3、电机控制——VF控制学习总结
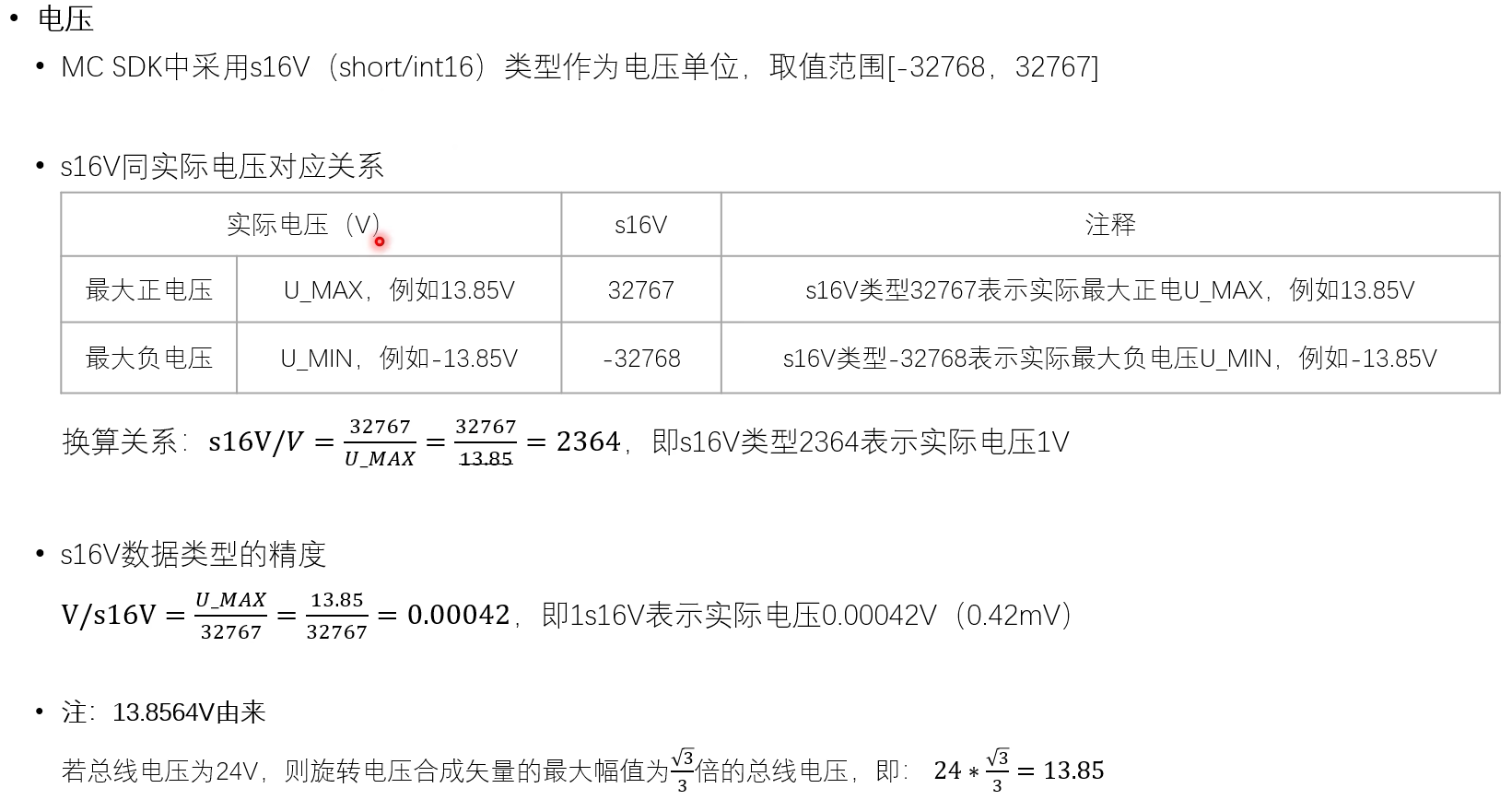
1、定点化
将浮点数乘以一个比例因子并取整,得到一个整数表示。这整数表示实际值的放大或缩小量,因此可以通过整数运算来代替浮点运算,从而提高计算效率。

