Diffusion VS Flow Matching
目录
Diffusion
前向过程
逆向过程
优化目标
DDIM
前向过程
逆向过程
Flow Matching
训练
推理
在生成模型领域,Diffusion 和Flow Matching是两种重要的生成方法,它们在建模数据分布和样本生成上有不同的技术路径。
Flow Matching 和Diffusion是很像的,很多时候是等价的。比如,Flow Matching使用Euler的采样等价于使用DDIM采样器的Diffusion。

Diffusion

前向过程
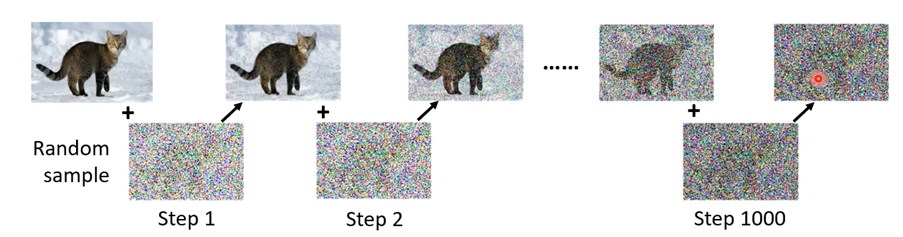
前向过程是加噪的过程,从𝑥0 到 𝑥𝑇 ,逐步加噪至一组纯噪声图片。添加的噪声是已知的{𝛽1,𝛽2,...,𝛽𝑇},不同的t,不同的噪声,且随着t的增加逐渐增大,满足𝛽1<𝛽2<...<𝛽𝑇。
前向过程中图像𝑥𝑡只和上一时刻的𝑥𝑡−1有关, 该过程可以视为马尔科夫过程, 满足:
![]()
