【stm32协议外设篇】- PAJ7620手势识别传感器
一、适用场景
适用场景:非接触式人机交互(菜单翻页、音量/频道切换、灯光控制、机器人/车体手势遥控)、手势唤醒、嵌入式交互原型与课程实验。
二、器材清单
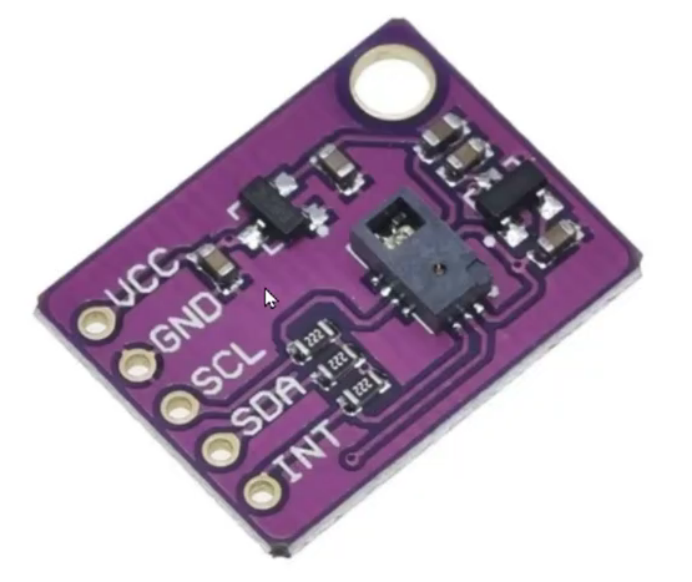
PAJ7620 手势识别模块(常见为 GY-PAJ7620模组) ×1
stm32f1 开发板 ×1
若干杜邦线(母对母)×1组
三、工作原理(要点)
PAJ7620有两种功能,一是检测手势,另一个则是检测物体的大小和距离
检测手势:内置红外光学阵列 + 算法,直接输出 9 种手势识别结果:Up, Down, Left, Right, Forward (靠近), Backward (远离), Clockwise, Counter-clockwise, Wave。可通过 I²C 寄存器直接读取识别结果。
检测范围:Normal / Near / Far 模式下典型检测距离约 5–15 cm(Near)或 15–30 cm(Far),视模块/封装与环境而定;视角对角约 60°(Near)等。
四、接线示意(常见模块 4 脚)
VCC → +5V
GND → GND
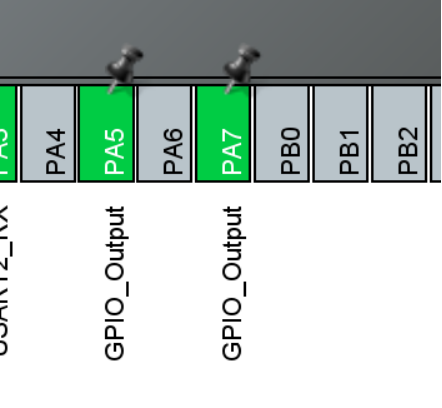
标准库
PA5 →SCL
PA7 →SDA
HAL库
PA5 →SCL
PA7 →SDA
五、示例代码
标准库
#include "stm32f10x.h"
#include "stdio.h"
#include "bsp_SysTick.h"
#include "bsp_usart.h"
#include "oled.h"int main(void)
{ SysTick_Init(); //延时函数初始化 gpio_init(); //初始化与LED连接的硬件接口USART_Config1();Usart_SendString(USART1,"wait\n");delay_us(500000);Usart_SendString(USART1,"waitok\n");while(!paj7620u2_init())//PAJ7620U2传感器初始化{Usart_SendString(USART1,"paj7620u2 error\n");delay_us(5000000);}delay_us(500000);Usart_SendString(USART1,"paj7620u2 ok\n");while(1){paj7620u2_sensor_test();//PAJ7620U2传感器测试}
}
#include "oled.h"
#include "stdio.h"
#include "stdlib.h"
#include "oledfont.h"
#include "bsp_SysTick.h"char show[20];
extern u8 mode;
void gpio_init()
{GPIO_InitTypeDef PA;//使能时钟RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);PA.GPIO_Pin = GPIO_Pin_5 |GPIO_Pin_7;PA.GPIO_Mode = GPIO_Mode_Out_PP;PA.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOA,&PA);scl_h;sda_h;
}void DS1302_IO_GPIO(u8 FLAG)
{GPIO_InitTypeDef GPIO_InitStructre;//RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB,ENABLE); /*open GPIO clock*//**********配置数据IO端口 输出 **********/if(FLAG==0x01){GPIO_InitStructre.GPIO_Pin= GPIO_Pin_7;//配置IO_GPIOGPIO_InitStructre.GPIO_Speed=GPIO_Speed_50MHz;GPIO_InitStructre.GPIO_Mode=GPIO_Mode_Out_PP;GPIO_Init(GPIOA, &GPIO_InitStructre);}/**********配置数据IO端口 输入**********/else if(FLAG==0x00){GPIO_InitStructre.GPIO_Pin= GPIO_Pin_7;//配置IO_GPIOGPIO_InitStructre.GPIO_Speed=GPIO_Speed_50MHz;GPIO_InitStructre.GPIO_Mode=GPIO_Mode_IPU; //配置上拉输入GPIO_Init(GPIOA, &GPIO_InitStructre);}
}//产生IIC起始信号
void IIC_Start(void)
{DS1302_IO_GPIO(out); //sda线输出sda_h;scl_h;delay_us(4);sda_l;//START:when CLK is high,DATA change form high to low delay_us(4);scl_l; //钳住I2C总线,准备发送或接收数据
