强化学习RL
概述
Reinforcement Learning,RL,机器学习的一个子领域,通过与环境的交互来学习如何实现特定的目标。
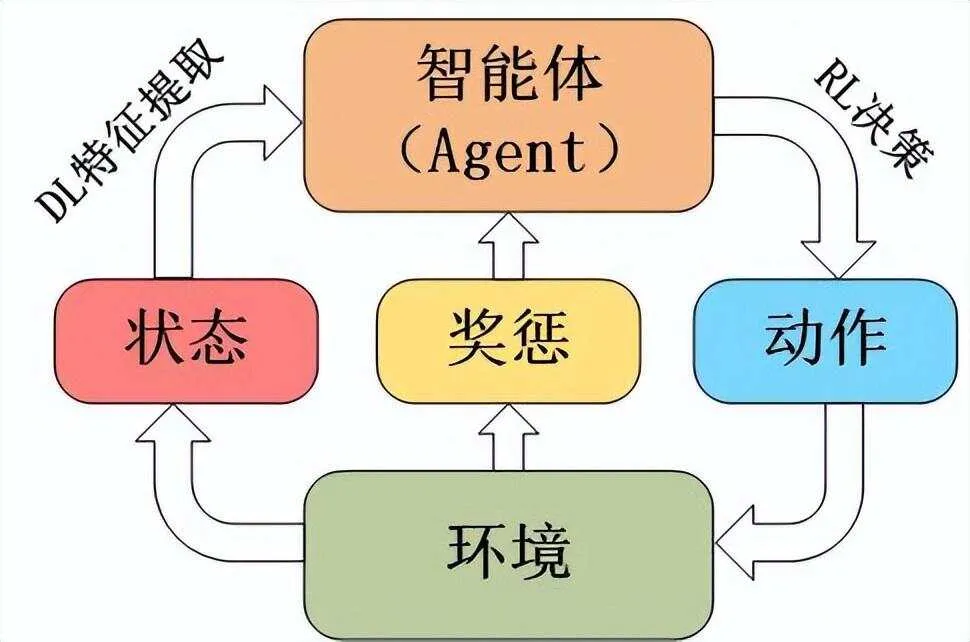
在RL中,智能体(Agent)在环境中通过执行动作(Action)来改变状态(State),并根据状态转移获得奖励(Reward),目标是最大化其长期累积奖励,通常涉及到策略(Policy)的学习,即在给定状态下选择最佳动作的规则。核心机制包括试错和反馈,通过价值函数(Value Function)或Q函数形式化描述最优决策过程。
组件:
- 状态:智能体所处的环境情况;
- 动作:智能体在特定状态下可以执行的行为;
- 奖励:智能体执行动作后从环境中获得的反馈,用于评价动作的好坏;
- 策略:智能体选择动作的规则或策略,可以是确定性的或随机性的;
- 价值函数:预测智能体从某个状态出发,遵循特定策略所能获得的累积奖励。
Q值函数,也称为动作价值,动作价值函数(Action-Value Function),一种特殊的价值函数,估计在给定状态下采取特定动作的预期回报。
三个模型
- 策略模型:指AI在不同环境状态下应该采取的行动,或采取各个行动的概率分布。
- 价值模型:用于评估AI在某个状态下的价值,表示AI从某个状态开始,遵循某种策略所能获得的长期累积奖励的估计值。
- 奖励模型:用于量化AI在环境中执行某个动作时所获得奖励的函数,就是告诉AI什么样的行为可获得更高奖励,什么样的行为会得到惩罚。
通常建模为马尔可夫决策过程(Markov decision process,MDP),包含状态、动作、状态转移概率、奖励和折扣因子五个关键要素,用于描述智能体与环境之间的交互和决策优化。
分类
基于模型和无模型(是否依赖环境模型)、基于价值和基于策略(学习价值函数或直接策略)、在线和离线策略(数据来源)、交叉熵方法(鼓励探索)以及赌博机和梯度赌博机方法(无状态决策和梯度优化)。
优势函数(A)是动作值函数(Q)与状态值函数(V)的差值,即 A = Q − V A=Q-V A=Q−V。
- V:衡量状态的整体价值
- Q:衡量状态-动作组合的价值
- A:则评估特定动作相对于平均策略的增益
值函数估计的三种主要方法:
- MC:蒙特卡洛,通过完整轨迹估计,无偏但高方差,适合奖励密集且随机性小的场景;优点:无需模型假设,直接基于实际回报学习,长期无偏且期望准确。缺点:方差较大,仅依赖回合最终回报导致估计波动大,奖励稀疏或变化频繁时方差进一步增大。
- TD:时间差分,利用部分轨迹信息,低方差但高偏差,适合快速更新和实时场景;优点:方差小,适合在线学习,可实时更新。缺点:偏差较大,依赖估计值更新,易受初始偏差影响。
- GAE:广义优势估计,结合两者优点。通过参数 λ λ λ灵活权衡偏差与方差,利用加权平均的TD误差估计优势函数,减少偏差并控制方差。适用于需要平衡两者的通用场景。缺点:相比纯TD或MC方法,计算量更大,需在每一步计算加权TD误差。
根据是否在线,分类:
- On-policy:在线策略,通过与环境实时交互获取数据并更新模型。使用与学习策略相同的行为策略采样数据。数据分布与策略一致,收敛性更可靠但样本效率低;代表算法:PPO和A2C/A3C
- Off-policy:离线策略,依赖预先收集的静态数据集进行训练,不与环境交互。允许行为策略与目标策略不同,支持利用历史数据(如经验回放)进行学习。可重用数据、样本效率高,但存在分布偏移和收敛困难的问题。代表算法:Q-Learning、DQN、SAC和TD3。