q(𝑥1:𝑇|𝑥0)表示从原始图像 𝑥10 开始,经过 𝑇步加噪过程后得到噪声图像 𝑥𝑇 的概率分布。q(𝑥𝑡|𝑥𝑡−1)是条件概率分布,已知𝑥𝑡−1,得到𝑥𝑡的概率分布,这是一个高斯分布,其均值为 ![]() ,方差为
,方差为![]() 。
。
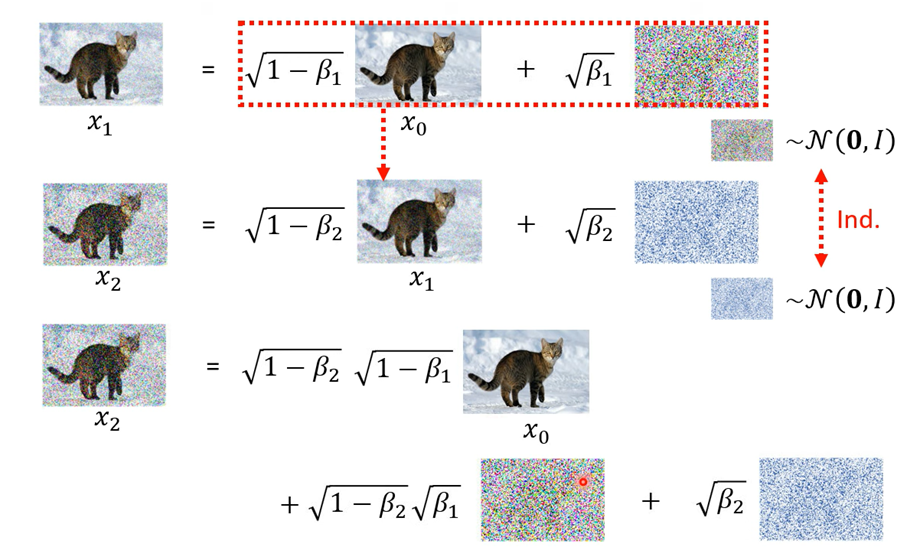
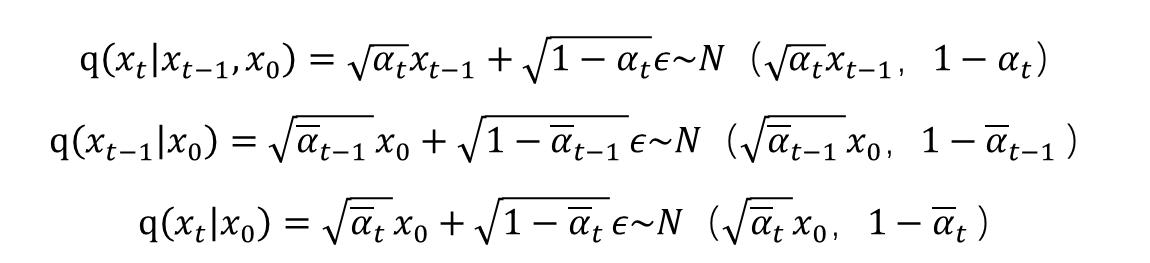
因为不同时间步的高斯分布是独立同分布的,所以可以进行合并。即加噪过程,只需要一步就可以道第 t 步加噪后的𝑥𝑡的概率分布。
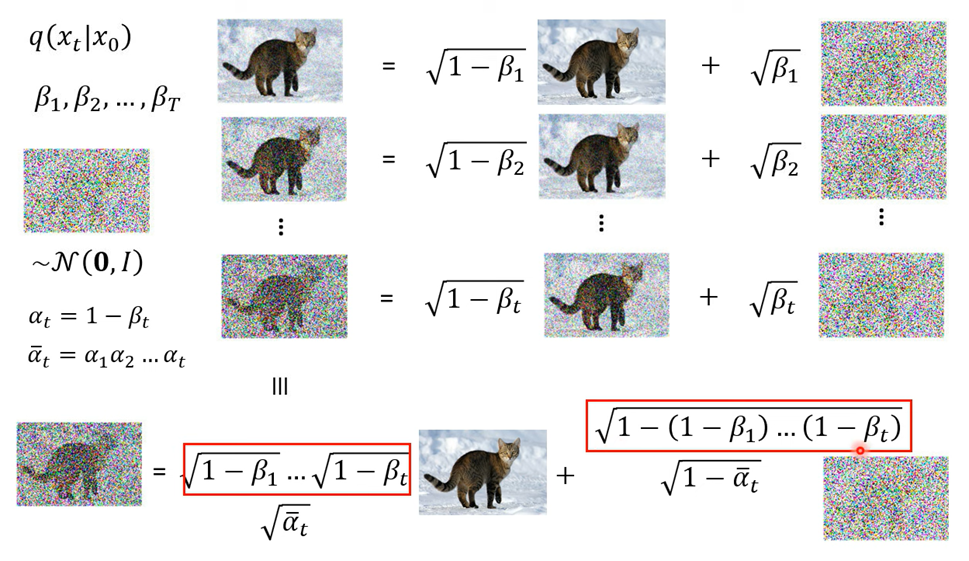
则可到q(𝑥𝑡|𝑥0)的条件概率分布:
![]()
![]()
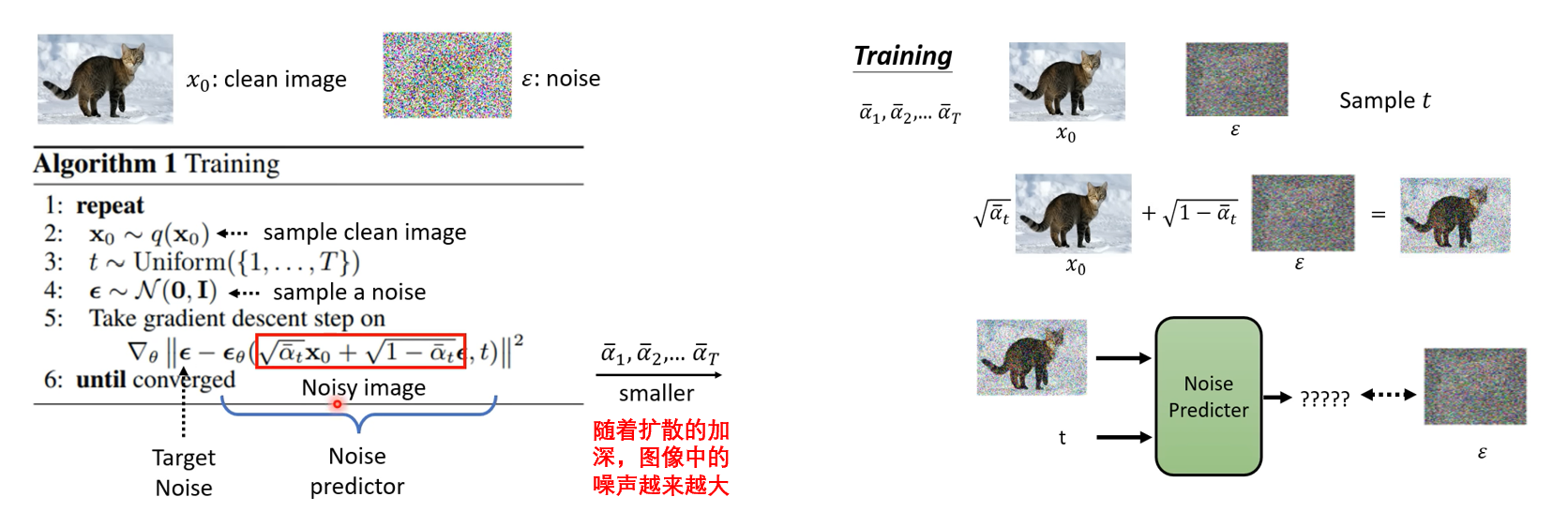
前向过程的伪代码如下:
逆向过程
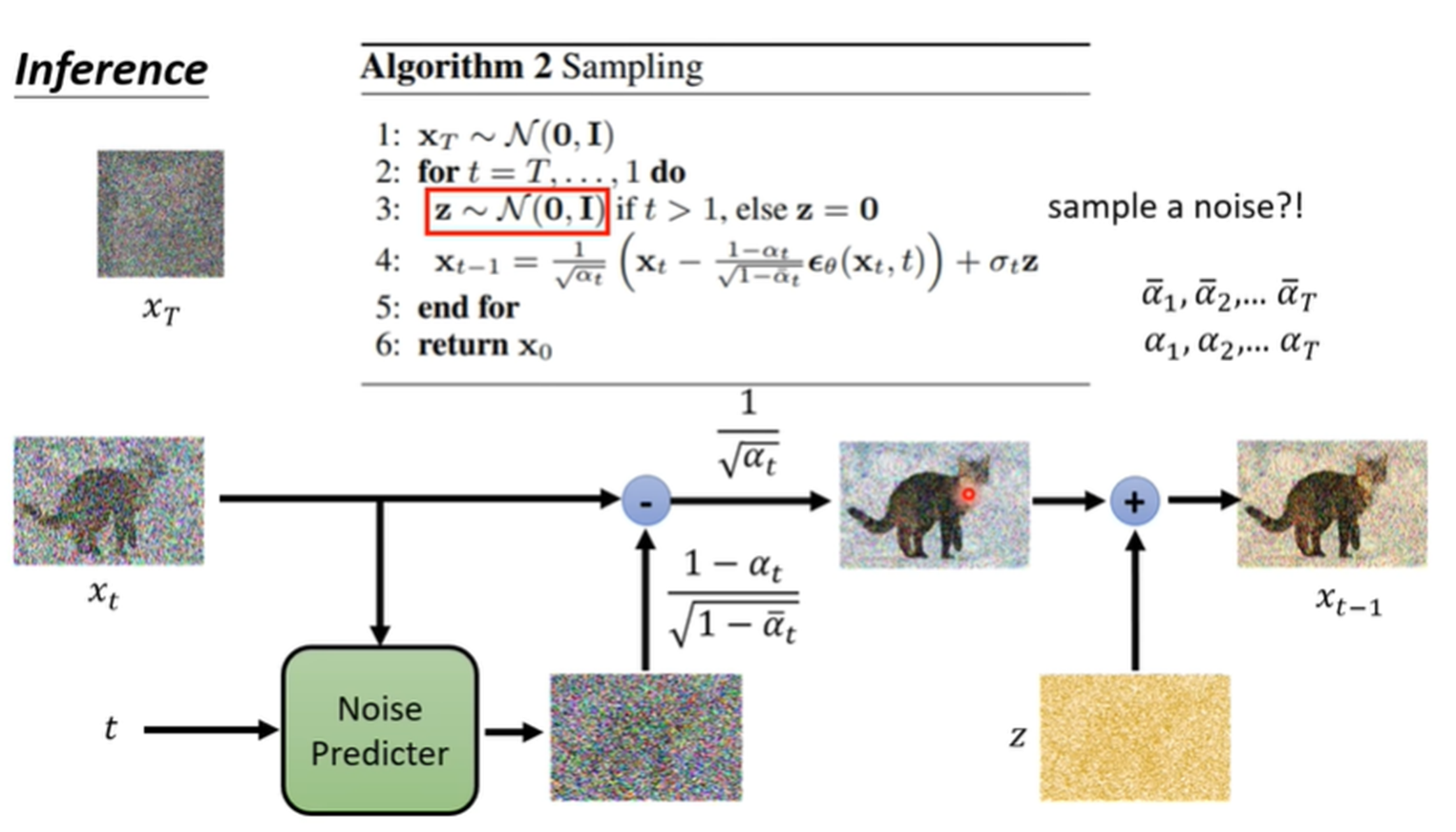
逆向过程是去噪的过程,𝑥𝑇是随机噪声:
![]()
逆向过程是一个从𝑝(𝑥𝑇)开始的马尔科夫链,DDPM使用模型𝑝𝜃(𝑥𝑡|𝑥𝑡−1)来拟合逆向过程:
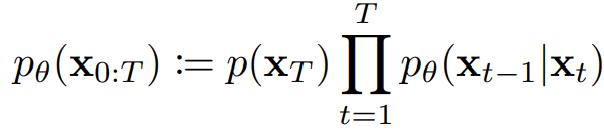
