2025年TRE SCI1区TOP,随机环境下无人机应急医疗接送与配送的先进混合方法,深度解析+性能实测
目录
- 1.摘要
- 2.问题描述
- 3.ALNS-QLTP算法
- 4.结果展示
- 5.参考文献
- 6.代码获取
- 7.算法辅导·应用定制·读者交流
1.摘要
论文提出了一种优化紧急医疗运输的混合方法,结合无人机(UAV)进行接送与配送。模型考虑了随机需求和飞行环境的不确定性,解决了库存短缺、突发需求和地理障碍等问题。首先,构建了一个基于混合整数线性规划的医疗接送模型(HPDUP),然后扩展为考虑随机环境的HPDU-SEP模型。为优化无人机轨迹,提出了结合Q-learning的自适应大邻域搜索(ALNS-QLTP)方法,通过地理信息和反馈参数提升优化效率。实验表明,ALNS-QLTP在大规模不确定环境中能显著提高轨迹优化效果,保证了较高的患者覆盖率。
2.问题描述
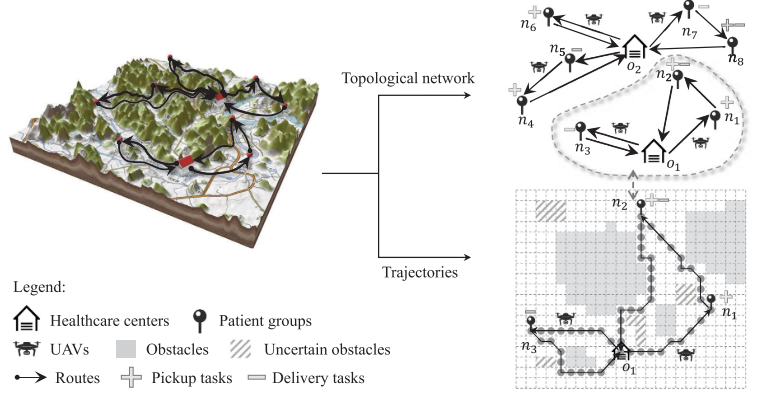
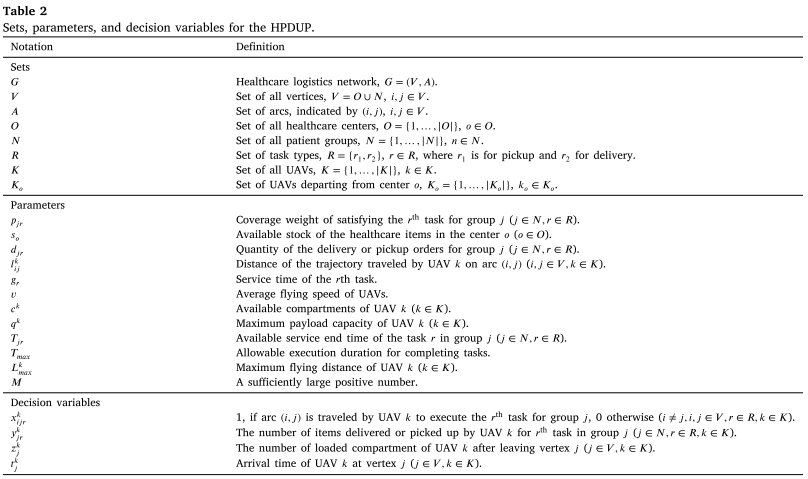
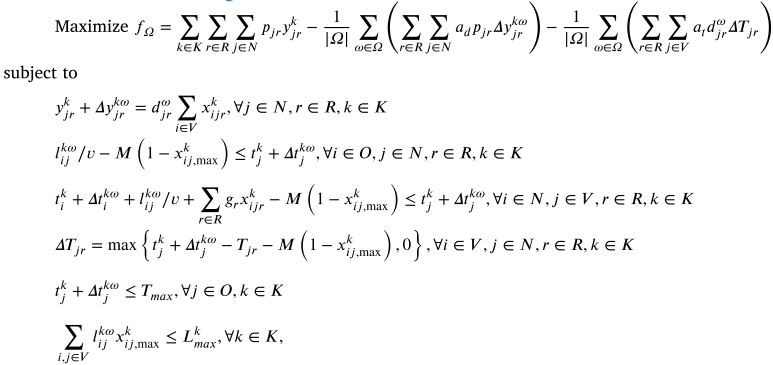
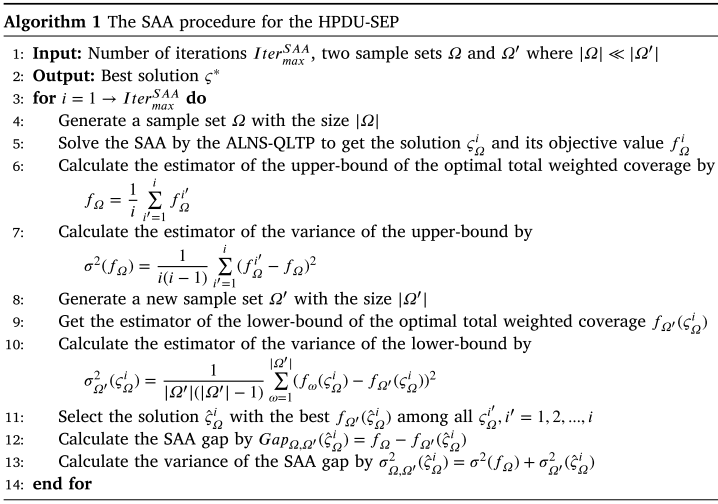