MC
Monte Carlo,蒙特卡洛,为强化学习提供一种概念上简单易懂的方式:完整地经历一个个情节,观察总回报,并据此更新价值估计。核心观点是,如果运行足够多的情节,平均回报将会收敛到它们的期望值。
核心步骤:
- 策略评估:任意初始化价值估计;
- 生成情节:遵循当前策略生成完整的情节;
- 计算回报:对于访问过的每个状态,计算该次访问后的回报(奖励总和);
- 更新价值估计:通过平均回报来更新价值函数;
- 策略改进:根据更新后的价值函数,使策略变为贪婪策略;
- 重复:持续上述步骤,直到收敛。
独特之处在于,它们会等到一个情节结束后才进行任何更新。这使得它们能够观察到实际回报,而不是基于当前的价值近似来进行估计。
主要有两种类型:
- 首次访问:仅根据一个情节中首次访问某个状态时的情况来更新价值估计。
- 每次访问:根据情节中每次访问某个状态的情况来更新价值估计。
例如,如果状态 s s s在一个情节中出现三次,首次访问蒙特卡洛方法只会使用第一次出现后的回报来更新 V ( s ) V(s) V(s),而每次访问蒙特卡洛方法会使用这三次的全部回报。
关键挑战,要确保所有的状态-动作对都被充分访问,以便进行准确的价值估计。有两种常见的方法可以解决这个问题:
- 探索起始:从随机选择的状态-动作对开始情节;
- ε-贪婪策略:以概率 ε ε ε选择随机动作,而不是贪婪动作。
在大多数情况下,后一种方法更具实用性,因为它不需要能够随意设置起始状态和动作。
TD
Temporal Difference,时间差分。MC要等到情节结束才更新价值估计,TD则基于其他估计来更新价值,这个过程被称为引导(bootstrapping),因此是一种结合蒙特卡洛方法和动态规划元素的混合方法。
核心:根据当前的估计立即进行更新。
时间差分更新遵循以下模式: V ( S t ) ← V ( S t ) + α [ R t + 1 + γ V ( S t + 1 ) − V ( S t ) ] V(S_t)\leftarrow V(S_t)+\alpha\left[R_{t+1}+\gamma V(S_{t+1})-V(S_t)\right] V(St)←V(St)+α[Rt+1+γV(St+1)−V(St)]
方括号中的项就是时间差分误差,即当前估计与新的目标估计之间的差值。
对比
| 特性 | MC | TD |
|---|---|---|
| 回合完整性要求 | 需要完整回合 | 可以从不完整回合中学习 |
| 更新时机 | 回合结束时更新 | 每一步后更新 |
| 方差 | 方差较高 | 方差较低 |
| 偏差 | 无偏估计 | 对初始估计有偏差 |
| 初始值敏感性 | 较不敏感 | 较为敏感 |
| 计算效率 | 效率较低 | 效率较高 |
| 处理连续任务的能力 | 具有挑战性 | 天然适用 |
根本区别在于它们估计回报的方式:
- MC使用采样:对完整情节的实际回报求平均
- TD使用引导:基于其他估计来更新估计值
分类:
- 在线:SARSA
- 离线:Q-Learning
SARSA
State-Action-Reward-State-Action,状态-动作-奖励-状态-动作,,反映其更新规则中使用的事件序列。一种在线策略方法,意味着它学习的是实际遵循的策略的价值。
关键:SARSA在学习过程中考虑实际行为。
Q-Learning