![]()
![]() 是一个不参与训练的,与时间相关的常数,实验 证明
是一个不参与训练的,与时间相关的常数,实验 证明![]() 和
和![]() 的结果是类似的。
的结果是类似的。
![]()
如果知道𝑝𝜃(𝑥𝑡-1|𝑥𝑡),就可以从𝑥𝑇开始,逐步还原出图像𝑥0。但是𝑝𝜃(𝑥𝑡-1|𝑥𝑡)无法直接得到,但是可以借助贝叶斯公式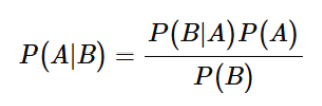 得到。
得到。

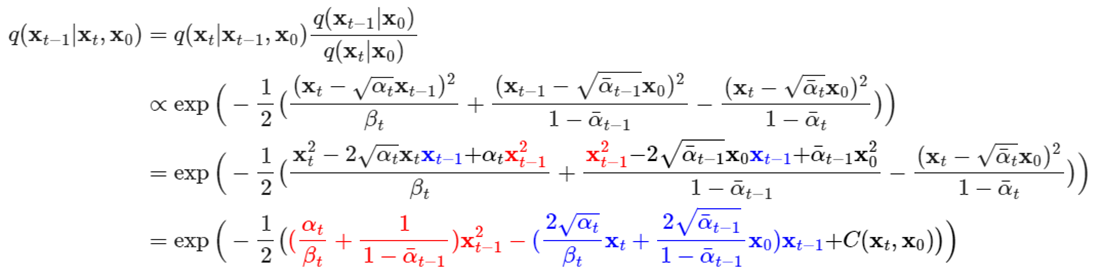
由前向过程的推到可得
正态分布中的相乘就是指数的相加,相除就是指数的相减,所以可以化简为:
从而,可以得到均值和方差:

![]()
![]()
方差是固定值,均值是与𝑥t和𝑥0相关,在反向传播中,𝑥0是未知的,但是利用前向过程的推导公式

所以均值可以化简为:
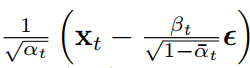
DDPM是训练一个只和 𝑥t 有关的神经网络 𝜖𝜃(𝑥𝑡,𝑡)来代替 𝜖,那么 q(𝑥𝑡−1|𝑥𝑡,𝑥0) 就会退化为𝑝𝜃(𝑥𝑡-1|𝑥𝑡) 。