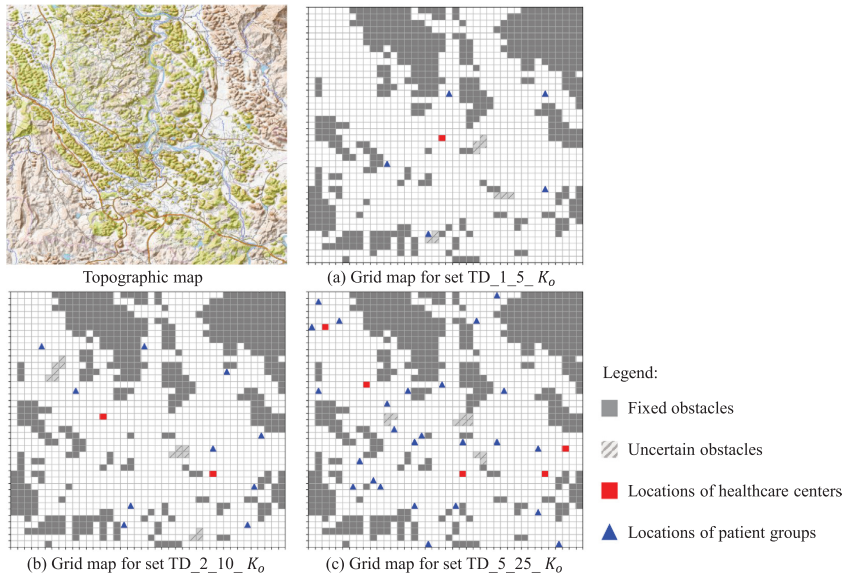
论文提出了一种基于无人机的紧急医疗物流优化方法(HPDU-SEP),通过混合整数线性规划(MILP)和样本平均近似(SAA)模型,处理随机需求和飞行距离的不确定性。在该模型中,医疗任务被分配到不同的无人机,考虑了飞行路径、时间窗、载重能力等约束,并应对地理障碍和不确定因素的影响。目标是最大化医疗任务的加权覆盖率,并降低由于不确定性带来的惩罚。
在紧急情况下,由于无法准确及时地检测所有临时障碍物和预测需求,HPDU-SEP成为一个随机规划问题,传统方法难以求解。为此,本文采用样本平均近似(SAA)方法,通过多个随机样本估计期望目标函数,进而获取候选解并计算其最优性间隙。对于不确定的飞行距离,考虑到多种不确定障碍物的影响,每种情境下的障碍物概率不同,飞行时间可能延迟。延迟部分超过服务结束时间的部分将产生回溯惩罚,从覆盖目标中扣除。对于需求的不确定性,假设每个任务的需求波动遵循正态分布,且每个情境下的需求变化可引入回溯惩罚。
3.ALNS-QLTP算法
ALNS-QLTP算法结合Q-learning优化无人机飞行轨迹,通过离线学习和实时反馈不断提升轨迹生成效率。算法通过不确定需求和障碍的概率分布生成样本情境,随机生成初始解,并通过移除和插入操作进行迭代优化,最终输出最优解。