通过迭代更新Q值来逼近最优Q函数。算法流程:
- 初始化Q表:创建一个Q表,通常初始化为零或其他小的随机值,以表示对环境的无知。Q表将随着智能体与环境的交互而不断更新;Q表是一个二维数组,行表示状态,列表示动作。每个单元格 Q ( s , a ) Q(s,a) Q(s,a)表示在状态 s s s下采取动作 a a a的预期回报。
- 选择动作:在每个时间步骤中,智能体根据当前状态和Q表选择一个动作。通常涉及到探索和利用的权衡,以确保在学习过程中不断探索新的动作策略。使用ε-greedy策略来平衡探索(exploration)和利用(exploitation):以 1 − ε 1-ε 1−ε的概率选择当前Q值最高的动作,以 ε ε ε的概率随机选择一个动作;允许智能体在大多数时间利用已知的最佳动作,同时保留一定概率去探索新的动作,以发现可能更好的策略。
- 执行动作:智能体执行所选择的动作,并观察环境的响应,包括获得的奖励信号和新的状态;
- 更新Q值:根据观察到的奖励信号 r r r和新状态 s ′ s' s′,智能体更新Q值。涉及到使用Q-Learning的更新规则,如贝尔曼方程;Q-Learning的核心是更新Q值的公式,该公式基于贝尔曼方程: Q ( s , a ) ← Q ( s , a ) + α [ r + γ m a x a ′ Q ( s ′ , a ′ ) − Q ( s , a ) ] Q(s,a)\leftarrow Q(s,a)+\alpha\left[r+\gamma max_{a'}Q(s',a')-Q(s,a)\right] Q(s,a)←Q(s,a)+α[r+γmaxa′Q(s′,a′)−Q(s,a)]其中:
- Q ( s , a ) Q(s,a) Q(s,a)是在状态 s s s下采取动作 a a a的 Q Q Q值;
- α \alpha α是学习率,控制新信息的影响程度,即控制新估计值与旧估计值之间的权衡;
- r r r是在执行动作 a a a后获得的即时奖励;
- γ \gamma γ是折扣因子,表示未来奖励的重要性;
- s ′ s' s′是执行动作 a a a后观察到的新状态;
- a ′ a' a′是在新状态 s ′ s' s′下选择的下一个动作;
- m a x a ′ Q ( s ′ , a ′ ) max_{a'}Q(s',a') maxa′Q(s′,a′)是在新状态 s ′ s' s′下所有可能动作的最大Q值,表示对未来奖励的最大预期。
- 重复迭代:智能体不断地执行上述步骤,与环境互动,学习和改进Q值函数,直到达到停止条件(最大迭代次数或Q值收敛)。
注:贝尔曼方程是动态规划中的核心原理,描述一个状态的价值可通过即时奖励和未来价值的总和来计算。
Q学习在假设完美执行的情况下找到真正的最优路径,而SARSA找到的是考虑了当前探索策略的最优路径。
通过这些步骤,Q-Learning能够学习在给定状态下采取哪些动作能够最大化长期累积奖励,而无需了解环境的具体动态。这种无模型的方法使得Q-Learning在许多实际应用中非常有用,尤其是在模型难以获得或过于复杂时。
在一定条件下,Q-Learning能够收敛到最优策略:
- 有限状态和动作空间:状态空间和动作空间必须是有限集,保证Q表能够被完全更新;
- 探索策略:智能体必须对所有状态-动作对进行无限次的探索,以确保Q值能够被准确估计;
- 学习率衰减: α \alpha α需要随时间衰减,以保证Q值更新的稳定性;
