Ubuntu OpenCV C++ 获取MYNT EYE S1030-IR摄像头图像
0. 环境
- ubuntu16台式机
- MYNT EYE S1030-IR,固件版本号v2.0
- opencv 3.4.1
- MYNT EYE SDK v2.0
关于MYNT EYE摄像头的版本和SDK的版本号,根据《固件与 SDK 适配性》这个表格
https://mynt-eye-s-sdk.readthedocs.io/zh-cn/latest/src/firmware/applicable.html
对应的固件选择相同版本的SDK
1. opencv 3.4.1
1.1 准备源码
浏览器打开https://opencv.org/releases/,链接到github
下载了
opencv-3.4.1.tar.gz
放在
~/workspace/s1030ir_out_of_box/ext
1.2 安装依赖
# compiler ✓
sudo apt-get install -y build-essential
# required ✓
sudo apt-get install -y cmake git libgtk2.0-dev pkg-config libavcodec-dev libavformat-dev libswscale-dev1.3 自定义临时环境变量
cd ~/workspace/s1030ir_out_of_box
export WORK_DIR=$PWD
export ARCH="x64"export C_COMPILER="gcc"
export CXX_COMPILER="g++"
export AR="ar"echo $WORK_DIR
echo $ARCH
echo $C_COMPILER
echo $CXX_COMPILER
echo $AR1.4 命令行编译安装
复制粘贴到终端中,会自动执行。
cd $WORK_DIR
cd ext/
mkdir -p install && mkdir -p install/$ARCH && mkdir -p install/$ARCH/lib && mkdir -p install/$ARCH/include
rm -rf opencv-3.4.1
tar -zvxf opencv-3.4.1.tar.gz && cd opencv-3.4.1
rm -rf build
mkdir build && cd build
cmake -DCMAKE_C_COMPILER=$C_COMPILER -DCMAKE_CXX_COMPILER=$CXX_COMPILER \
-DCMAKE_BUILD_TYPE=RELEASE \
-DCMAKE_INSTALL_PREFIX=$WORK_DIR/ext/install/$ARCH \
-DBUILD_DOCS=OFF \
-DBUILD_EXAMPLES=OFF \
-DBUILD_TESTS=OFF \
-DBUILD_PERF_TESTS=OFF \
-DSOFTFP=OFF \
-DBUILD_SHARED_LIBS=OFF -DCMAKE_C_FLAGS="-L$WORK_DIR/ext/install/$ARCH/lib" ..
make -j8
make install
2. MYNT-EYE-S-SDK-Docs
Docs也可以得到本地版本的。曾经mynt eye的官网、docs、天猫店等等的都下线了。现在好像docs还在线,天猫也还有货源。
2.0 环境
- ubuntu18(ubuntu16的python3.5编译失败)
2.1 源码
git clone https://github.com/slightech/MYNT-EYE-S-SDK-Docs-zh_CN 切换目录
cd MYNT-EYE-S-SDK-Docs-zh_CN
cd docs
2.2 python 虚拟环境
安装
sudo apt install python3-venv
建立环境
python3 -m venv .venv激活
source .venv/bin/activate列出包
pip list
2.3 安装依赖
用默认pip源
pip install -r requirements.txt或者指定用aliyun的源
pip install -r requirements.txt -i http://mirrors.aliyun.com/pypi/simple/ --trusted-host mirrors.aliyun.com编译出html
make html退出虚拟环境
deactivate2.4 运行html测试
3. MYNT EYE SDK
sdk的版本号和摄像头的固件版本号对应,api的适配会较好。可以通过sample内的get_device_info获取设备固件号。
3.1 获取源码
https://github.com/slightech/MYNT-EYE-S-SDK/releases
下载得到
MYNT-EYE-S-SDK-2.0.1-rc2.tar.gz
解压到
cd ~/workspace/s1030ir_out_of_box/ext/MYNT-EYE-S-SDK-2.0.1-rc2
3.2 临时变量
cd ~/workspace/s1030ir_out_of_box
export WORK_DIR=$PWD
export ARCH="x64"export C_COMPILER="gcc"
export CXX_COMPILER="g++"
export AR="ar"echo $WORK_DIR
echo $ARCH
echo $C_COMPILER
echo $CXX_COMPILER
echo $AR3.3 编译sdk
cd $WORK_DIR
cd ext/MYNT-EYE-S-SDK-2.0.1-rc2rm -rf buildmkdir build && cd build cmake -DCMAKE_C_COMPILER=$C_COMPILER -DCMAKE_CXX_COMPILER=$CXX_COMPILER \-DCMAKE_INSTALL_PREFIX=$WORK_DIR/ext/install/$ARCH \-DOpenCV_DIR=$WORK_DIR/ext/install/$ARCH/share/OpenCV \-DBUILD_SHARED_LIBS=OFF -DCMAKE_C_FLAGS="-L$WORK_DIR/ext/install/$ARCH/lib" ..