}//产生IIC停止信号
void IIC_Stop(void)
{DS1302_IO_GPIO(out); //sda线输出scl_l;sda_l; //STOP:when CLK is high DATA change form low to highdelay_us(4);scl_h; sda_h; //发送I2C总线结束信号delay_us(4);
}//等待应答信号到来
//返回值:1,接收应答失败
// 0,接收应答成功
u8 IIC_Wait_Ack(void)
{u8 ucErrTime=0,ack;DS1302_IO_GPIO(in); //SDA设置为输入 sda_h;delay_us(3); scl_h;delay_us(3);if(GPIO_ReadInputDataBit(GPIOA,GPIO_Pin_7) == RESET){ack=0;}elseack=1;scl_l//时钟输出0 return ack;
} //产生ACK应答
void IIC_Ack(void)
{scl_l;DS1302_IO_GPIO(out);sda_l;delay_us(3);scl_h;delay_us(3);scl_l;
}//不产生ACK应答
void IIC_NAck(void)
{scl_l;DS1302_IO_GPIO(out);sda_h;delay_us(2);scl_h;delay_us(2);scl_l;
}//IIC发送一个字节
//返回从机有无应答
//1,有应答
//0,无应答
void IIC_Send_Byte(u8 txd)
{ u8 t; DS1302_IO_GPIO(out); scl_l;//拉低时钟开始数据传输for(t=0;t<8;t++){ if(txd&0x80){sda_h;}elsesda_l;txd<<=1; delay_us(5); //对TEA5767这三个延时都是必须的scl_h;delay_us(5); scl_l; delay_us(5);}
}//读1个字节,ack=1时,发送ACK,ack=0,发送nACK
u8 IIC_Read_Byte(unsigned char ack)
{unsigned char i,receive=0;DS1302_IO_GPIO(in);//SDA设置为输入for(i=0;i<8;i++ ){scl_l; delay_us(4);scl_h;receive<<=1;if(GPIO_ReadInputDataBit(GPIOA,GPIO_Pin_7))receive++; delay_us(4); } if (!ack)IIC_NAck();//发送nACKelseIIC_Ack(); //发送ACK return receive;
}//PAJ7620U2写一个字节数据
u8 GS_Write_Byte(u8 REG_Address,u8 REG_data)
{IIC_Start();IIC_Send_Byte(PAJ7620_ID);if(IIC_Wait_Ack()){IIC_Stop();//释放总线return 1;//没应答则退出}IIC_Send_Byte(REG_Address);IIC_Wait_Ack(); IIC_Send_Byte(REG_data);IIC_Wait_Ack(); IIC_Stop();return 0;
}//PAJ7620U2读一个字节数据
u8 GS_Read_Byte(u8 REG_Address)
{u8 REG_data;IIC_Start();IIC_Send_Byte(PAJ7620_ID);//发写命令if(IIC_Wait_Ack()){IIC_Stop();//释放总线return 0;//没应答则退出} IIC_Send_Byte(REG_Address);IIC_Wait_Ack();IIC_Start(); IIC_Send_Byte(PAJ7620_ID|0x01);//发读命令IIC_Wait_Ack();REG_data = IIC_Read_Byte(0);IIC_Stop();return REG_data;
}
//PAJ7620U2读n个字节数据
u8 GS_Read_nByte(u8 REG_Address,u16 len,u8 *buf)
{IIC_Start();IIC_Send_Byte(PAJ7620_ID);//发写命令if(IIC_Wait_Ack()) {IIC_Stop();//释放总线return 1;//没应答则退出}IIC_Send_Byte(REG_Address);IIC_Wait_Ack();IIC_Start();IIC_Send_Byte(PAJ7620_ID|0x01);//发读命令IIC_Wait_Ack();while(len){if(len==1){*buf = IIC_Read_Byte(0);}else{*buf = IIC_Read_Byte(1);}buf++;len--;}IIC_Stop();//释放总线return 0;}
//PAJ7620唤醒
void GS_WakeUp(void)
{IIC_Start();IIC_Send_Byte(PAJ7620_ID);//发写命令IIC_Stop();//释放总线