MC SDK的定点化方法将会波及电流PI控制,SVPWM环节;
2、simulink建模
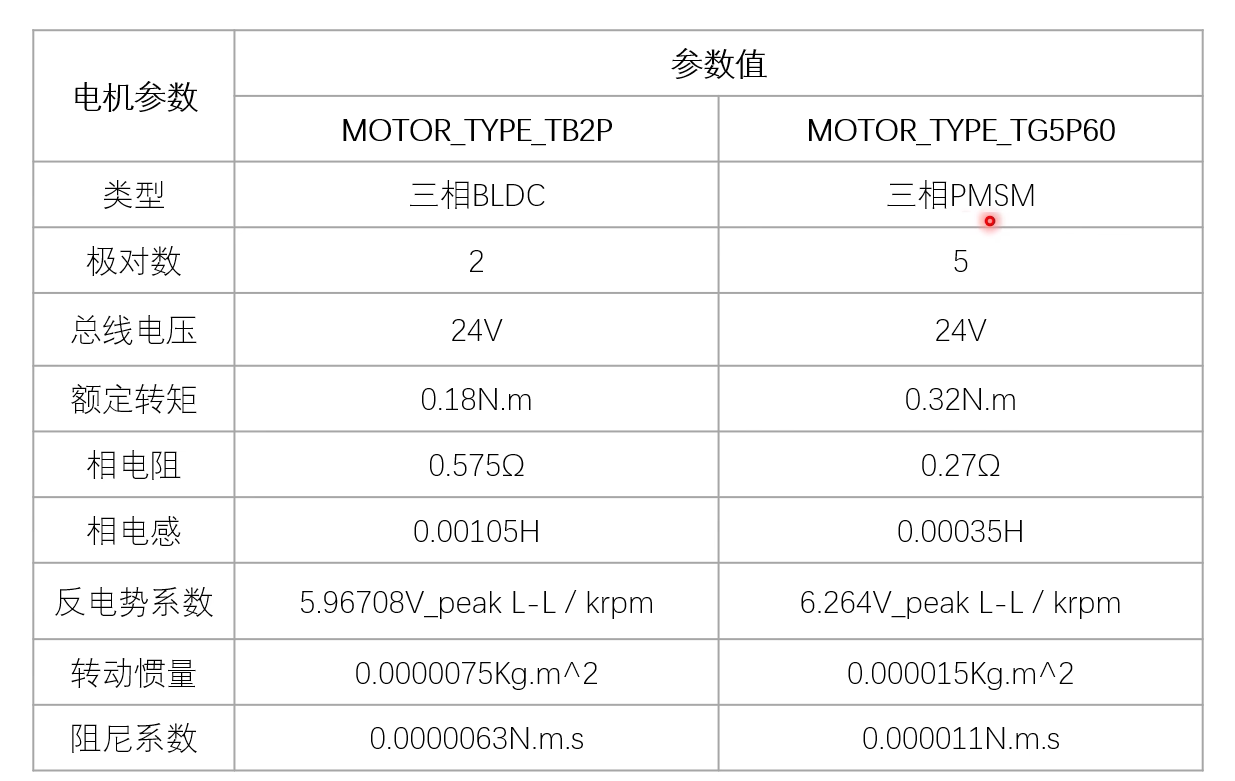
2.1控制对象参数
2.2仿真条件设置

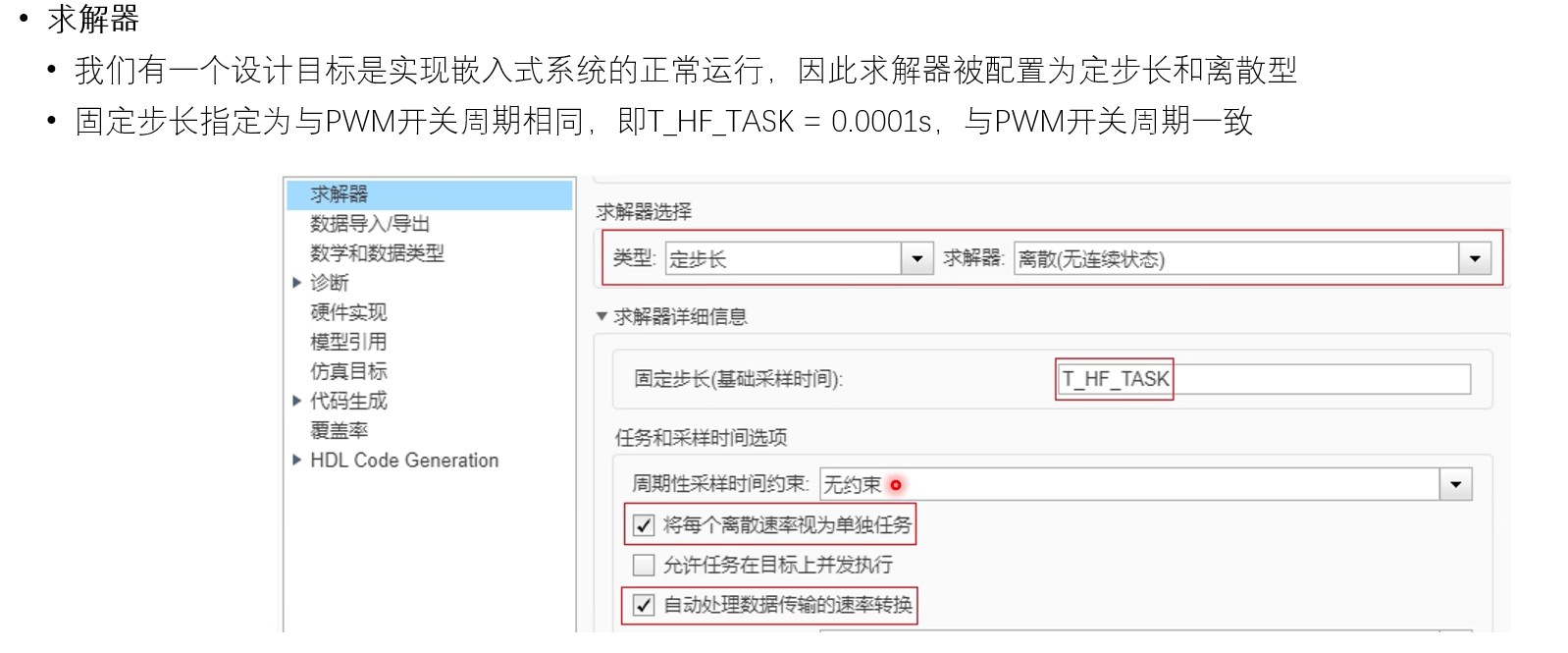
高频任务采样时间与PWM频率保持一致;