make -j8
make install3.4 编译samples
cd $WORK_DIR
cd ext/MYNT-EYE-S-SDK-2.0.1-rc2
cd samples
rm -rf build
mkdir build && cd build
cmake -DCMAKE_C_COMPILER=$C_COMPILER -DCMAKE_CXX_COMPILER=$CXX_COMPILER \-DCMAKE_INSTALL_PREFIX=$WORK_DIR/ext/install/$ARCH \-Dmynteye_DIR=$WORK_DIR/ext/install/$ARCH/lib/cmake/mynteye \-DBUILD_SHARED_LIBS=OFF \-DCMAKE_C_FLAGS="-L$WORK_DIR/ext/install/$ARCH/lib" ..
make -j8
cp ../_output/bin/* ../../../install/$ARCH/bin/ -r3.5 运行测试
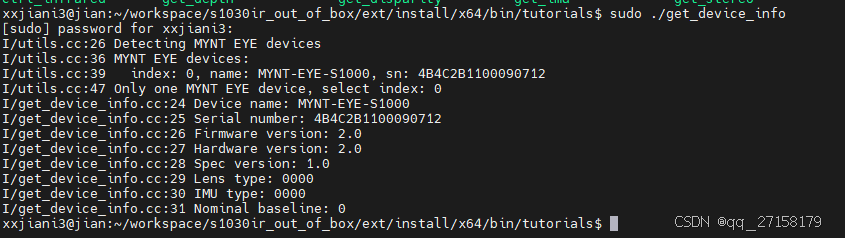
3.5.1 获取设备信息
cd ~/workspace/s1030ir_out_of_box
export WORK_DIR=$PWD
export ARCH="x64"export C_COMPILER="gcc"
export CXX_COMPILER="g++"
export AR="ar"
cd $WORK_DIR/ext/install/$ARCH/bin/tutorials
sudo ./get_device_info3.5.2 双目摄像头
sudo ./get_stereo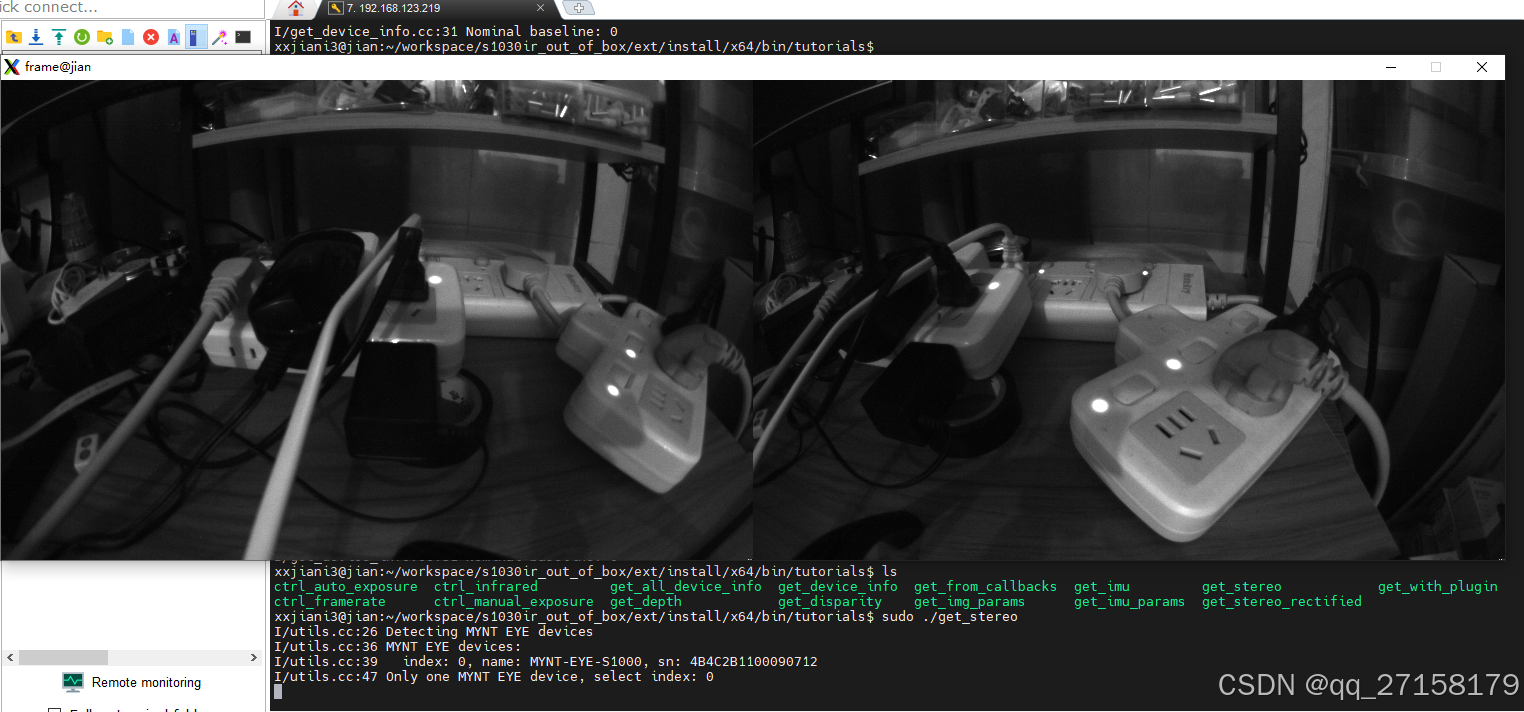
3.5.3 获取深度信息
sudo ./get_depth
3.5.4 获取IMU数据
sudo ./get_imu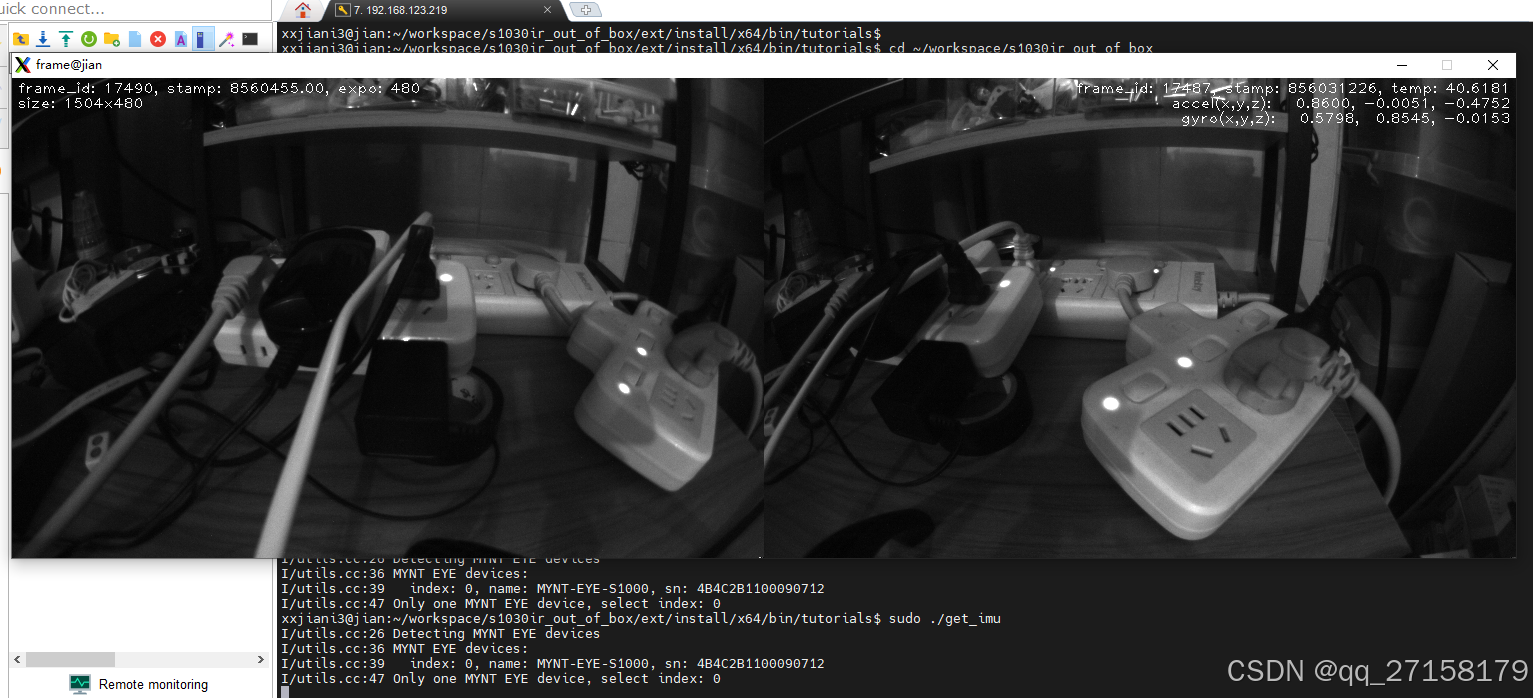
4. get_points
sdk中还有一个demo是get_points,这个是要用到PCL的。
- VTK 7.1.1
- metslib 0.5.3
- pcl 1.8.1
4.0 环境变量
cd ~/workspace/s1030ir_out_of_box
export WORK_DIR=$PWD
export ARCH="x64"export C_COMPILER="gcc"
export CXX_COMPILER="g++"
export AR="ar"echo $WORK_DIR
echo $ARCH
echo $C_COMPILER
echo $CXX_COMPILER
echo $AR4.1 安装依赖
sudo apt-get update
sudo apt-get install -y git build-essential linux-libc-dev
sudo apt-get install -y cmake cmake-gui
sudo apt-get install -y libusb-1.0-0-dev libusb-dev libudev-dev
