2023年IEEE TCYB SCI1区TOP,基于改进多目标群体智能算法的灾难应急响应精确无人机三维路径规划方法,深度解析+性能实测
目录
- 1.摘要
- 2. APPMS方法
- 3.多目标搜索
- 4.结果展示
- 5.参考文献
- 6.代码获取
- 7.算法辅导·应用定制·读者交流
1.摘要
无人机三维飞行路径规划是灾难应急响应中的关键挑,。理想路径应平衡飞行路径长度与地形威胁,以缩短飞行时间并减少碰撞风险。传统方法难以平衡这些因素,且缺乏实际约束,导致优化效果不佳。本文提出了一种基于改进多目标群体智能算法(APPMS)的精确路径规划方法,通过将路径规划转化为多目标优化问题,同时优化飞行路径长度和地形威胁度。采用改进的蚁群优化算法提升了全局与局部搜索能力。通过模拟实验和实际应急数据验证了该方法的有效性。
2. APPMS方法
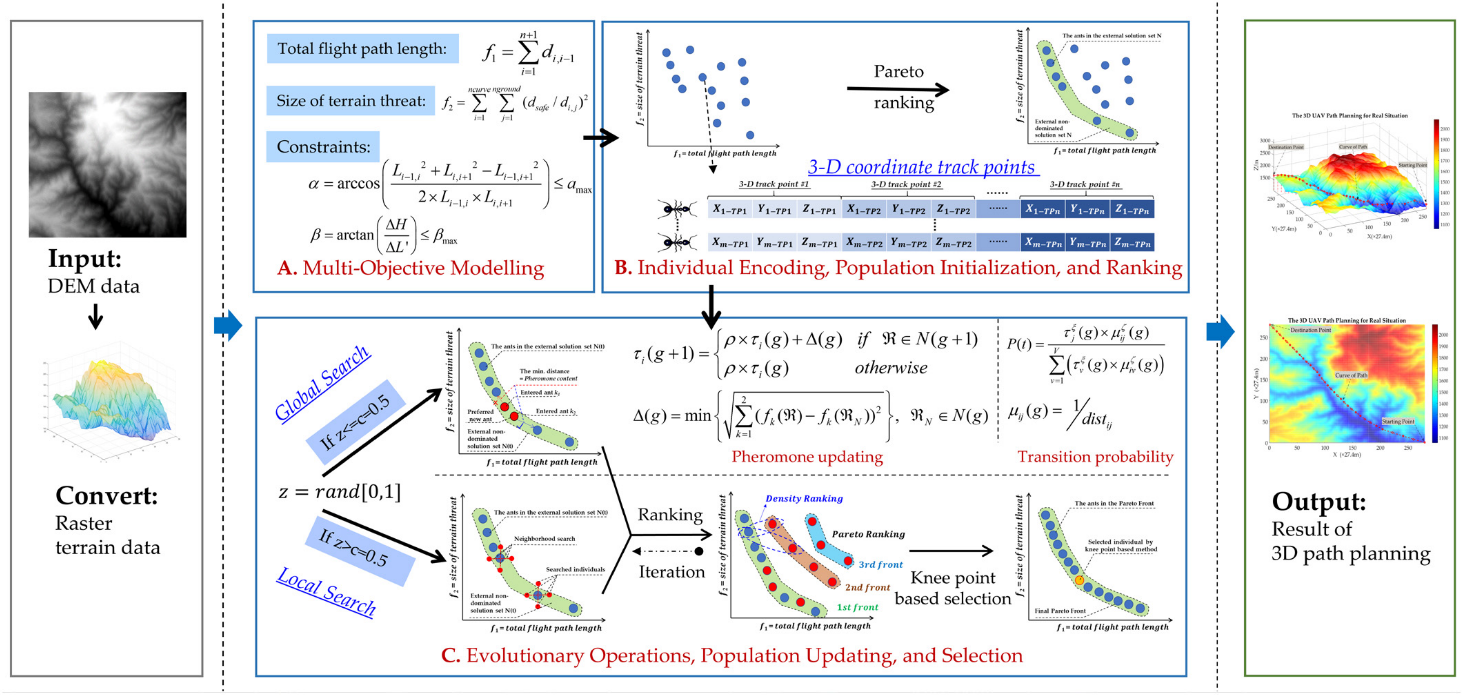
APPMS方法框架如图所示,主要包括三个步骤:1)基于约束的总飞行距离和地形威胁度的多目标建模;2)个体编码、种群初始化及初始路径排序;3)进化操作、种群更新与选择,优化搜索出的三维路径。
为了使无人机三维路径规划同时考虑总飞行路径长度和地形威胁度:
f1=∑i=1n+1di,i−1f_1=\sum_{i=1}^{n+1}d_{i,i-1} f1=i=1∑n+1di,i−1
f2=∑i=1n∑j=1ng(dsafe/Πi,j)2f_2=\sum_{i=1}^n\sum_{j=1}^{n_g}\left(d_{\mathrm{safe}}/\Pi_{i,j}\right)^2 f2=i=1∑nj=1∑ng(dsafe/Πi,j)2
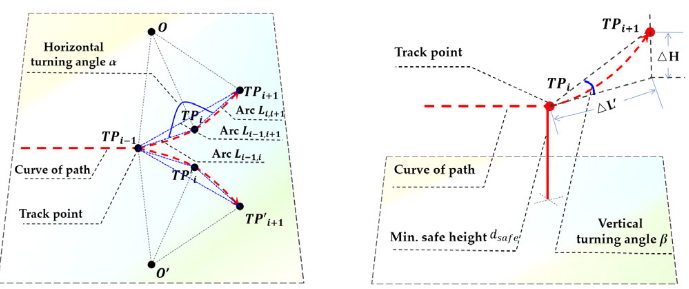
水平转角和垂直转角约束:
α=arccos(Li−1,i2+Li,i+12−Li−1,i+122×Li−1,i×Li,i+1)≤amax\alpha=\arccos\left(\frac{L_{i-1,i}^2+L_{i,i+1}^2-L_{i-1,i+1}^2}{2\times L_{i-1,i}\times L_{i,i+1}}\right)\leq a_{\max} α=arccos(2×Li−1,i×Li,i+1Li−1,i2+Li,i+12−Li−1,i+12)≤amax