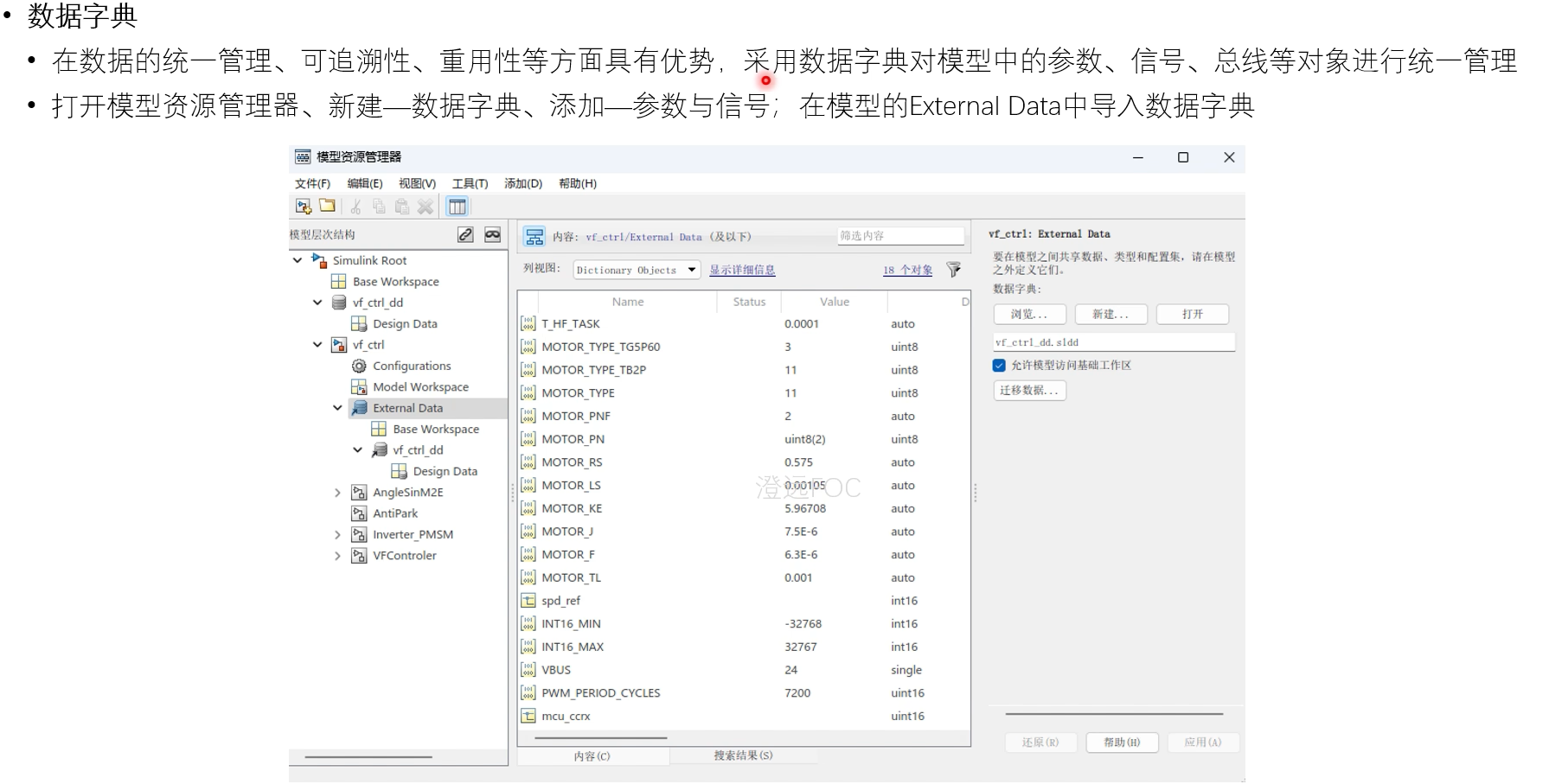
2.3数据字典
2.4系统框架
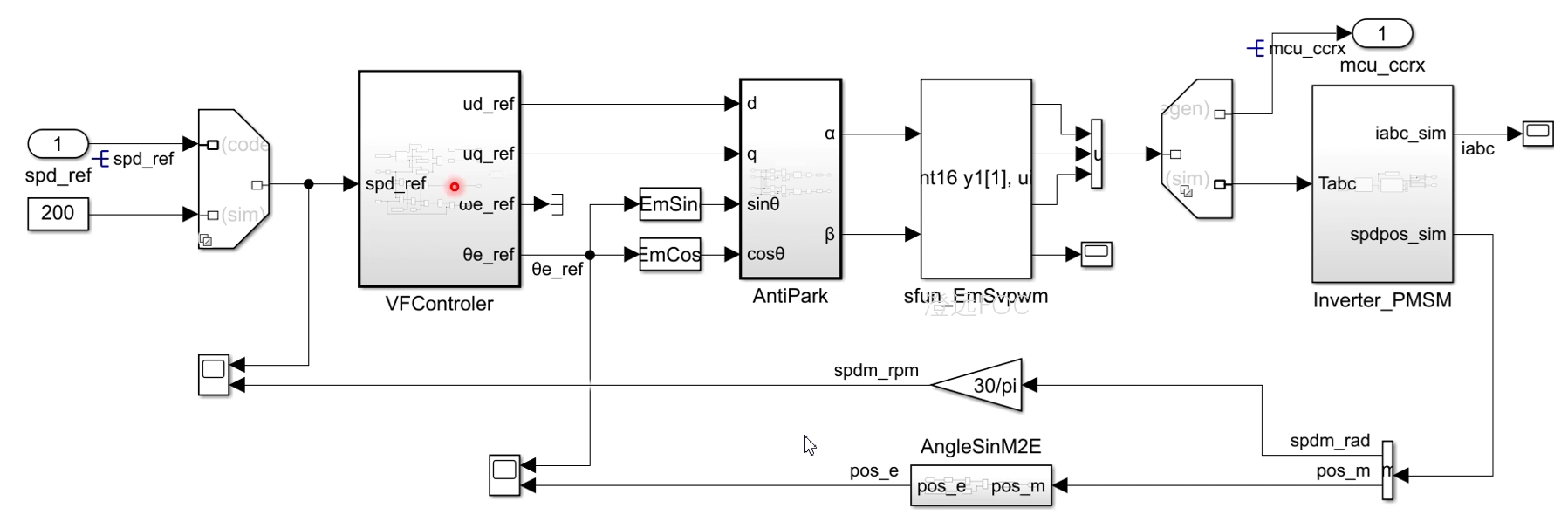
VF控制器根据输入的参考转速,自主生成一组频率对应的电压和电角度,通过ud等于0的