sudo apt-get install -y mpi-default-dev openmpi-bin openmpi-common
sudo apt-get install -y libflann1.8 libflann-dev
sudo apt-get install -y libeigen3-dev
sudo apt-get install -y libboost-all-dev
# sudo apt-get install -y libvtk5.10-qt4 libvtk5.10 libvtk5-dev
sudo apt-get install -y libqhull* libgtest-dev
sudo apt-get install -y freeglut3-dev pkg-config
sudo apt-get install -y libxmu-dev libxi-dev
sudo apt-get install -y mono-complete
sudo apt-get install -y qt-sdk openjdk-8-jdk openjdk-8-jresudo apt-get install -y libopenni-dev
sudo apt-get install -y libopenni2-devsudo apt-get install libx11-dev libxext-dev libxtst-dev libxrender-dev libxmu-dev libxmuu-dev
sudo apt-get install build-essential libgl1-mesa-dev libglu1-mesa-dev
sudo apt-get install cmake cmake-guisudo apt-get install libx11-dev libxext-dev libxtst-dev libxrender-dev libxmu-dev libxmuu-dev libxi-dev
sudo apt-get install freeglut3-dev pkg-config
sudo apt-get install build-essential libgl1-mesa-dev libglu1-mesa-dev libglew-dev4.2 vtk 7编译安装
tar -zvxf VTK-7.1.1.tar.gz && cd VTK-7.1.1
mkdir build && cd build
cmake -DCMAKE_C_COMPILER=$C_COMPILER -DCMAKE_CXX_COMPILER=$CXX_COMPILER \
-DCMAKE_INSTALL_PREFIX=$WORK_DIR/ext/install/$ARCH \
-DCMAKE_C_FLAGS="-L$WORK_DIR/ext/install/$ARCH/lib" ..
make -j4
make install4.3 metslib
cd $WORK_DIR
cd ext/
wget https://www.coin-or.org/download/source/metslib/metslib-0.5.3.tgz
tar xzvf metslib-0.5.3.tgz
cd metslib-0.5.3