- 折扣因子 γ \gamma γ:必须满足 0 < γ < 1 0<\gamma<1 0<γ<1,以平衡即时奖励和未来奖励的重要性
在实际应用中,Q-Learning的收敛性可通过以下方式进行分析:
- 迭代次数:随着迭代次数的增加,Q值会逐渐稳定,算法趋于收敛;
- 奖励信号:奖励信号的一致性和可靠性对Q值的收敛性有重要影响;
- 探索策略:ε-greedy策略中的 ε ε ε值对收敛速度和稳定性有显著影响。
Q-Learning中的探索与利用平衡是通过ε-greedy策略实现的,允许智能体在探索新动作和利用已知最佳动作之间进行权衡:
- 探索:以 ε ε ε的概率随机选择动作,以发现新的状态-动作对和潜在的更高回报;
- 利用:以的概率选择当前Q表中Q值最高的动作,以利用已有的知识。
ε ε ε值的动态调整对平衡探索与利用至关重要:
- 初始值:初始时, ε ε ε值通常设置较高,以促进探索;
- 衰减:随着学习进行, ε ε ε值逐渐减小,使智能体更多地利用已知的最佳策略;
- 自适应调整:在某些变体中, ε ε ε值可根据学习进度自适应调整,以优化探索与利用的平衡。
应用场景:游戏(棋盘类,如Atari、围棋)、机器人导航和自动驾驶(路径规划、自主决策)、资源管理(优化资源分配,如网络流量控制和电力分配)、推荐系统、NLP(如对话系统和机器翻译)、健康医疗(可用于制定辅助诊断、治疗计划,以及医疗资源的优化配置)、智能教学系统。
AC
Actor-Critic,策略-价值模型
TODO
DSAC-T
论文,Distributional Soft Actor-Critic with Three Refinements,论文作者开源DSAC-v1,
面向相对较小的模型(如1B以下),并用于自动驾驶、机器人、游戏等任务,采用AC架构,通过价值函数模型为策略改进提供依据。
使用状态-动作价值函数 Q ( s , a ) Q(s,a) Q(s,a),代表在状态下采取动作后未来回报的期望值。并且DSAC-T进一步将其扩展为了分布式值函数 Z ( s , a ) Z(s,a) Z(s,a),输出价值估计的均值和方差,通过对值分布的建模,有效缓解过估计问题。在基准测试环境中,DSAC-T算法以50%以上的优势领先于OpenAI的PPO和Deepmind的DDPG等算法。
PRIME
TODO
DPO
论文,Direct Preference Optimization,直接偏好优化,离线优化,直接利用偏好数据训练策略,无需显式奖励模型,训练更简单,但易受分布偏移影响,稳定性较差。直接微调策略模型,依赖偏好数据中的对比样本(选择vs拒绝)。在奖励函数中直接加入KL散度(Kullback-Leibler Divergence)惩罚项,以防止策略更新幅度过大。
L D P O ( π θ ; π r e f ) = − E ( x , y w , y l ) ∼ D [ log σ ( β log π θ ( y w ∣ x ) π θ ( y l ∣ x ) − β log π θ ( y l ∣ x ) π r e f ( y l ∣ x ) ) ] \mathcal{L}_{\mathrm{DPO}}(\pi_\theta; \pi_{\mathrm{ref}}) = -\mathbb{E}_{(x, y_w, y_l) \sim D} \left[ \log \sigma \left( \beta \log \frac{\pi_\theta(y_w \mid x)}{\pi_\theta(y_l \mid x)} - \beta \log \frac{\pi_\theta(y_l \mid x)}{\pi_{\mathrm{ref}}(y_l \mid x)} \right) \right] LDPO(πθ;πref)=−E(x,yw,yl)∼D[logσ(βlogπθ(yl∣x)πθ(yw∣x)−βlogπref(yl∣x)πθ(yl∣x))]