}//选择PAJ7620U2 BANK区域
void paj7620u2_selectBank(bank_e bank)
{switch(bank){case BANK0: GS_Write_Byte(PAJ_REGITER_BANK_SEL,PAJ_BANK0);break;//BANK0寄存器区域case BANK1: GS_Write_Byte(PAJ_REGITER_BANK_SEL,PAJ_BANK1);break;//BANK1寄存器区域}}//PAJ7620U2唤醒
u8 paj7620u2_wakeup(void)
{ u8 data=0x0a;GS_WakeUp();//唤醒PAJ7620U2delay_us(5000);//唤醒时间>400usGS_WakeUp();//再次唤醒,以确认PAJ7620U2正常工作delay_us(5000);//唤醒时间>400uspaj7620u2_selectBank(BANK0);//进入BANK0寄存器区域data = GS_Read_Byte(0x00);//读取状态if(data!=0x20) return 0; //唤醒失败return 1;
}//PAJ7620U2初始化
//返回值:0:失败 1:成功
u8 paj7620u2_init(void)
{u8 i;u8 status;gpio_init();//IIC初始化status = paj7620u2_wakeup();//唤醒PAJ7620U2if(!status) return 0;paj7620u2_selectBank(BANK0);//进入BANK0寄存器区域for(i=0;i<INIT_SIZE;i++){GS_Write_Byte(init_Array[i][0],init_Array[i][1]);//初始化PAJ7620U2}paj7620u2_selectBank(BANK0);//切换回BANK0寄存器区域return 1;
}//手势识别测试
void Gesture_test(void)
{u8 i;u8 status;u8 data[2]={0x00};u16 gesture_data;paj7620u2_selectBank(BANK0);//进入BANK0寄存器区域for(i=0;i<GESTURE_SIZE;i++){GS_Write_Byte(gesture_arry[i][0],gesture_arry[i][1]);//手势识别模式初始化}paj7620u2_selectBank(BANK0);//切换回BANK0寄存器区域i=0;while(1){if(mode=='c'){GS_Write_Byte(PAJ_SET_INT_FLAG1,0X00);//关闭手势识别中断输出GS_Write_Byte(PAJ_SET_INT_FLAG2,0X00);break;} status = GS_Read_nByte(PAJ_GET_INT_FLAG1,2,&data[0]);//读取手势状态 if(!status){ gesture_data =(u16)data[1]<<8 | data[0];if(gesture_data) {switch(gesture_data){case GES_UP: Usart_SendString(USART1,"UP\r\n");break; //向上case GES_DOWM: Usart_SendString(USART1,"Down\r\n");break; //向下case GES_LEFT: Usart_SendString(USART1,"Left\r\n");break; //向左case GES_RIGHT: Usart_SendString(USART1,"Right\r\n");break; //向右case GES_FORWARD: Usart_SendString(USART1,"Forward\r\n");break; //向前case GES_BACKWARD: Usart_SendString(USART1,"Backward\r\n");break; //向后case GES_CLOCKWISE: Usart_SendString(USART1,"Clockwise\r\n");break; //顺时针case GES_COUNT_CLOCKWISE: Usart_SendString(USART1,"AntiClockwise\r\n");break; //逆时针case GES_WAVE: Usart_SendString(USART1,"Wave\r\n");break; //挥动default: break;} }}delay_us(500000);}
}//接近检测测试
void Ps_test(void)
