransac_matches = [good_matches[i] for i in range(len(good_matches)) if inliers[i]] - 多线程加速:OpenCV默认启用多线程优化,可通过以下代码强化:
cv2.setUseOptimized(True) # 启用优化 cv2.setNumThreads(4) # 设置线程数(根据CPU核心数调整) - 特征点筛选:通过
kp.response(关键点响应值,越高表示越可能是角点)筛选高置信度关键点:# 保留响应值前50%的关键点 kp1 = sorted(kp1, key=lambda x: x.response, reverse=True)[:int(len(kp1)*0.5)]
七、总结
ORB算法通过Oriented FAST解决了FAST的尺度与旋转问题,通过Rotated BRIEF解决了BRIEF的鲁棒性问题,最终实现了速度快、无专利、存储小的特征检测与描述方案。无论是实时跟踪、SLAM还是图像拼接,ORB都是计算机视觉工程师的"瑞士军刀"——只需合理调参与优化,就能满足大多数场景的需求。
随着实时计算机视觉的普及(如自动驾驶、无人机),ORB的价值将愈发凸显。掌握其原理与实现,将为你的项目带来更高效的特征处理能力。