策略,使uq拖动旋转,最终形成一个旋转的合成电压矢量;
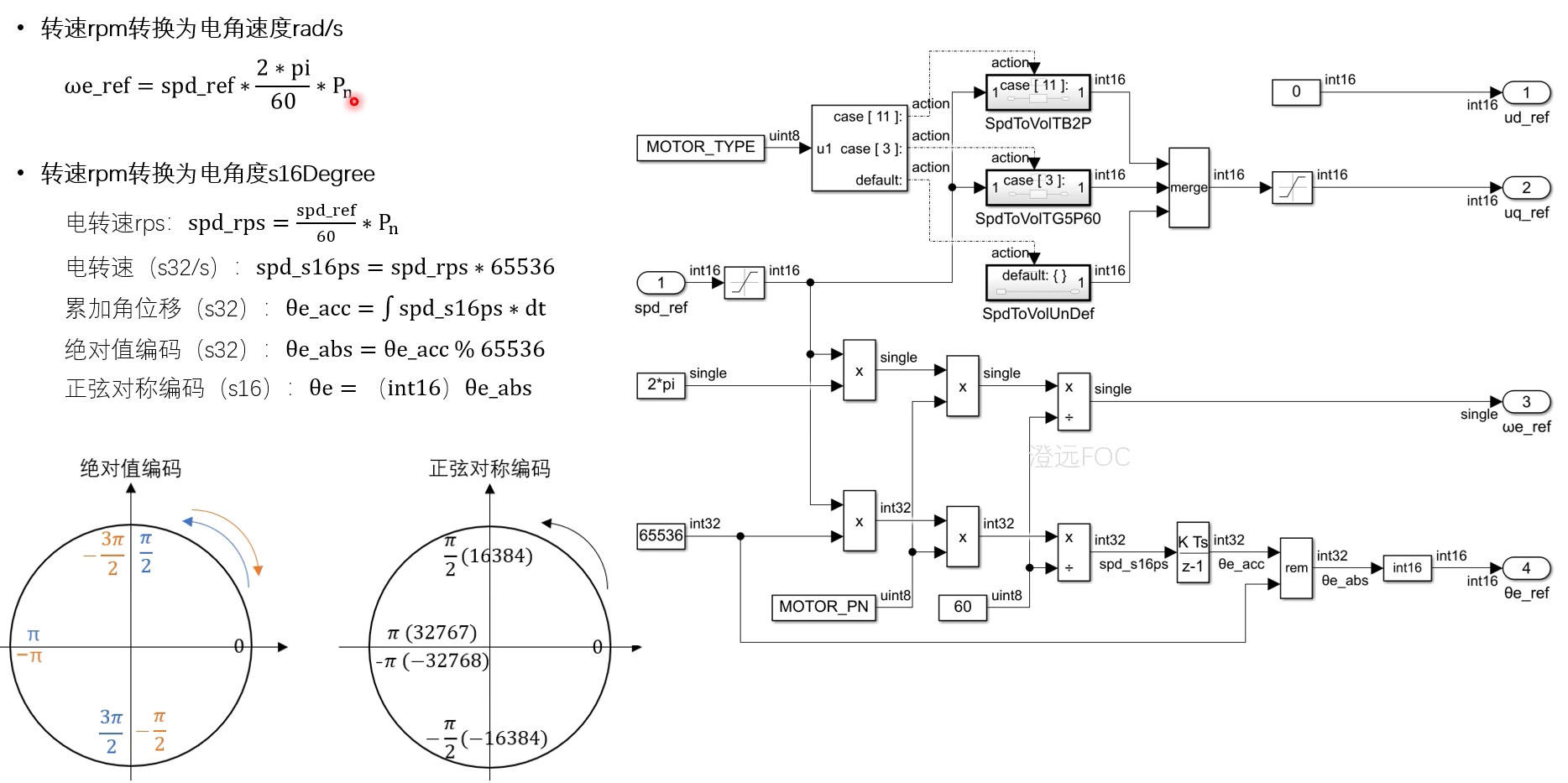
2.5VF控制器建模
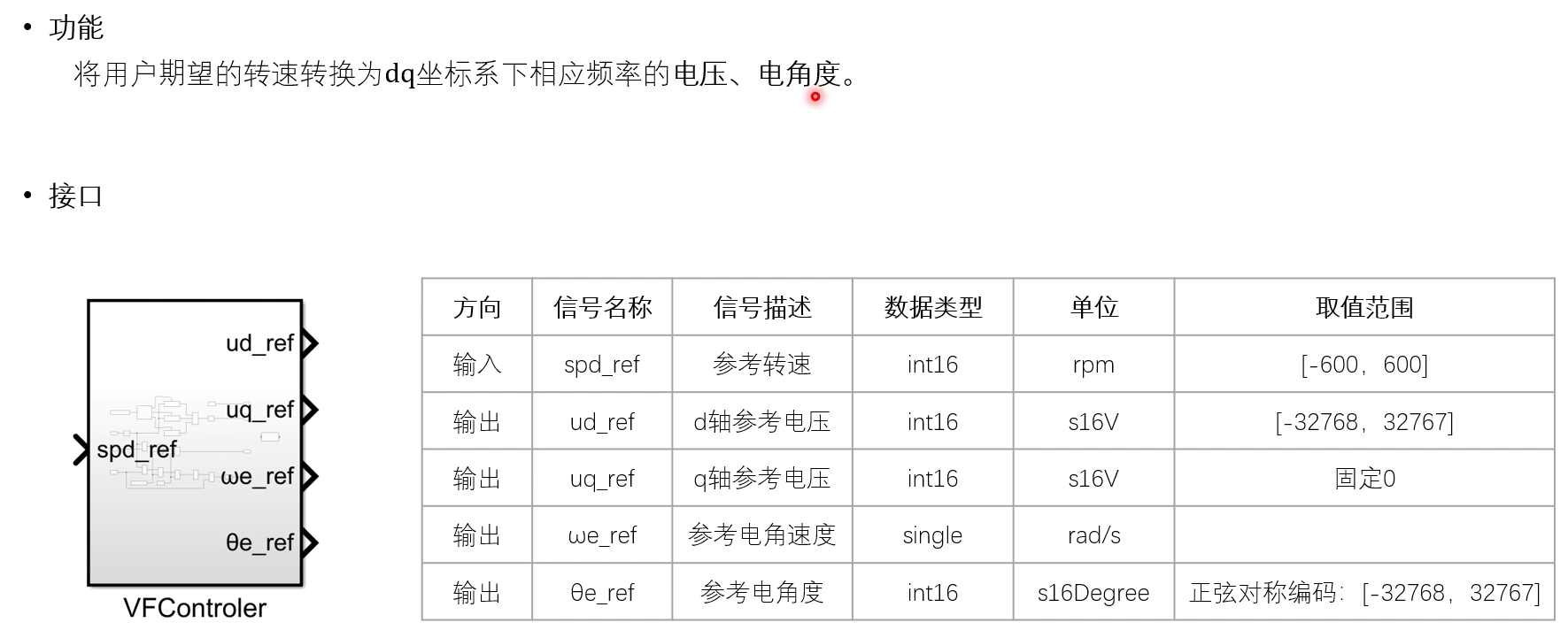
根据转速,可以算出电角速度和电角度,如下
