CANoe学习(二)使用CANdb++制作dbc
目录
- CANoe学习(二):使用CANdb++制作DBC数据库
- 一、什么是DBC文件?
- 二、使用CANdb++制作DBC数据库
- 2.1 创建DBC数据库
- 2.2 定义CAN信号(Signal)
- 2.3 创建CAN报文(Message)
- 2.4 导入DBC到CANoe项目
- 三、关键注意事项
- 附:学习参考资源
CANoe学习(二):使用CANdb++制作DBC数据库
一、什么是DBC文件?
在开始操作前,先简单说明DBC文件的作用:DBC(Database CAN)是CAN总线网络的"语言字典",它定义了总线上报文的ID、信号的位定义、数据格式(如分辨率、偏移量)等关键信息。所有节点(如ECU、传感器)通过DBC文件理解总线上的信号含义,是CANoe等工具进行仿真、分析的基础。
二、使用CANdb++制作DBC数据库
2.1 创建DBC数据库
-
打开CANoe软件,在顶部工具栏切换至「Tools」,点击「CANdb++ Editor」启动数据库编辑工具。

-
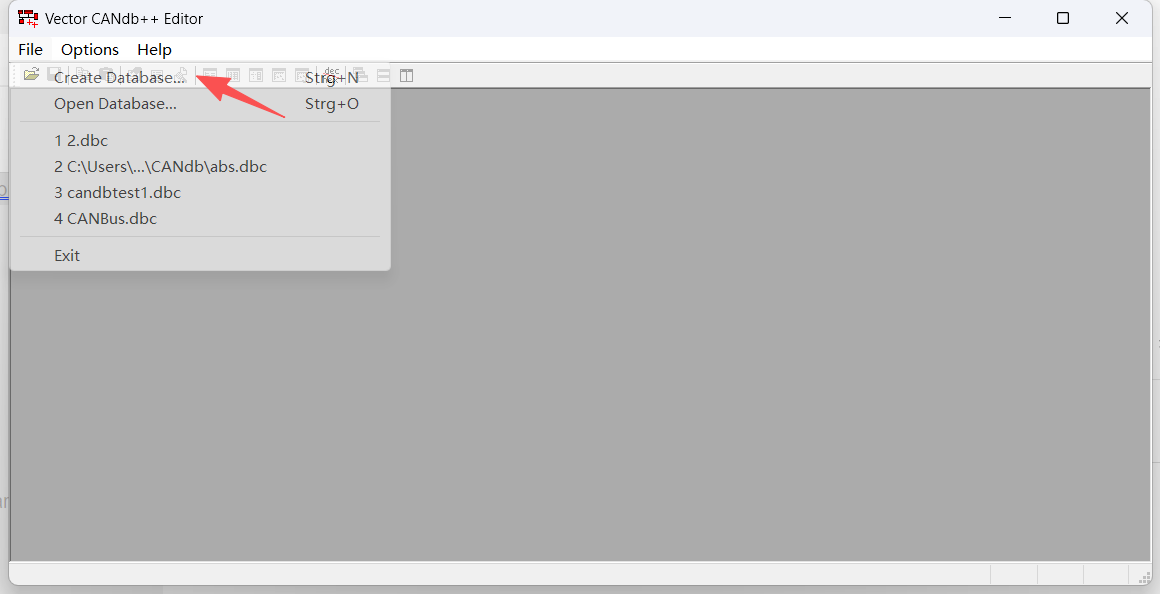
点击左上角「File」→「Create Database」,新建数据库文件。
-