优点:
- 简化流程:直接利用偏好数据,省去奖励模型训练,计算成本更低;
- 适合离线场景:在语言模型对齐等任务中表现优异。
缺点:
- 分布偏移敏感:策略可能偏离偏好数据分布,导致性能下降;
- KL约束弱化:偏好确定性增强时,KL正则化效果减弱,易过拟合。
PPO
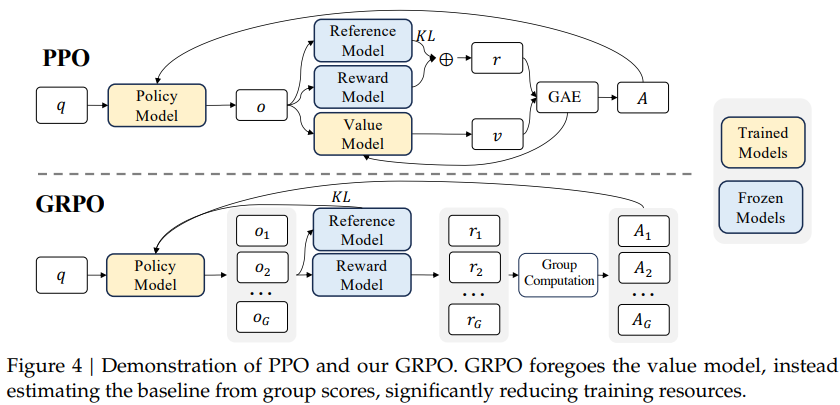
论文,Proximal Policy Optimization,近端策略优化,依赖价值模型来估计优势函数(Advantage),即通过额外训练一个神经网络来预测长期收益的基线值。基于令牌级(Token-Level)的奖励计算,直接评估每个生成标记的收益。通过剪辑目标函数和信任区域约束策略更新,稳定性较高。
J P P O ( θ ) = E q ∼ p ( Q ) , o ∼ π θ o l d ( O ∣ q ) [ 1 ∣ o ∣ ∑ t = 1 ∣ o ∣ min ( π θ ( o t ∣ q , o < t ) π θ o l d ( o t ∣ q , o < t ) A t , c l i p ( π θ ( o t ∣ q , o < t ) π θ o l d ( o t ∣ q , o < t ) , 1 − ϵ , 1 + ϵ ) A t ) ] J_{\mathrm{PPO}}(\theta)=\mathbb{E}_{q\sim p(Q),\,o\sim\pi_{\mathrm{\theta_{old}}}(O\mid q)}\left[\frac{1}{|o|}\sum_{t=1}^{|o|} \min\left( \frac{\pi_\theta(o_t|q, o_{<t})}{\pi_{\mathrm{\theta_{old}}}(o_t|q, o_{<t})}A_t,\, \mathrm{clip} \left( \frac{\pi_\theta(o_t|q, o_{<t})}{\pi_{\mathrm{\theta_{old}}}(o_t|q, o_{<t})},1- \epsilon,1+\epsilon \right) A_t \right) \right] JPPO(θ)=Eq∼p(Q),o∼πθold(O∣q) ∣o∣1t=1∑∣o∣min(πθold(ot∣q,o<t)πθ(ot∣q,o<t)At,clip(πθold(ot∣q,o<t)πθ(ot∣q,o<t),1−ϵ,1+ϵ)At)
优点:
- 稳定性强:通过剪辑目标函数(概率比)限制策略更新幅度,避免训练崩溃;
- 通用性高:适用于连续/离散动作空间,广泛用于机器人等领域。
缺点:
- 计算开销大:需频繁环境交互和奖励模型调用,样本效率较低;需要维护一个与策略模型大小相当的价值网络,导致显著的内存占用和计算代价。
- 策略更新不稳定:策略更新依赖于单个动作奖励值,可能导致较高方差,影响训练稳定性;
- 依赖奖励模型质量:若奖励模型设计不佳,策略可能过优化。
GRPO