{u8 i;u8 data[2]={0x00};u8 obj_brightness=0;u16 obj_size=0;paj7620u2_selectBank(BANK0);//进入BANK0寄存器区域for(i=0;i<PROXIM_SIZE;i++){GS_Write_Byte(proximity_arry[i][0],proximity_arry[i][1]);//接近检测模式初始化}paj7620u2_selectBank(BANK0);//返回BANK0寄存器区域i=0;while(1){ if(mode=='c') break;obj_brightness = GS_Read_Byte(PAJ_GET_OBJECT_BRIGHTNESS);//读取物体亮度data[0] = GS_Read_Byte(PAJ_GET_OBJECT_SIZE_1);//读取物体大小data[1] = GS_Read_Byte(PAJ_GET_OBJECT_SIZE_2);obj_size = ((u16)data[1] & 0x0f)<<8 | data[0];sprintf(show,"light:%d,size:%d\r\n",obj_brightness,obj_size);Usart_SendString(USART1,show);delay_us(500000);}}
//PAJ7620U2传感器测试
void paj7620u2_sensor_test(void)
{ while(1){switch(mode){case 'h': Gesture_test(); break;//手势检测模式case 'n': Ps_test(); break;//接近检测模式 }delay_us(50000); }
}HAL库
int main(void)
{/* USER CODE BEGIN 1 *//* USER CODE END 1 *//* MCU Configuration--------------------------------------------------------*//* Reset of all peripherals, Initializes the Flash interface and the Systick. */HAL_Init();/* USER CODE BEGIN Init *//* USER CODE END Init *//* Configure the system clock */SystemClock_Config();/* USER CODE BEGIN SysInit *//* USER CODE END SysInit *//* Initialize all configured peripherals */MX_GPIO_Init();MX_USART1_UART_Init();MX_TIM2_Init();MX_USART2_UART_Init();/* USER CODE BEGIN 2 */HAL_UART_Receive_IT(&huart2, &RxOneByte, 1);HAL_UART_Transmit(&huart2,"wait\r\n",strlen("wait\r\n"),HAL_MAX_DELAY);HAL_Delay(500);HAL_UART_Transmit(&huart2,"waitok\r\n",strlen("waitok\r\n"),HAL_MAX_DELAY);while(!paj7620u2_init())//PAJ7620U2传感器初始化{HAL_UART_Transmit(&huart2,"paj7620u2 error\r\n",strlen("paj7620u2 error\r\n"),HAL_MAX_DELAY);HAL_Delay(5000);}HAL_Delay(500);HAL_UART_Transmit(&huart2,"paj7620u2ok\r\n",strlen("paj7620u2ok\r\n"),HAL_MAX_DELAY);uint8_t id = GS_Read_Byte(0x00);char buf[32];sprintf(buf, "PAJ ID = 0x%02X\r\n", id);HAL_UART_Transmit(&huart2, buf, strlen(buf), HAL_MAX_DELAY);/* USER CODE END 2 *//* Infinite loop *//* USER CODE BEGIN WHILE */while (1){paj7620u2_sensor_test();/* USER CODE END WHILE *//* USER CODE BEGIN 3 */}/* USER CODE END 3 */
}
#include "stdio.h"
#include "stdlib.h"
#include "paj7620.h"
#include <string.h>
#include "paj7620font.h"
char show[20];
uint8_t RxOneByte;
u8 mode='h';
extern TIM_HandleTypeDef htim2;
extern UART_HandleTypeDef huart2;
/*** @brief 基于 TIM2 的微秒级阻塞延时* @param us: 延时微秒数*/
void Tims_delay_us(uint32_t us)
