车联网-合规测试:扫描UDS服务 || 模糊测试.[caringcaribou]
车联网-合规测试:扫描UDS服务 || 模糊测试.
“车联网测试”,它是一个确保车联网产品质量与安全的综合性验证体系。它不仅包括满足法规要求的合规测试,也涵盖了保障用户体验的功能、性能、网络通信和安全等全方位的测试。合规测试是进入市场的“敲门砖”,而全面的车联网测试则是产品成功和赢得用户信任的基石。
目录:
扫描UDS服务.
(1)查看端口:
(2)加载内核模块.
(3)配置并启动 CAN 接口
(4)编辑配置文件
(5)验证接口状态
(6)扫描ECU响应ID和请求的仲裁 ID
(7)根据服务ID和响应ID,去扫描服务.
(8)扫描出结果就完成了.
模糊测试扫描(UDS诊断)
(1)开一个监听
(2)模糊测试.
(3)在测试的时候,查看车机的显示屏有没有异常.
扫描UDS服务.
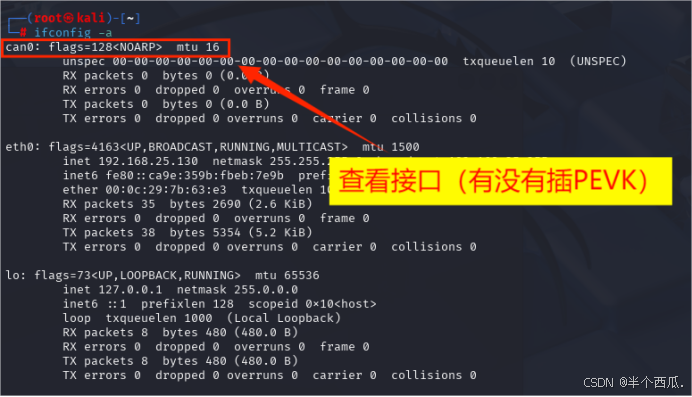
(1)查看端口:
ifconfig -a就是有没有识别到PEVK
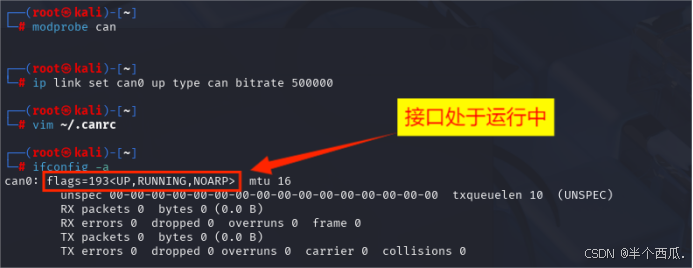
(2)加载内核模块.
modprobe can作用:动态加载 Linux 内核的 CAN 总线支持模块,为后续操作提供基础驱动。
(3)配置并启动 CAN 接口
ip link set can0 up type can bitrate 500000关键参数:
up:激活 can0 接口。
type can:指定接口类型为 CAN 总线。
bitrate 500000:设置通信波特率为 500 kbps(常见于汽车CAN总线)。
结果:此时 can0 接口已进入就绪状态。
(4)编辑配置文件
vim ~/.canrc[default]
Interface = socketcan
Channel = can0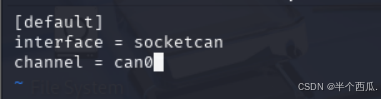
作用:通过 Vim 编辑器修改 CAN 工具的配置文件(如设置默认接口、日志路径等),属于个性化或自动化准备。
(5)验证接口状态
ifconfig -a 输出关键信息:
•flags=193<UP,RUNNING,NOARP>:接口处于运行中,但禁用ARP(CAN总线无需IP寻址)
(6)扫描ECU响应ID和请求的仲裁 ID
caringcaribou uds discovery
(7)根据服务ID和响应ID,去扫描服务.
caringcaribou uds services 0x710 0x610
(8)扫描出结果就完成了.
模糊测试扫描(UDS诊断)
(1)开一个监听
candump can0
(2)模糊测试.
caringcaribou fuzzer random
(3)在测试的时候,查看车机的显示屏有没有异常.
参考链接:https://www.eet-china.com/mp/a255122.html
参考链接:https://github.com/CaringCaribou/caringcaribou/blob/master/documentation/fuzzer.md