DeepSeek提出,GRPO论文,DeepSeek-R1论文,Group Relative Policy Optimization,组相对策略优化。
主流RL通过引入价值模型,可更准确地判断每个动作的优劣,从而改进策略。价值函数估计的准确性直接决定策略好坏。在大多数任务中,能给出较合理的过程奖励设定,此时价值函数可快速收敛。而对于部分只具有结果奖励的任务,例如围棋,则可以通过大量的样本采集和模型更新,获得一个较准确的价值模型。因此在这些任务上使用RL时,引入价值模型可以大幅提升算法性能表现。但对于LLM,不仅过程奖励难以合理定义,其巨大的参数规模使得大量采样更新不可行。因此GRPO放弃使用价值函数模型,直接优化策略。
移除价值模型,改用群体归一化奖励作为基线。不需要使用价值模型,采用群体相对奖励机制,用当前策略对同一问题多次生成回答,并以这些回答的平均奖励估计基线,计算相对奖励和优势。这减少训练资源消耗,并避免价值估计不准的问题。
将KL散度作为正则化项直接引入损失函数中,从而更直接地控制策略更新的稳定性。但可能因组计算引入复杂性而影响稳定性。相比PPO,内存占用减少约40%,训练速度更快。
GRPO的优势函数计算有两个版本,分别对应结果监督和过程监督两种奖励方式,结果监督只在每个回答结束时提供奖励,而过程监督在每个推理步骤结束时提供奖励。DeepSeek-R1-Zero训练采用的是结果监督
J G R P O ( θ ) = E q ∼ P ( Q ) , { o i } i = 1 G ∼ π θ o l d ( O ∣ q ) [ 1 G ∑ i = 1 G 1 ∣ o i ∣ ∑ t = 1 ∣ o i ∣ ( min [ π θ ( o i , t ∣ q , o i , < t ) π θ o l d ( o i , t ∣ q , o i , < t ) A ^ i , t , c l i p ( π θ ( o i , t ∣ q , o i , < t ) π θ o l d ( o i , t ∣ q , o i , < t ) , 1 − ϵ , 1 + ϵ ) A ^ i , t ] − β D K L ( π θ ∥ π r e f ) ) ] \mathcal{J}_{\mathrm{GRPO}}(\theta)=\mathbb{E}_{q\sim P(Q),\,\{o_i\}_{i=1}^G\sim \pi_{\theta_{\mathrm{old}}}(O|q)}\left[\frac{1}{G}\sum_{i=1}^{G}\frac{1}{|o_i|}\sum_{t=1}^{|o_i|}\left(\min\left[\frac{\pi_\theta(o_{i,t}|q,o_{i,<t})}{\pi_{\theta_{\mathrm{old}}}(o_{i,t}|q,o_{i,<t})}\hat{A}_{i,t},\,\mathrm{clip}\left(\frac{\pi_\theta(o_{i,t}|q,o_{i,<t})}{\pi_{\theta_{\mathrm{old}}}(o_{i,t}|q,o_{i,<t})},1-\epsilon,1+\epsilon\right)\hat{A}_{i,t} \right] - \beta \mathcal{D}_{\mathrm{KL}} \left( \pi_\theta \| \pi_{\mathrm{ref}} \right) \right) \right] JGRPO(θ)=Eq∼P(Q),{oi}i=1G∼πθold(O∣q) G1i=1∑G∣oi∣1t=1∑∣oi∣(min[πθold(oi,t∣q,oi,<t)πθ(oi,t∣q,oi,<t)A^i,t,clip(πθold(oi,t∣q,oi,<t)πθ(oi,t∣q,oi,<t),1−ϵ,1+ϵ)A^i,t]−βDKL(πθ∥πref))