{const uint32_t max_chunk = 0xFFFF; // 16 位定时器最大// 分段延时,每段不超过 65535uswhile (us >= max_chunk){__HAL_TIM_SET_COUNTER(&htim2, 0); // 计数器清零HAL_TIM_Base_Start(&htim2); // 启动定时器while (__HAL_TIM_GET_COUNTER(&htim2) < max_chunk){/* 等待计数到达 max_chunk */}HAL_TIM_Base_Stop(&htim2); // 停止定时器us -= max_chunk;}// 处理剩余小于 65535 的部分if (us > 0){__HAL_TIM_SET_COUNTER(&htim2, 0);HAL_TIM_Base_Start(&htim2);while (__HAL_TIM_GET_COUNTER(&htim2) < us){/* 等待剩余时间 */}HAL_TIM_Base_Stop(&htim2);}
}void DS1302_IO_GPIO(u8 FLAG)
{__HAL_RCC_GPIOA_CLK_ENABLE();GPIO_InitTypeDef GPIO_InitStruct = {0};if(FLAG==0x01){/* ?? */GPIO_InitStruct.Pin = GPIO_PIN_7; // 9???GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP; // Push Pull ??????GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_HIGH; // ??GPIO_InitStruct.Pull = GPIO_NOPULL;}else {GPIO_InitStruct.Pin = GPIO_PIN_7; // 9???GPIO_InitStruct.Mode = GPIO_MODE_INPUT; // ???? GPIO_InitStruct.Pull = GPIO_PULLUP; }HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);
}//产生IIC起始信号
void IIC_Start(void)
{DS1302_IO_GPIO(out); //sda线输出sda_h;scl_h;Tims_delay_us(4);sda_l;//START:when CLK is high,DATA change form high to low Tims_delay_us(4);scl_l; //钳住I2C总线,准备发送或接收数据
}//产生IIC停止信号
void IIC_Stop(void)
{DS1302_IO_GPIO(out); //sda线输出scl_l;sda_l; //STOP:when CLK is high DATA change form low to highTims_delay_us(4);scl_h; sda_h; //发送I2C总线结束信号Tims_delay_us(4);
}//等待应答信号到来
//返回值:1,接收应答失败
// 0,接收应答成功
u8 IIC_Wait_Ack(void)
{u8 ucErrTime=0,ack;DS1302_IO_GPIO(in); //SDA设置为输入 sda_h;Tims_delay_us(3); scl_h;Tims_delay_us(3);if(HAL_GPIO_ReadPin(GPIOA, GPIO_PIN_7) == RESET){ack=0;}elseack=1;scl_l//时钟输出0 return ack;
} //产生ACK应答
void IIC_Ack(void)
{scl_l;DS1302_IO_GPIO(out);sda_l;Tims_delay_us(3);scl_h;Tims_delay_us(3);scl_l;
}//不产生ACK应答
void IIC_NAck(void)
{scl_l;DS1302_IO_GPIO(out);sda_h;Tims_delay_us(2);scl_h;Tims_delay_us(2);scl_l;
}//IIC发送一个字节
//返回从机有无应答
//1,有应答
//0,无应答
void IIC_Send_Byte(u8 txd)
{ u8 t; DS1302_IO_GPIO(out); scl_l;//拉低时钟开始数据传输for(t=0;t<8;t++){ if(txd&0x80){sda_h;}elsesda_l;txd<<=1; Tims_delay_us(5); //对TEA5767这三个延时都是必须的scl_h;Tims_delay_us(5); scl_l; Tims_delay_us(5);}
}//读1个字节,ack=1时,发送ACK,ack=0,发送nACK
u8 IIC_Read_Byte(unsigned char ack)
{unsigned char i,receive=0;DS1302_IO_GPIO(in);//SDA设置为输入for(i=0;i<8;i++){scl_l; Tims_delay_us(4);scl_h;receive<<=1;if(HAL_GPIO_ReadPin(GPIOA, GPIO_PIN_7))receive++; Tims_delay_us(4); } if (!ack)IIC_NAck();//发送nACKelseIIC_Ack(); //发送ACK return receive;
}//PAJ7620U2写一个字节数据