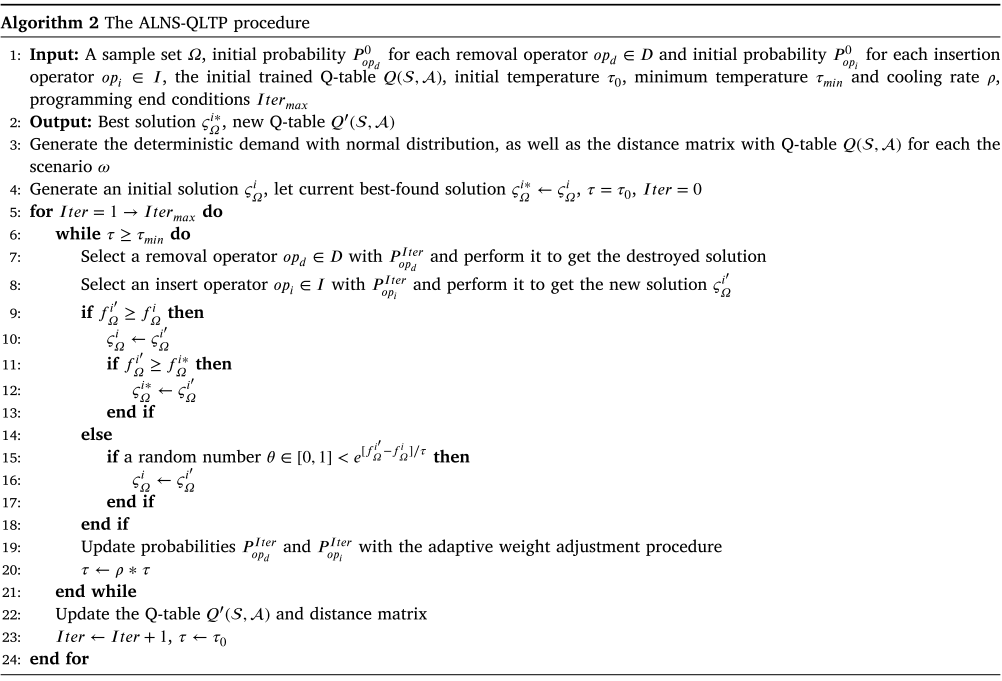
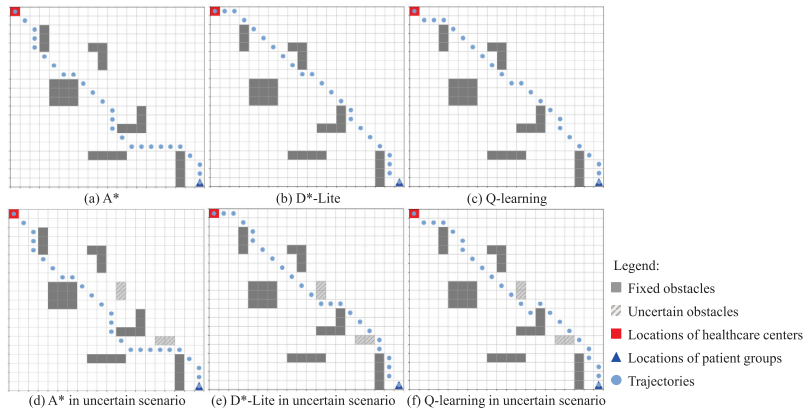
飞行路径受随机障碍物的影响,障碍物的出现概率通过随机数生成确定,进而影响最短距离计算。Q-learning通过动态决策和实时反馈优化轨迹,生成的Q表格用于指导最优路径规划,确保应对不确定障碍环境,提升物流服务的效率和稳定性。
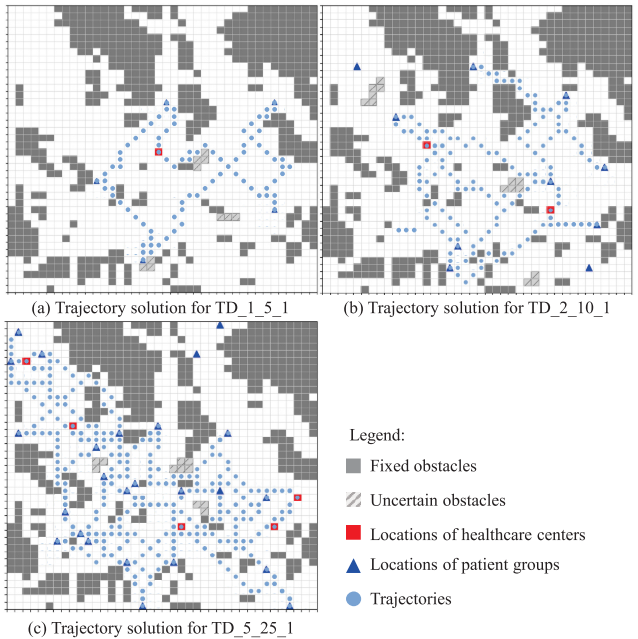
4.结果展示
5.参考文献
[1] Lin Z, Demir E, Xu X, et al. An advanced hybrid approach for emergency healthcare pickup and delivery with unmanned aerial vehicles under a stochastic environment[J]. Transportation Research Part E: Logistics and Transportation Review, 2025, 204: 104395.
6.代码获取
xx
7.算法辅导·应用定制·读者交流
xx