电角速度等于转速rpm除以60(1分钟=60秒),乘以2π(1秒转动一圈的弧度),此时就是机械角速度,再乘以极对数就是电角速度;
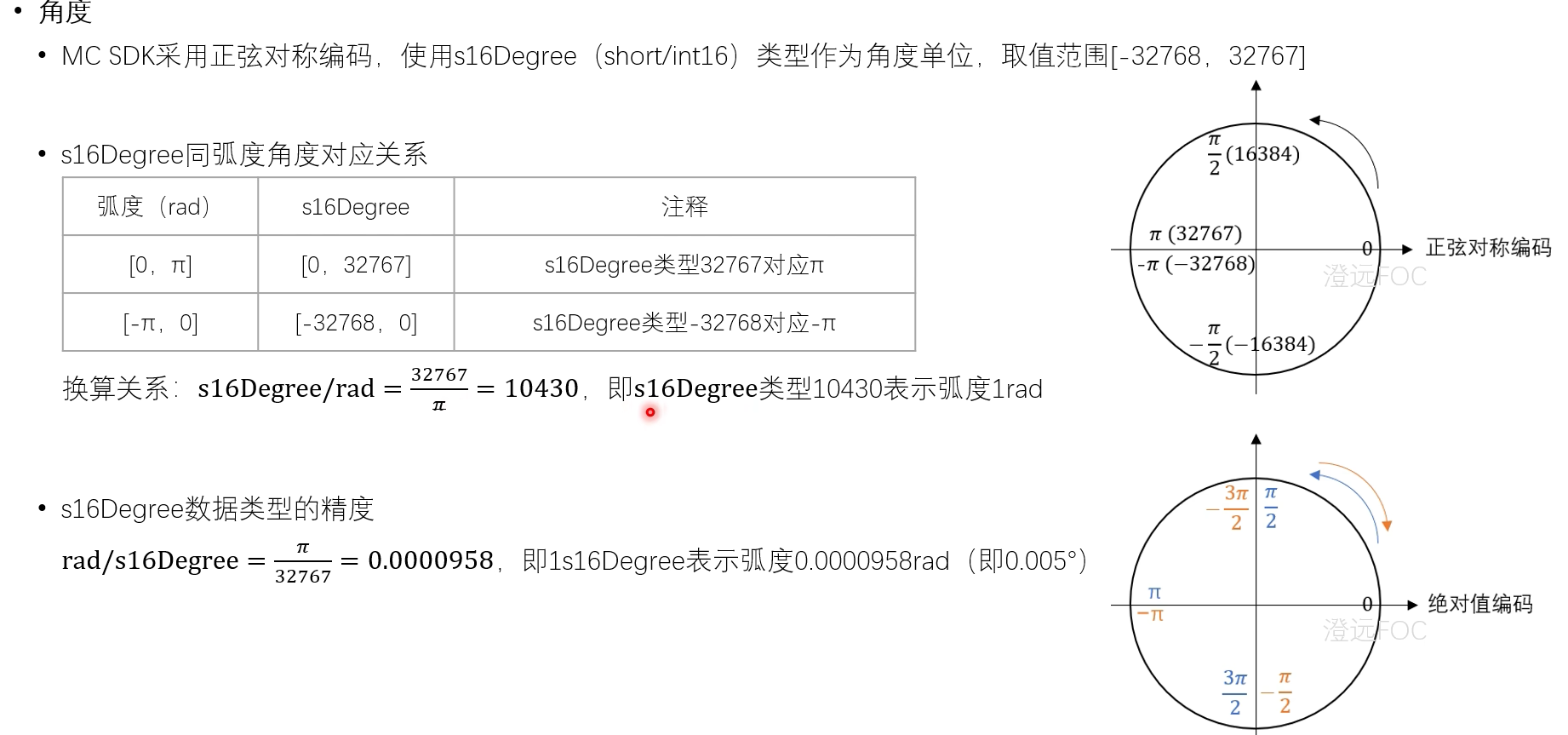
电角度:rmp除以60秒等于每秒的机械转速,乘以60等于每秒的电转速,电转速转换单位乘以65