![]()
![]()
因为αt := 1 - βt,所以:
优化目标
训练是优化负对数似然:

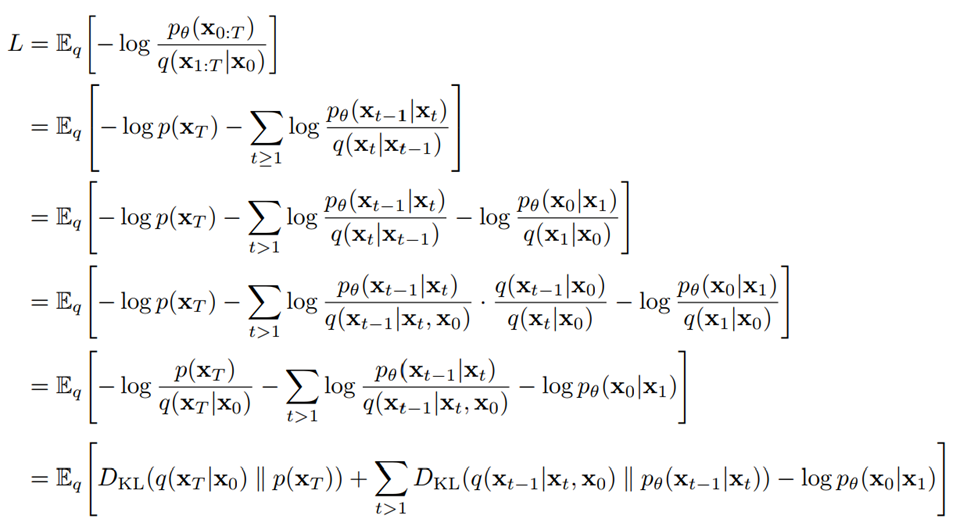
以下是 L 的另一种形式。虽然难以估计,但对讨论很有用。
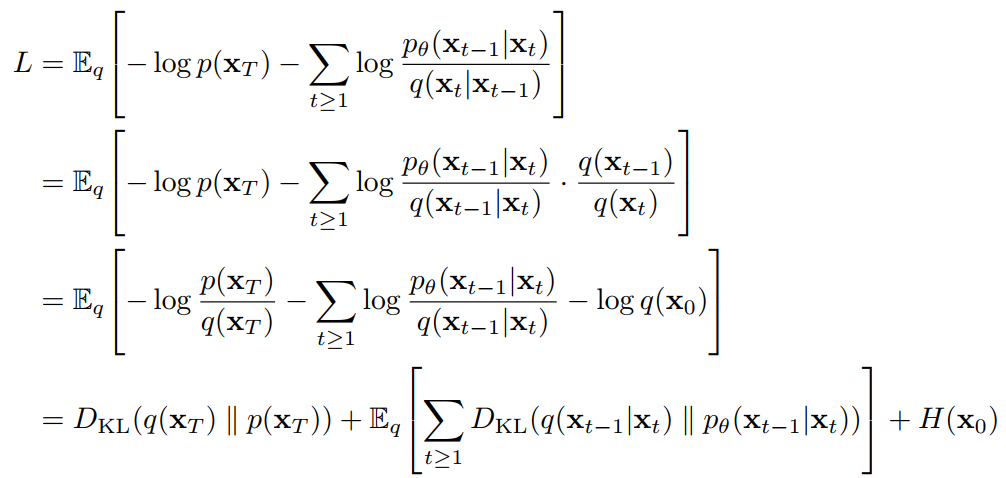
将L重写为:

DDIM
虽然 DDPM 的马尔科夫生成过程可以得到高质量的图像,但因为 DDPM 把采样过程也是一个马尔科夫链,所以需要重新几百上千个步骤才能生成一张图像,耗时很大。DDPM学习目标 只与边缘分布 q(xt|x0) 有关,而不是直接和联合分布 q(x1:T|x0)有关。
有很多形式的联合分布能够满足 q(xt|x0) ,这样的话,采样过程就不一定需要是马尔科夫链。

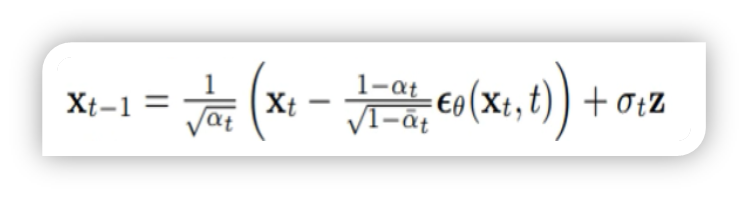
DDPM中采样过程是一个随机过程,所以需要要加z,如下所以:
![]()