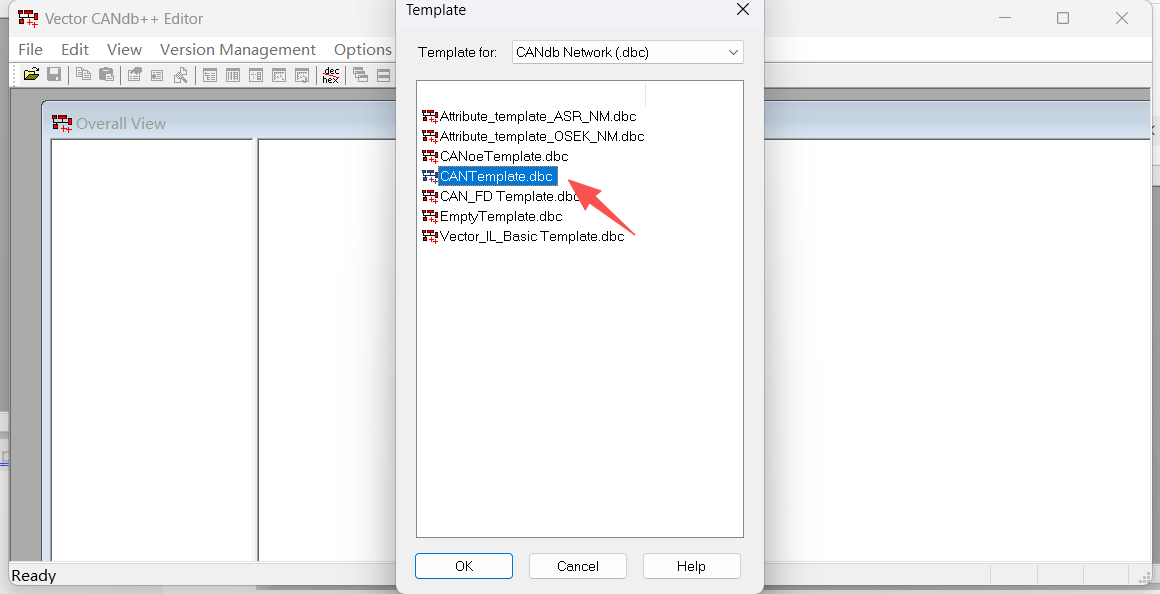
选择标准模板「CANTemplate.dbc」(包含基础CAN协议框架,避免从零配置),点击确认完成创建。
2.2 定义CAN信号(Signal)
信号是DBC的核心,需明确其数据格式、物理意义。以发动机管理系统相关信号为例:
-
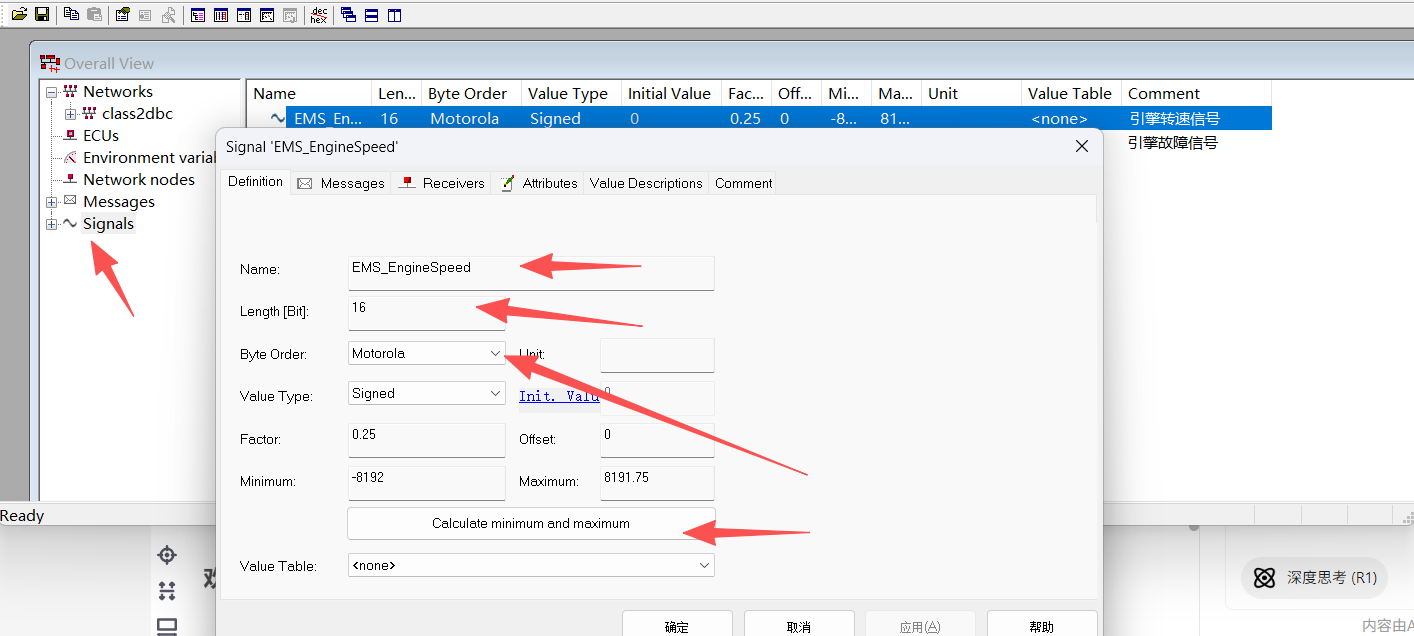
新建信号:右键左侧「Signals」→「New」,创建第一个信号。
- 命名规则:建议采用「模块_功能」格式(如
EMS_EngineSpeed),其中EMS指发动机管理系统(Engine Management System),清晰体现信号来源和含义。 - 数据格式:
- 选择「Motorola」(大端模式,即高位字节先传输,汽车行业常用);
- 信号长度设为16bit(可覆盖0~32767的范围,满足多数电动车电机转速上限需求)。
- 物理值转换:
- 设置
Factor(系数)为0.25,Offset(偏移量)为0。 - 物理值计算公式:
实际值 = 原始值 × Factor + Offset,此处即「实际转速 = 信号原始值 × 0.25」,用于将16bit整数转换为更精细的浮点转速(如原始值为4000时,实际转速为1000r/min)。