536;速度的积分就是位移,对电转速进行积分就得到了以S16Degree为单位的累加角位移,累加角位移里面包含转过多少转和当前所在位置;对累加角位移进行65536的取余,就可到了它当前在圆周上的所在绝对位置;把绝对位置变为正弦对称编码,只需强制转化为有符号16位整形的数据类型即可;
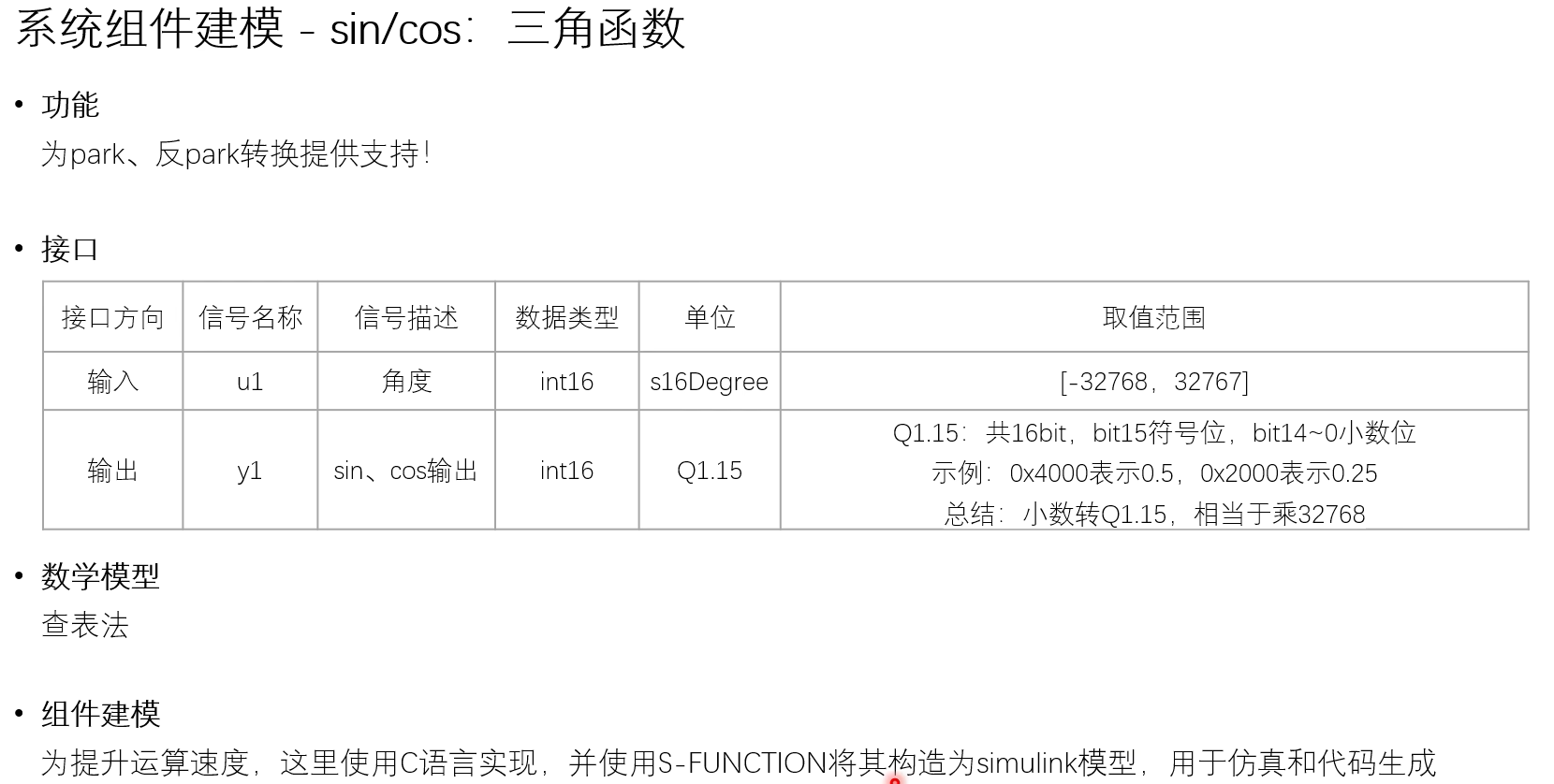
2.6三角函数组件建模
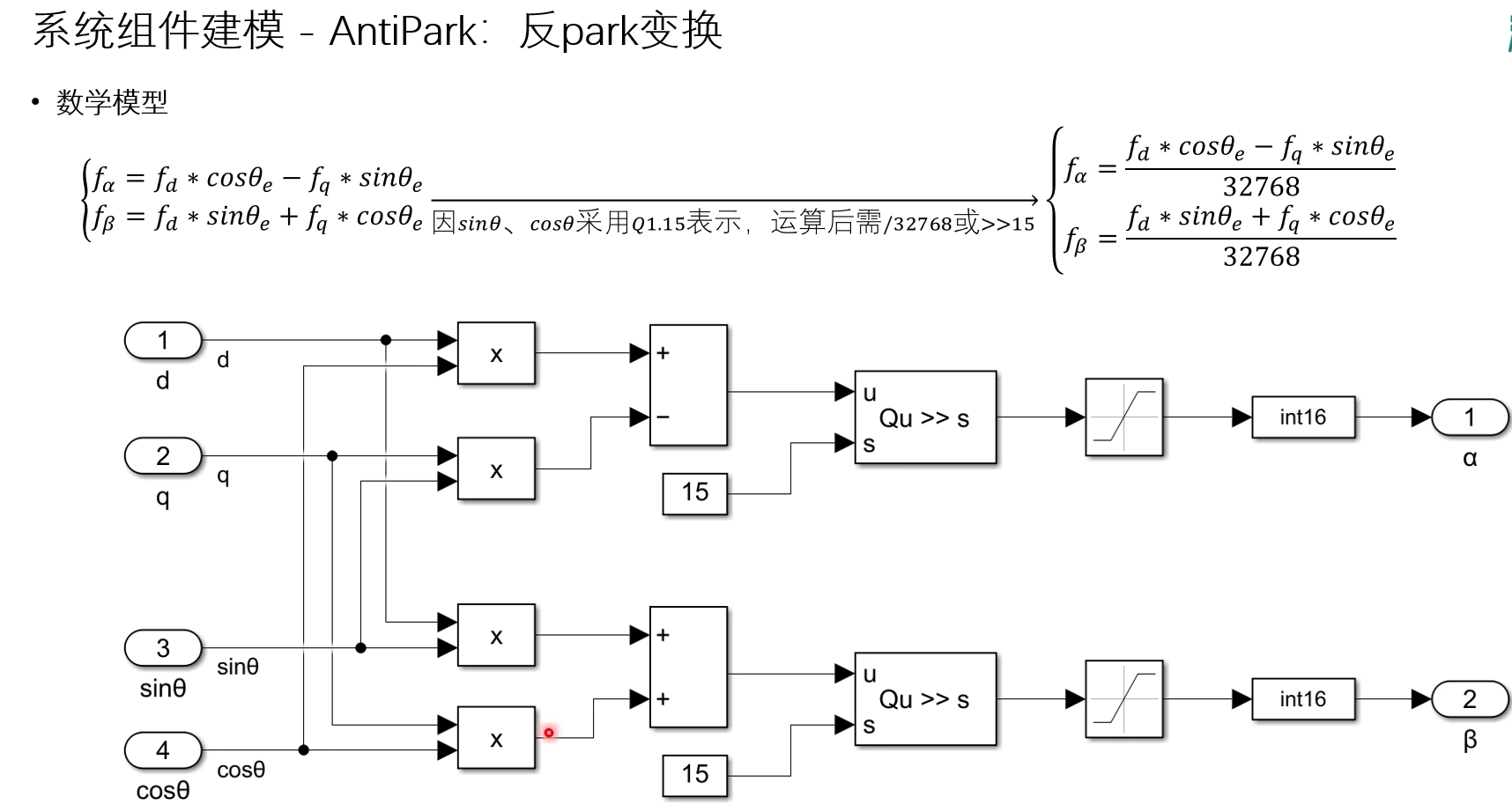
2.7反PARK建模
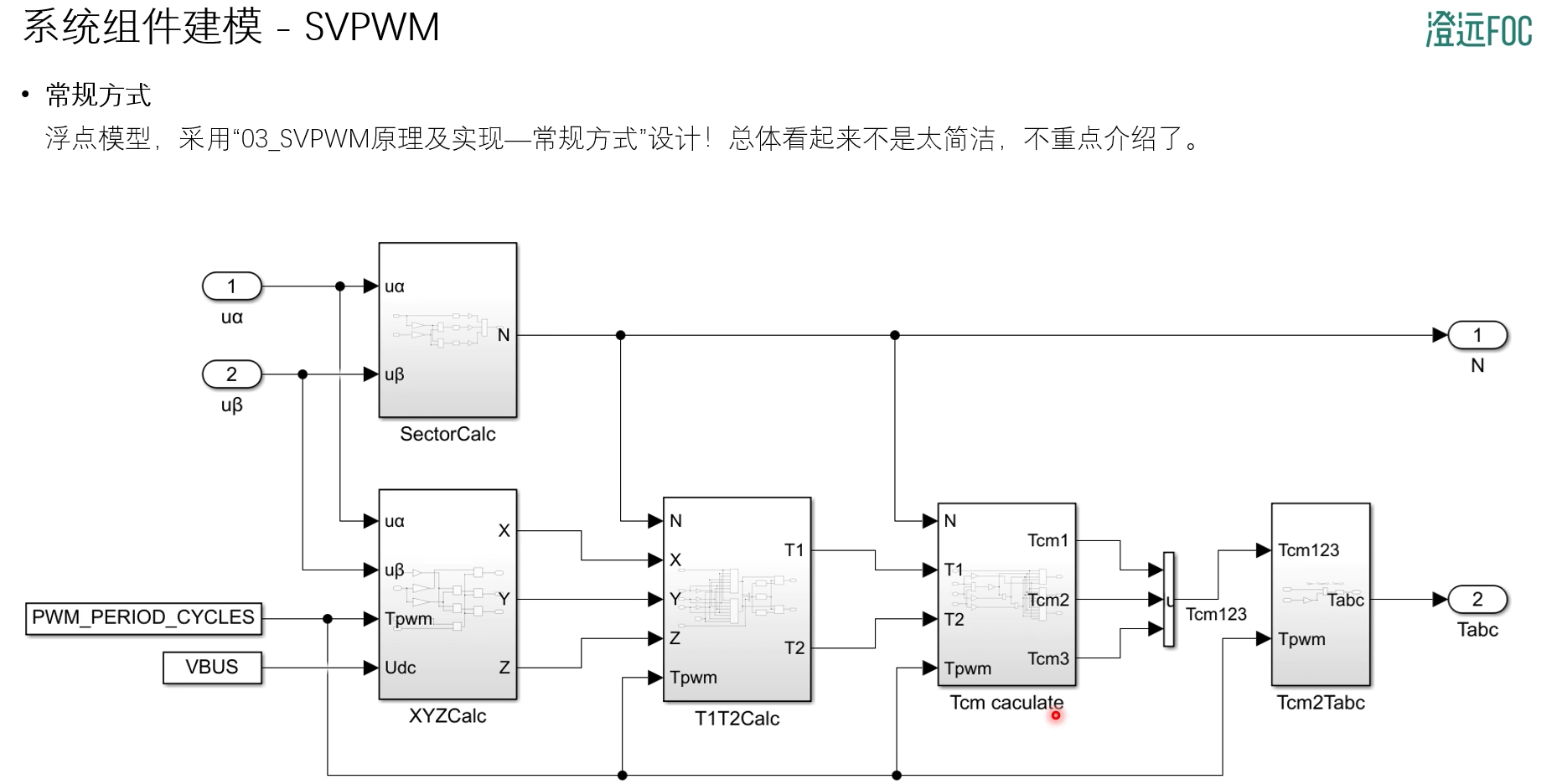