解读:
R a t i o = π θ ( o i , t ∣ q , o i , < t ) π θ o l d ( o i , t ∣ q , o i , < t ) Ratio=\frac{\pi_\theta(o_{i,t}|q, o_{i,<t})}{\pi_{\theta_{\mathrm{old}}}(o_{i,t}|q, o_{i,<t})} Ratio=πθold(oi,t∣q,oi,<t)πθ(oi,t∣q,oi,<t)
是当前策略与旧策略的概率比, A ^ i , t \hat{A}_{i,t} A^i,t是分组相对奖励,通过对每个动作的奖励进行归一化得到。
对比PPO
实现流程:
- 环境定义:定义群体中各个智能体,每个智能体都有自己的状态空间、策略空间和奖励函数,环境也会根据智能体的动作给出反馈
- 分配初始策略:为每个智能体分配一个初始策略
- 群体交互与数据收集:让每个智能体和环境交互,并根据自己的策略选择动作,然后更新环境状态
- 相对关系分析:分析智能体之间的相对关系,比如哪些智能体协作更紧密,哪些智能体的动作对环境影响更大
- 策略优化:根据相对关系分析的结果,使用梯度下降算法更新策略网络的参数,使得群体目标实现概率最大化
- 重复迭代:重复步骤3~5,直到满足一定的终止条件。
算法流程:
- 采样动作组:对于每个输入状态 s s s,从当前策略 ∏ θ \prod_θ ∏θ中采样一组动作 { a 1 , a 2 , . . . , a G } \{a_1,a_2,...,a_G\} {a1,a2,...,aG},采样基于策略模型的概率分布,确保多样性。
- 奖励评估:每个采样动作 a i a_i ai都会通过奖励函数 R a i R_{ai} Rai进行评估,得到对应的奖励值 r i r_i ri。奖励函数可根据具体任务设计,在数学推理任务中,奖励函数可基于答案的正确性。
- 计算相对优势:将每个动作的奖励值进行归一化处理,得到相对优势 A ^ i \hat{A}_i A^i,可通过公式计算: A ^ i = r i − m e a n ( r ) s t d ( r ) \hat{A}_i=\frac{r_i-mean(\mathbf{r})}{std(\mathbf{r})} A^i=std(r)ri−mean(r)
- 策略更新:根据计算得到的相对优势 A ^ i \hat{A}_i A^i,更新策略模型的参数 θ θ θ。目标是增加具有正相对优势的动作的概率,同时减少具有负相对优势的动作的概率。
- KL散度约束:为了防止策略更新过于剧烈,GRPO在更新过程中引入KL散度约束。通过限制新旧策略之间的KL散度,确保策略分布的变化在可控范围内。
优点:
- 多源信息整合:通过组计算模块处理多观测值,提升决策质量;
- 继承PPO优势:保留剪辑目标函数和稳定更新机制;
- 计算效率:通过避免价值网络的使用,显著降低计算和存储需求,提高训练效率;
- 稳定性:通过组内相对奖励的计算,减少策略更新的方差,确保更稳定的学习过程;
- 可控性:引入KL散度约束,能够更精细地控制策略更新的幅度,保持策略分布稳定性。