- 设置
- 备注:添加描述「发动机管理系统输出的当前转速(单位:r/min)」,方便后期维护。
- 命名规则:建议采用「模块_功能」格式(如
-
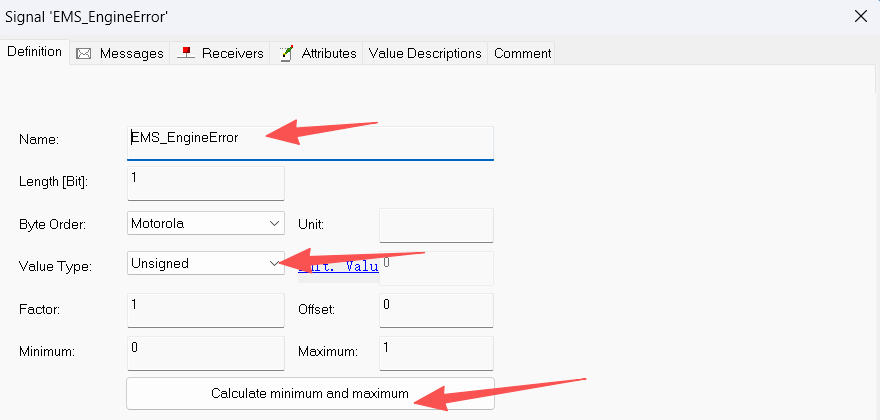
添加故障信号:同理创建
EMS_EngineError信号,用于标识发动机故障状态。- 长度设为1bit(仅需0/1表示正常/故障);
- 数据格式选择「Motorola」(大端模式);
- 备注「发动机故障状态(0=正常,1=故障)」。
2.3 创建CAN报文(Message)
报文是信号的载体,一个报文可包含多个信号(需注意总长度不超过8字节,即64bit)。
-
新建报文:右键左侧「Messages」→「New」,配置报文基本信息:
- 命名规则:建议采用「模块_报文ID」格式(如
EMS_0x1),0x1为报文ID(需确保在总线上唯一); - DLC(数据长度码)设为8(默认值,可自动适配信号总长度,若信号总长度≤8字节则无需修改)。
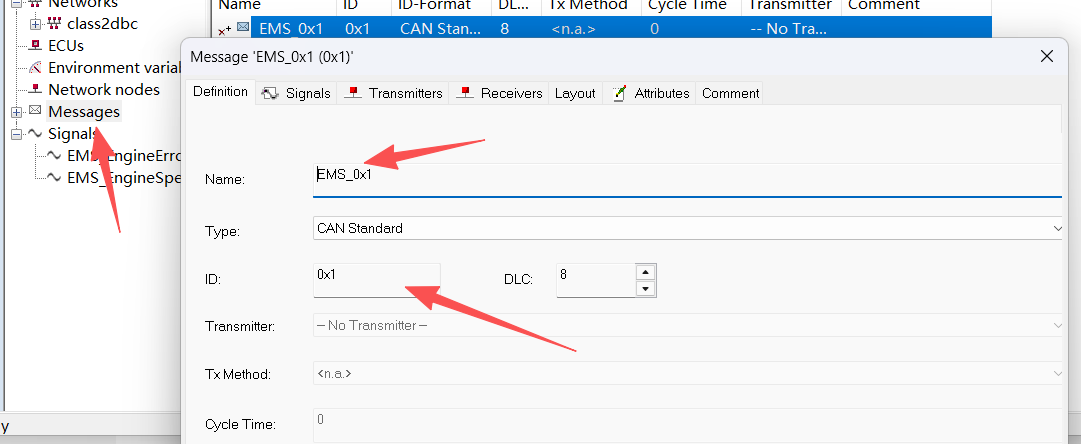
- 命名规则:建议采用「模块_报文ID」格式(如
-
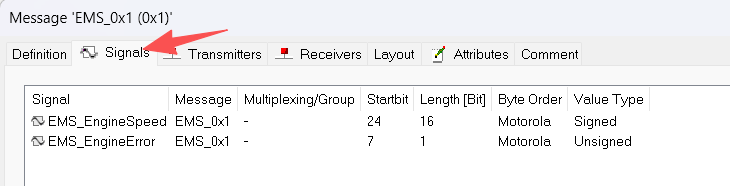