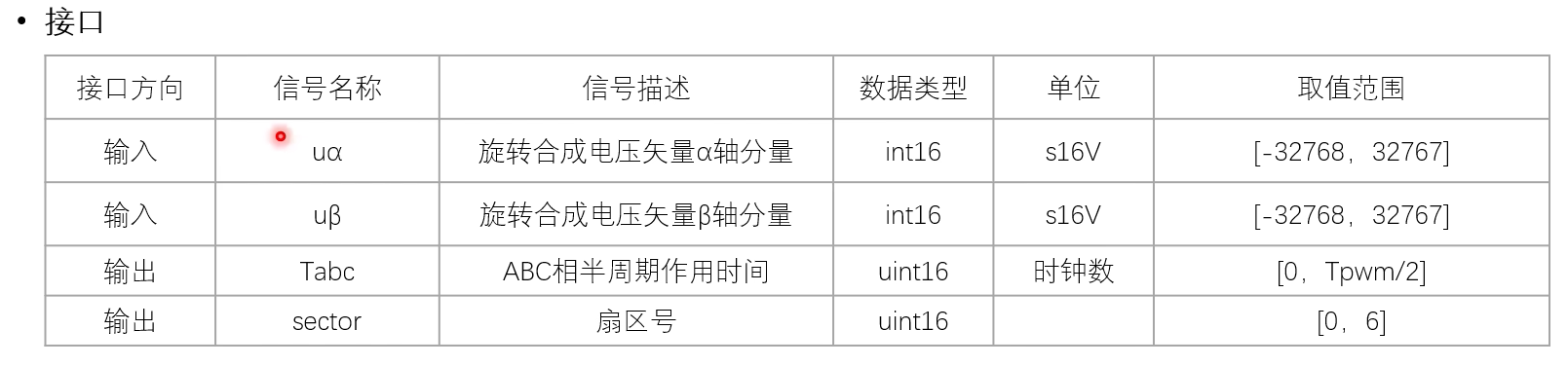
2.8SVPWM组件建模
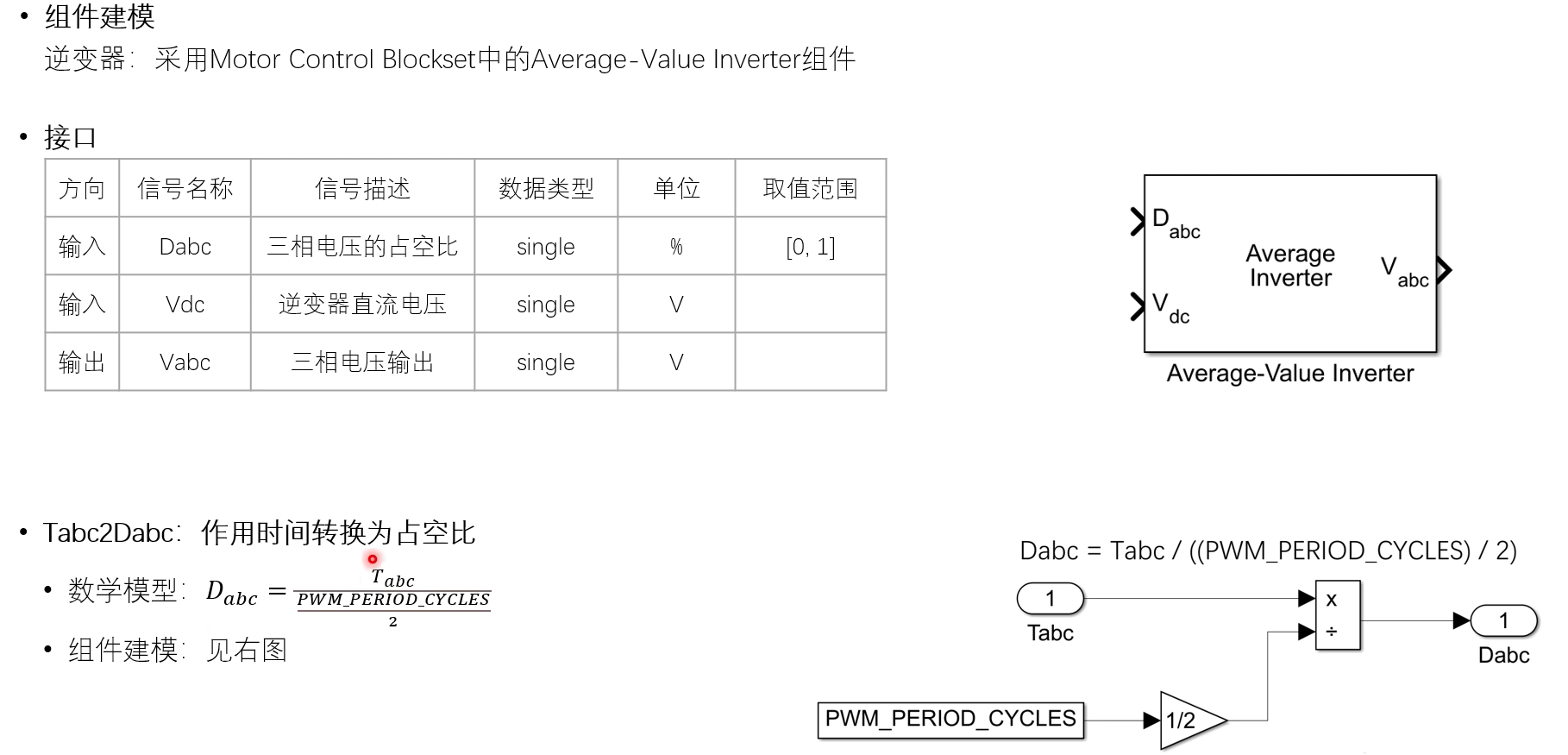
2.9逆变器组件
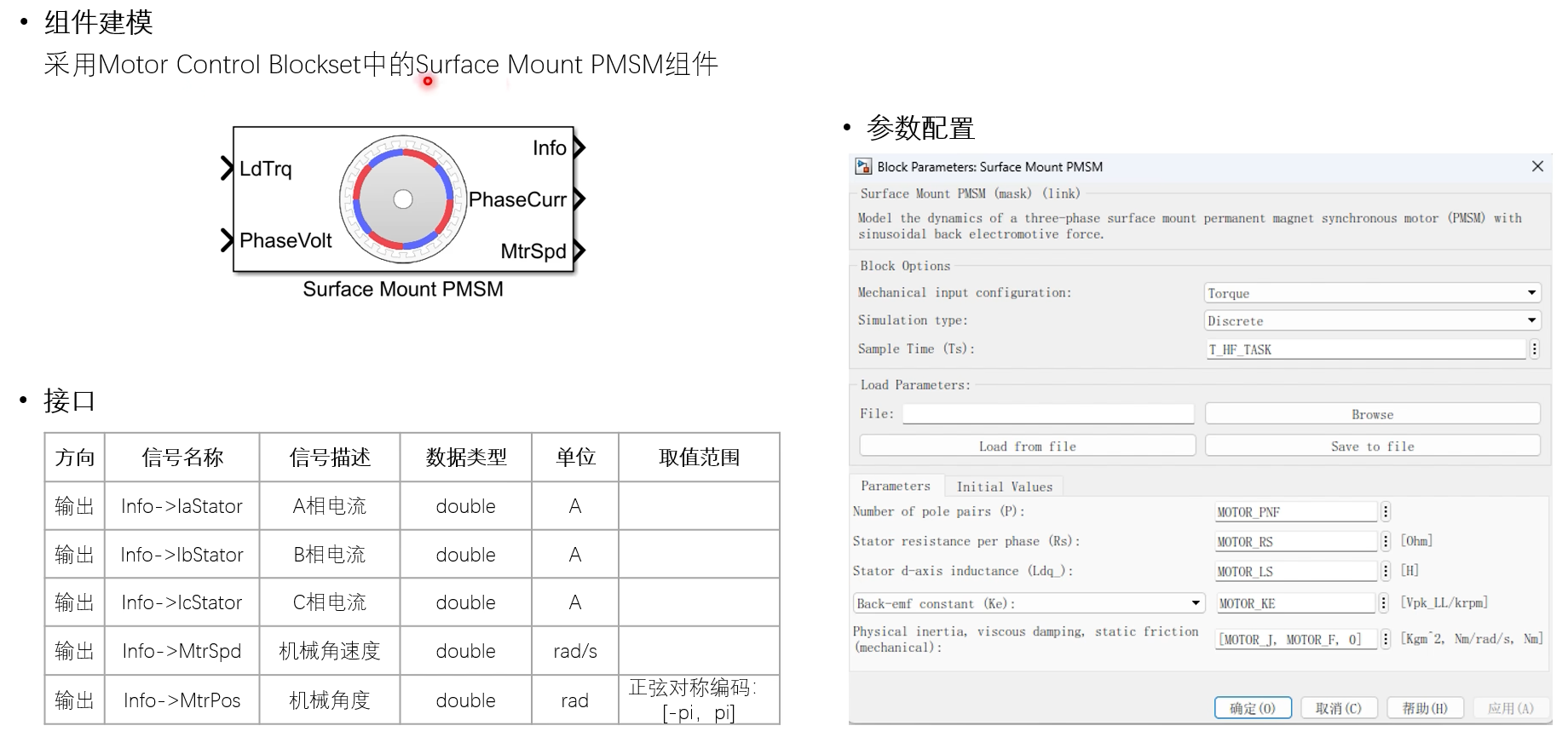
2.10电机组件