DDIM 优化时与 DDPM 一样,对噪声进行拟合,但 DDIM 提出了通过一个更短的 Forward Processes 过程,通过减少采样的步数,来加快采样速度。 ![]() 是独立的值,不是由𝛼𝑡连乘得到的。因为此时的 𝛼𝑡没有定义,只是为了和DDPM的符号对应上。同样𝑝𝜃(𝑥𝑡-1|𝑥𝑡)无法直接得到,用𝑝𝜃(𝑥𝑡-1|𝑥𝑡,𝑥0)。
是独立的值,不是由𝛼𝑡连乘得到的。因为此时的 𝛼𝑡没有定义,只是为了和DDPM的符号对应上。同样𝑝𝜃(𝑥𝑡-1|𝑥𝑡)无法直接得到,用𝑝𝜃(𝑥𝑡-1|𝑥𝑡,𝑥0)。
前向过程
前向过程如下:

qσ(𝑥𝑇|𝑥0)的概率分布为:
![]()
当t>1时,qσ(𝑥𝑡-1|𝑥𝑡,𝑥0)概率分布为:
![]()
正向过程可由贝叶斯法则推导得出:

这里的正向过程不再是马尔可夫过程,因为每个 𝑥𝑡 可能同时依赖于 𝑥𝑡-1 和 𝑥0。σ 的大小控制着正向过程的随机程度;当 σ 趋近于 0 时,我们达到一种极端情况,即只要观察到 𝑥0 和某个 t 时刻的𝑥𝑡,那么𝑥𝑡-1 就变得已知且固定。
逆向过程

当![]() 时,DDIM就 变成了DDPM。对于所有的t,σt = 0时,在给定𝑥𝑡-1和𝑥0时,前向过程是确定性的,除了t = 1。在生成过程中,随机噪声𝜖t之前的系数变为零。