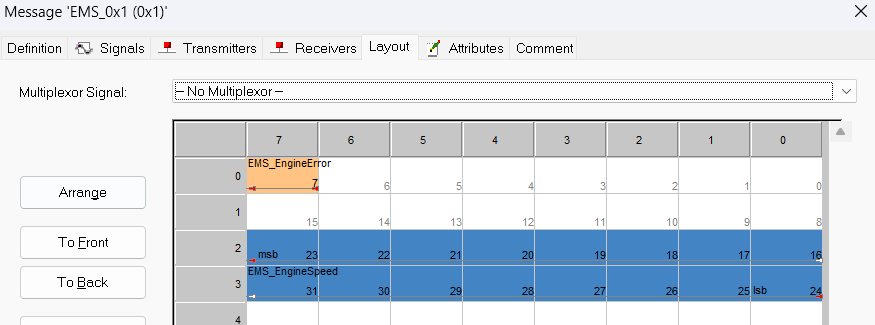
关联信号到报文:
- 选中创建的报文,右键「Add Signal」,将上述两个EMS信号添加到报文中;
- CANdb++会自动分配信号在报文中的起始位(可手动调整,需避免信号重叠)。
2.4 导入DBC到CANoe项目
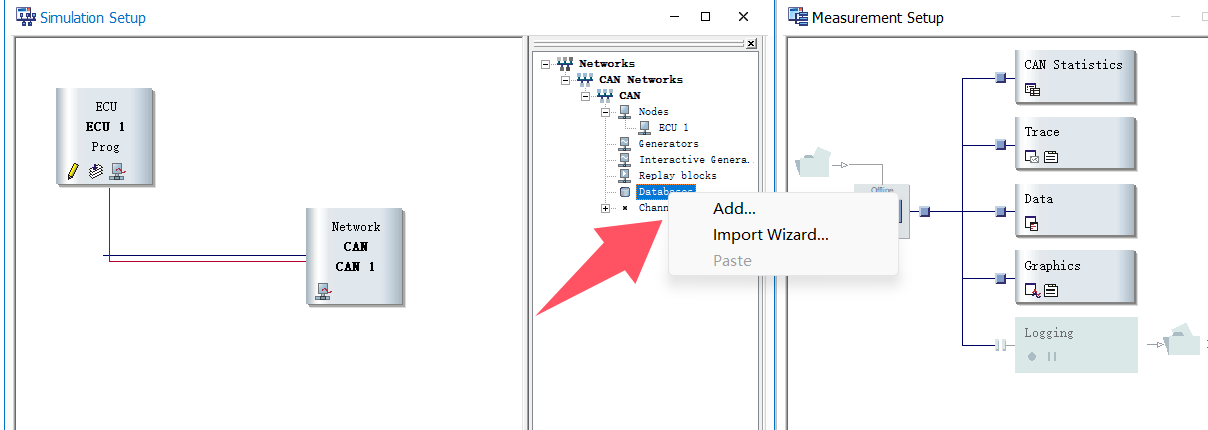
- 保存DBC文件(建议命名为
EMS_Demo.dbc,与功能关联); - 返回CANoe主界面,右键左侧「Databases」→「Add Database」,选择保存的DBC文件即可完成导入。
三、关键注意事项
- 信号命名规范:保持一致性(如统一使用下划线分隔、模块名缩写固定),避免后期混淆;
- 数据长度设计:根据信号实际范围选择bit长度(如转速用16bit,开关量用1bit),避免浪费总线带宽;
- 字节序选择:汽车行业中,多字节信号优先用Motorola格式,需与实际ECU保持一致。
附:学习参考资源
- CANoe入门教程(B站视频)
- 汽车CAN总线信号定义详解(知乎)
- CANdb++官方文档(Vector官网)
欢迎大家在评论区交流Candb制作过程中遇到的问题,共同进步!(* ^ ω ^)