Ubuntu 20.04中复现LeRobot-ALOHA的仿真
在Ubuntu 20.04中复现LeRobot-ALOHA的仿真环境,2025.11.5号版本
1.系统准备与环境配置 🛠️
首先,我们需要准备好基础系统和Python环境。
-
系统更新:打开终端,更新你的Ubuntu 20.04系统并安装必要的依赖。
sudo apt update && sudo apt upgrade -y sudo apt install -y git wget curl build-essential python3 python3-pip python3-venv -
安装Miniconda:接着安装Miniconda来管理Python环境,这能有效避免依赖冲突。
wget https://repo.anaconda.com/miniconda/Miniconda3-latest-Linux-x86_64.sh bash Miniconda3-latest-Linux-x86_64.sh # 安装完成后,重启终端或运行 `source ~/.bashrc` 使配置生效 -
创建Conda环境:创建一个独立的Python 3.10环境并激活它。
conda create -y -n lerobot python=3.10 conda activate lerobot激活后,终端提示符前通常会显示
(lerobot),表示你已进入该环境。 -
安装FFmpeg:FFmpeg是处理视频和数据集可视化的常用工具,建议安装。
conda install ffmpeg -c conda-forge
2.安装LeRobot与仿真依赖
环境准备好后,我们来安装LeRobot核心库及其仿真组件。
-
克隆LeRobot仓库:
git clone https://github.com/huggingface/lerobot.git cd lerobot -
安装LeRobot核心库:以“可编辑”模式安装,便于后续可能的开发和修改。
pip install -e . -
安装仿真环境依赖:对于仿真,你需要安装特定的Gymnasium环境。根据,可以使用以下命令安装ALOHA和PushT仿真环境:
pip install -e ".[aloha, pusht]"这个命令会安装运行ALOHA仿真所需的
gym-aloha等依赖。如果网络原因导致安装缓慢或失败,可以考虑使用国内的PyPI镜像源。
3.运行与体验仿真环境 🎮
安装成功后,让我们启动仿真环境,直观地感受一下。
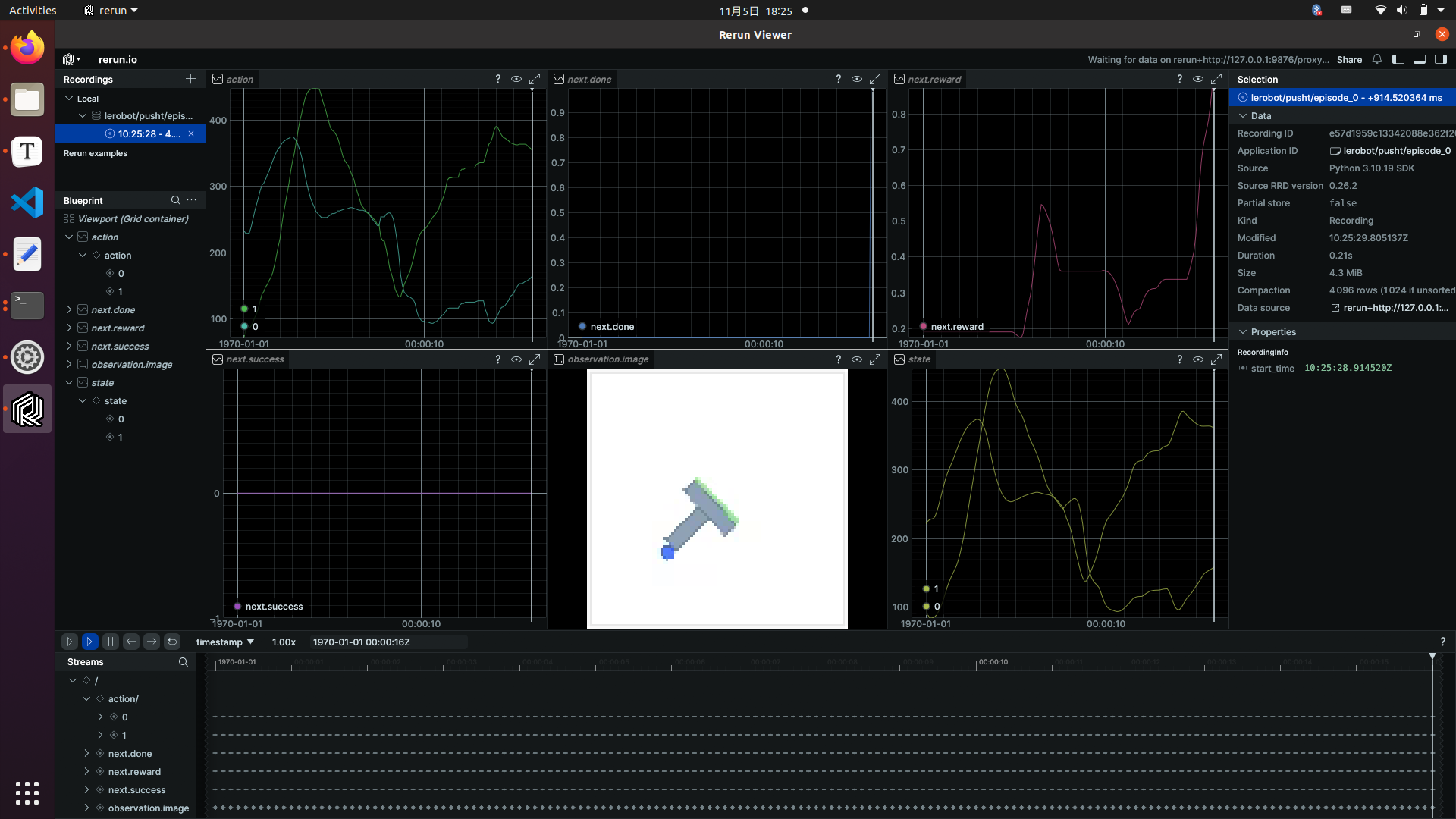
- 可视化示例数据集:LeRobot提供了一些预录制的仿真数据集,你可以通过脚本查看,这有助于理解数据和任务。
注意,2025.11.5使用版本要使用lerobot-dataset-viz 启动
lerobot-dataset-viz --repo-id lerobot/pusht --episode-index 0
如果卡住不动,执行下面命令
使用国内镜像(如果适用):
export HF_ENDPOINT=https://hf-mirror.com
- 启动ALOHA仿真环境:你可以通过以下命令启动一个带图形界面的ALOHA仿真环境(例如传输方块的任务):
进入到https://github.com/huggingface/gym-aloha
新建example.py
内容如下
# example.py
import imageio
import gymnasium as gym
import numpy as np
import gym_alohaenv = gym.make("gym_aloha/AlohaInsertion-v0")
observation, info = env.reset()
frames = []for _ in range(1000):action = env.action_space.sample()observation, reward, terminated, truncated, info = env.step(action)image = env.render()frames.append(image)if terminated or truncated:observation, info = env.reset()env.close()
imageio.mimsave("example.mp4", np.stack(frames), fps=25)
然后 执行
python example.py
会在example.py文件夹下生成example.mp4
视频截图如下