时,DDIM就 变成了DDPM。对于所有的t,σt = 0时,在给定𝑥𝑡-1和𝑥0时,前向过程是确定性的,除了t = 1。在生成过程中,随机噪声𝜖t之前的系数变为零。
Flow Matching
定义1:
凡含有参数,未知函数和未知函数导数 (或微分) 的方程,称为微分方程,有时简称为方程,未知函数是一元函数的微分方程称作常微分方程,未知函数是多元函数的微分方程称作偏微分方程。微分方程中出现的未知函数最高阶导数的阶数,称为微分方程的阶。
训练
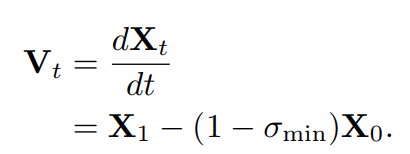
训练的时候,从视频隐空间中得到一个样本X1,从[0, 1]中采样一个time-step t ,采样一个服从 N(0, 1)的噪声,用它们构建一个训练样本Xt。训练模型来预测速度![]() ,从Xt变成X1的速度。Flow Matching的重点工作是构建Xt。常采用的是简单的线性插值或the optimal transport path,以OT为例。
,从Xt变成X1的速度。Flow Matching的重点工作是构建Xt。常采用的是简单的线性插值或the optimal transport path,以OT为例。
![]()
其中,σmin = 10-5,可以得到速度的GT
模型参数用θ表示, text prompt embedding用 P表示,预测的速度用u(Xt, P, t)表示。模型的训练目标是最小化GT和预测速度的均方误差。
![]()
推理
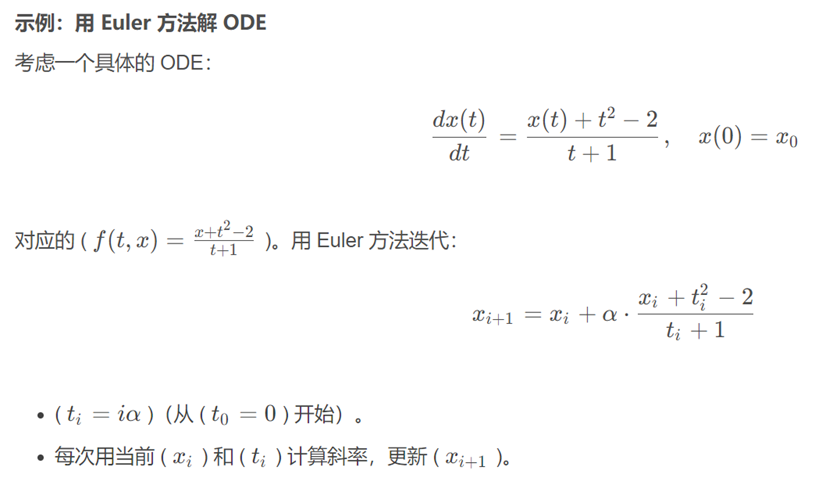
推理阶段,首先从N(0, 1)采样得到X0,然后使用一个常微分方程求解器和模型的估计值![]() 去计算X1。常用的是一阶欧拉ODE求解器,它为模型提供了特定的的N个时间步的离散集。
去计算X1。常用的是一阶欧拉ODE求解器,它为模型提供了特定的的N个时间步的离散集。
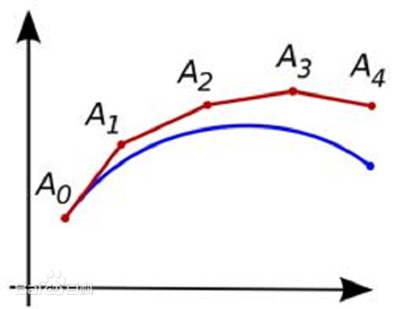
Xt是一条曲线,Vt是曲线的切线斜率。一阶Euler 方法沿着切线走一小步 (α),然后在新的位置重新计算斜率,继续前进。虽然简单,但这种“直线逼近”在步长足够小时能很好地追踪曲线。