缺点:
- 复杂度高:组计算模块增加模型参量和训练难度;
- 采样成本:需要对每个状态采样一组动作,可能增加采样成本;
- 应用场景有限:目前主要见于特定扩展任务,通用性验证不足,尤其是在奖励信号稀疏的情况下。
对比RLHF
| 维度 | GRPO | OpenAI RLHF |
|---|---|---|
| 算法原理 | 通过组内相对奖励机制估计优势函数,无需价值网络,直接在损失函数中加入KL散度正则项 | 基于人类反馈,通过奖励建模和强化学习优化模型输出,使其符合人类偏好 |
| 训练效率 | 简化训练流程,降低计算开销和内存需求,训练效率高,收敛速度快 | 训练过程复杂,包括监督学习、奖励模型训练和强化学习优化,计算成本高 |
| 策略更新稳定性 | 策略更新稳定,通过组内相对奖励减少方差,直接的KL散度正则化确保更新可控 | 策略更新稳定性依赖于奖励模型的准确性和标注数据质量,可能存在偏差 |
| 应用场景 | 特别适用于需要推理能力的任务,如数学推理、代码生成等 | 通用性强,适用于各种需要优化模型输出以符合人类偏好的任务,如聊天机器人等 |
| 资源需求 | 资源需求低,高效且具有成本效益,适合大规模语言模型 | 资源需求高,计算成本高昂,需要大量人类标注数据和计算资源 |
| 模型性能 | 在特定任务上性能优异,如数学推理任务解题准确率显著提升 | 在通用应用中性能出色,生成的输出更符合人类偏好,减少有害内容生成 |
| 优缺点 | 优点:无需价值网络,降低计算开销;策略更新稳定,适合复杂任务;针对特定任务优化,生成质量高。 缺点:采样成本高,推理时间增加;奖励模型设计复杂;策略更新可能过于保守 | 优点:优化人类偏好,提升用户体验;通用性强,适用范围广;确保高质量输出。 缺点:训练成本高,标注数据需求大;标注偏差影响性能;训练稳定性问题 |
对比
均属于策略优化方法相同:通过调整策略参数(如神经网络权重)来最大化累积奖励或偏好数据匹配度。
都是通过熵正则化或其他机制(如KL散度约束)鼓励策略探索,避免过早收敛到次优解。
DPO和PPO梯度更新方式相同:均采用梯度下降法优化目标函数,例如PPO的替代目标函数、DPO的偏好对数损失函数。
PPO和GRPO架构相同:均包含策略模型与价值模型,涉及奖励或偏好建模。
总结:
- DPO:在离线偏好对齐任务中更高效,但需解决分布偏移和稳定性问题;
- PPO:通用性强、稳定性高的在线RL基准方法,但依赖奖励模型和大量交互数据;
- GRPO:作为PPO扩展,在复杂多观测任务中潜力大,但需进一步验证其普适性。
OREO
论文,Offline Reasoning Optimization,离线推理优化,通过优化软贝尔曼方程,联合训练策略模型和价值函数,克服现有方法在处理稀疏奖励和信用分配方面的局限性。
O1-Pruner
论文,GitHub
一种基于RL的微调技术,其核心在于通过预采样评估模型的基线性能,并利用RL风格的微调机制,鼓励模型在准确性约束下生成更短的推理过程。创新性步骤:
- 推理路径优化:针对长思维模型中存在的推理冗余现象,通过优化推理路径,减少不必要的计算步骤;
- 动态调整推理长度:模型能够根据问题的复杂性动态调整推理的长度,使得在简单问题上输出较短的答案,而在复杂问题上则生成更为详细的推理过程;
- 实验验证:通过在多种数学推理基准上进行实验,显著降低推理开销,提高模型准确性,展示其在处理复杂任务时的有效性。
参考
- Q-Learning