u8 GS_Write_Byte(u8 REG_Address,u8 REG_data)
{IIC_Start();IIC_Send_Byte(PAJ7620_ID);if(IIC_Wait_Ack()){IIC_Stop();//释放总线return 1;//没应答则退出}IIC_Send_Byte(REG_Address);IIC_Wait_Ack(); IIC_Send_Byte(REG_data);IIC_Wait_Ack(); IIC_Stop();return 0;
}//PAJ7620U2读一个字节数据
u8 GS_Read_Byte(u8 REG_Address)
{u8 REG_data;IIC_Start();IIC_Send_Byte(PAJ7620_ID);//发写命令if(IIC_Wait_Ack()){IIC_Stop();//释放总线return 0;//没应答则退出} IIC_Send_Byte(REG_Address);IIC_Wait_Ack();IIC_Start(); IIC_Send_Byte(PAJ7620_ID|0x01);//发读命令IIC_Wait_Ack();REG_data = IIC_Read_Byte(0);IIC_Stop();return REG_data;
}
//PAJ7620U2读n个字节数据
u8 GS_Read_nByte(u8 REG_Address,u16 len,u8 *buf)
{IIC_Start();IIC_Send_Byte(PAJ7620_ID);//发写命令if(IIC_Wait_Ack()) {IIC_Stop();//释放总线return 1;//没应答则退出}IIC_Send_Byte(REG_Address);IIC_Wait_Ack();IIC_Start();IIC_Send_Byte(PAJ7620_ID|0x01);//发读命令IIC_Wait_Ack();while(len){if(len==1){*buf = IIC_Read_Byte(0);}else{*buf = IIC_Read_Byte(1);}buf++;len--;}IIC_Stop();//释放总线return 0;}
//PAJ7620唤醒
void GS_WakeUp(void)
{IIC_Start();IIC_Send_Byte(PAJ7620_ID);//发写命令IIC_Stop();//释放总线
}//选择PAJ7620U2 BANK区域
void paj7620u2_selectBank(bank_e bank)
{switch(bank){case BANK0: GS_Write_Byte(PAJ_REGITER_BANK_SEL,PAJ_BANK0);break;//BANK0寄存器区域case BANK1: GS_Write_Byte(PAJ_REGITER_BANK_SEL,PAJ_BANK1);break;//BANK1寄存器区域}}//PAJ7620U2唤醒
u8 paj7620u2_wakeup(void)
{ u8 data=0x0a;GS_WakeUp();//唤醒PAJ7620U2HAL_Delay(5);//唤醒时间>400usGS_WakeUp();//再次唤醒,以确认PAJ7620U2正常工作HAL_Delay(5);//唤醒时间>400uspaj7620u2_selectBank(BANK0);//进入BANK0寄存器区域data = GS_Read_Byte(0x00);//读取状态if(data!=0x20) return 0; //唤醒失败return 1;
}//PAJ7620U2初始化
//返回值:0:失败 1:成功
u8 paj7620u2_init(void)
{u8 i;u8 status;status = paj7620u2_wakeup();//唤醒PAJ7620U2if(!status) return 0;paj7620u2_selectBank(BANK0);//进入BANK0寄存器区域for(i=0;i<INIT_SIZE;i++){GS_Write_Byte(init_Array[i][0],init_Array[i][1]);//初始化PAJ7620U2}paj7620u2_selectBank(BANK0);//切换回BANK0寄存器区域return 1;
}//手势识别测试
void Gesture_test(void)
{u8 i;u8 status;u8 data[2]={0x00};u16 gesture_data;paj7620u2_selectBank(BANK0);//进入BANK0寄存器区域for(i=0;i<GESTURE_SIZE;i++){GS_Write_Byte(gesture_arry[i][0],gesture_arry[i][1]);//手势识别模式初始化}paj7620u2_selectBank(BANK0);//切换回BANK0寄存器区域i=0;while(1){if(mode=='c'){GS_Write_Byte(PAJ_SET_INT_FLAG1,0X00);//关闭手势识别中断输出GS_Write_Byte(PAJ_SET_INT_FLAG2,0X00);break;} status = GS_Read_nByte(PAJ_GET_INT_FLAG1,2,&data[0]);//读取手势状态 if(!status){ gesture_data =(u16)data[1]<<8 | data[0];if(gesture_data) {switch(gesture_data){case GES_UP:HAL_UART_Transmit(&huart2,"UP\r\n",strlen("UP\r\n"),HAL_MAX_DELAY);break; //向上case GES_DOWM:HAL_UART_Transmit(&huart2,"Down\r\n",strlen("Down\r\n"),HAL_MAX_DELAY);break; //向下case GES_LEFT:HAL_UART_Transmit(&huart2,"Left\r\n",strlen("Left\r\n"),HAL_MAX_DELAY);break; //向左case GES_RIGHT:HAL_UART_Transmit(&huart2,"Right\r\n",strlen("Right\r\n"),HAL_MAX_DELAY);break; //向右 case GES_FORWARD:HAL_UART_Transmit(&huart2,"Forward\r\n",strlen("Forward\r\n"),HAL_MAX_DELAY);break; //向前case GES_BACKWARD:HAL_UART_Transmit(&huart2,"Backward\r\n",strlen("Backward\r\n"),HAL_MAX_DELAY);break;//向后case GES_CLOCKWISE:HAL_UART_Transmit(&huart2,"Clockwise\r\n",strlen("Clockwise\r\n"),HAL_MAX_DELAY);break; //顺时针case GES_COUNT_CLOCKWISE:HAL_UART_Transmit(&huart2,"AntiClockwise\r\n",strlen("AntiClockwise\r\n"),HAL_MAX_DELAY);break;//逆时针case GES_WAVE:HAL_UART_Transmit(&huart2,"Wave\r\n",strlen("Wave\r\n"),HAL_MAX_DELAY);break;//挥动default: break;} } }HAL_Delay(500);}
}//接近检测测试
void Ps_test(void)
{u8 i;u8 data[2]={0x00};u8 obj_brightness=0;u16 obj_size=0;paj7620u2_selectBank(BANK0);//进入BANK0寄存器区域for(i=0;i<PROXIM_SIZE;i++){GS_Write_Byte(proximity_arry[i][0],proximity_arry[i][1]);//接近检测模式初始化}paj7620u2_selectBank(BANK0);//返回BANK0寄存器区域i=0;while(1){ if(mode=='c') break;obj_brightness = GS_Read_Byte(PAJ_GET_OBJECT_BRIGHTNESS);//读取物体亮度data[0] = GS_Read_Byte(PAJ_GET_OBJECT_SIZE_1);//读取物体大小data[1] = GS_Read_Byte(PAJ_GET_OBJECT_SIZE_2);obj_size = ((u16)data[1] & 0x0f)<<8 | data[0];sprintf(show,"light:%d,size:%d\r\n",obj_brightness,obj_size);HAL_UART_Transmit(&huart2,show,strlen(show),HAL_MAX_DELAY);HAL_Delay(500);}}
//PAJ7620U2传感器测试
void paj7620u2_sensor_test(void)
{ while(1){switch(mode){case 'h': Gesture_test(); break;//手势检测模式case 'n': Ps_test(); break;//接近检测模式 }HAL_Delay(50); }
}void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart)
{if (huart->Instance == USART2){mode = RxOneByte; // 上一步启动 DMA/IT 时指定的接收变量HAL_UART_Transmit(&huart2,&mode,1,HAL_MAX_DELAY);// 再次开启下一个字节接收HAL_UART_Receive_IT(&huart2, &RxOneByte, 1);}
}六、讲解视频
https://www.bilibili.com/video/BV1Hd1LBcEVj/?spm_id_from=333.1387.upload.video_card.click&vd_source=f7dfe1b14f260b9cc3a146d2dbfd0719