β=arctan(ΔHΔL′)≤βmax\beta=\arctan\left(\frac{\Delta H}{\Delta L^{\prime}}\right)\leq\beta_{\max} β=arctan(ΔL′ΔH)≤βmax
3.多目标搜索
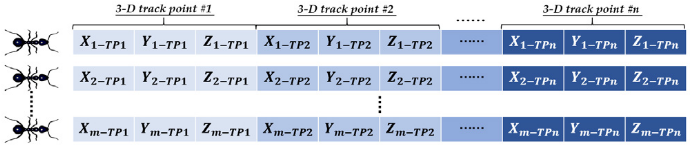
个体解编码与种群初始化:在基于种群的进化计算方法中,三维路径的解需要被编码为个体进行进化。每个蚂蚁表示一个路径,其中每个轨迹点的三维坐标被编码为个体解。种群中的解在满足飞行约束的情况下进行初始化,以确保解是可行的。

外部解集的排序:在搜索过程中,通过Pareto支配排序来区分优劣路径,并将当前的Pareto最优解存储在外部解集中。该解集引导蚂蚁在可行空间中搜索最优路径。
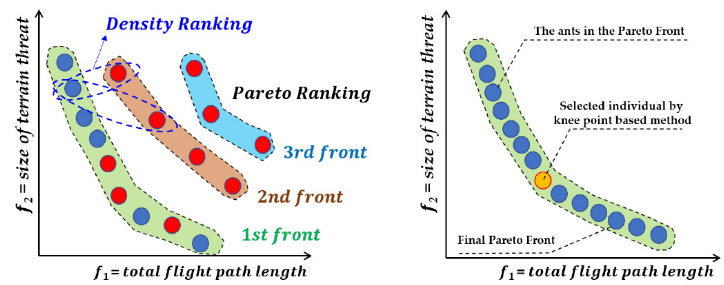
全局与局部搜索的联合进化操作与种群更新:在初始化和排序后,进行进化繁殖以改善路径规划。为避免陷入局部极值,采用全局与局部搜索机制。全局搜索旨在保持Pareto前沿的均匀分布和多样性,局部搜索则通过引入随机搜索策略,选择外部解集中的解并搜索其邻域,以加速收敛到全局最优解。
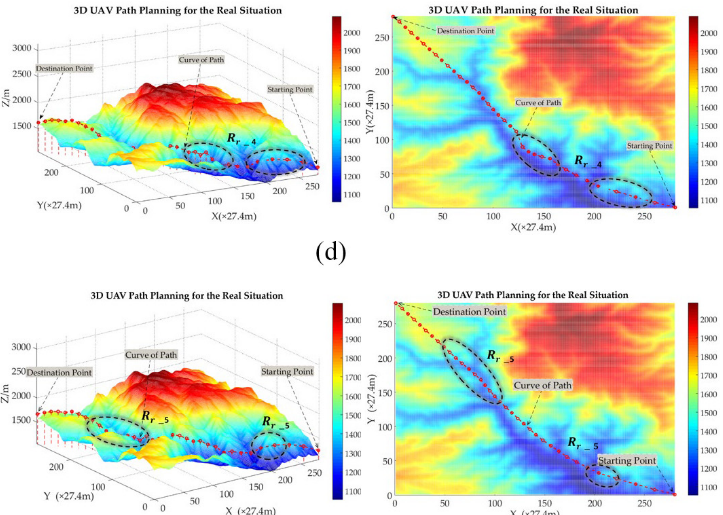
4.结果展示
5.参考文献
[1] Wan Y, Zhong Y, Ma A, et al. An accurate UAV 3-D path planning method for disaster emergency response based on an improved multiobjective swarm intelligence algorithm[J]. IEEE Transactions on Cybernetics, 2022, 53(4): 2658-2671.
6.代码获取
xx
7.算法辅导·应用定制·读者交流
xx