#./configure./configure --enable-static --prefix=$WORK_DIR/ext/install/$ARCH
make -j4
make install4.4 pcl
pcl 1.8.1的编译,用i3的台式机,CPU 4核心,8G RAM可以编译。
sudo apt-get install libpcap-devcd $WORK_DIR
cd ext/
mkdir -p install && mkdir -p install/$ARCH && mkdir -p install/$ARCH/lib && mkdir -p install/$ARCH/include
rm -rf pcl-pcl-1.8.1
tar -zvxf pcl-pcl-1.8.1.tar.gz && cd pcl-pcl-1.8.1
rm -rf build
mkdir build && cd build
cmake -DCMAKE_C_COMPILER=$C_COMPILER -DCMAKE_CXX_COMPILER=$CXX_COMPILER \
-DCMAKE_INSTALL_PREFIX=$WORK_DIR/ext/install/$ARCH \
-DBUILD_GPU=ON -DBUILD_apps=ON -DBUILD_examples=ON \
-DVTK_DIR=$WORK_DIR/ext/install/x64/lib/cmake/vtk-7.1 \
-DBUILD_visualization=ON \
-DBUILD_SHARED_LIBS=OFF -DCMAKE_C_FLAGS="-L$WORK_DIR/ext/install/$ARCH/lib" ..
make -j8
make install4.5 再次编译sdk的samples
cd $WORK_DIR
cd ext/MYNT-EYE-S-SDK-2.0.1-rc2
cd samples
rm -rf build
mkdir build && cd build
cmake \
-DCMAKE_C_COMPILER=$C_COMPILER -DCMAKE_CXX_COMPILER=$CXX_COMPILER \
-DOpenCV_DIR=$WORK_DIR/ext/install/$ARCH/share/OpenCV \
-Dmynteye_DIR=$WORK_DIR/ext/install/$ARCH/lib/cmake/mynteye \
-DPCL_DIR=$WORK_DIR/ext/install/$ARCH/share/pcl-1.8 \
-DCMAKE_C_FLAGS="-L$WORK_DIR/ext/install/$ARCH/lib" \
..
make -j8
cp ../_output/bin/* ../../../install/$ARCH/bin/ -r4.6 运行测试
cd ~/workspace/s1030ir_out_of_box
export WORK_DIR=$PWD
export ARCH="x64"
cd $WORK_DIR/ext/install/$ARCH/bin/tutorials
sudo ./get_points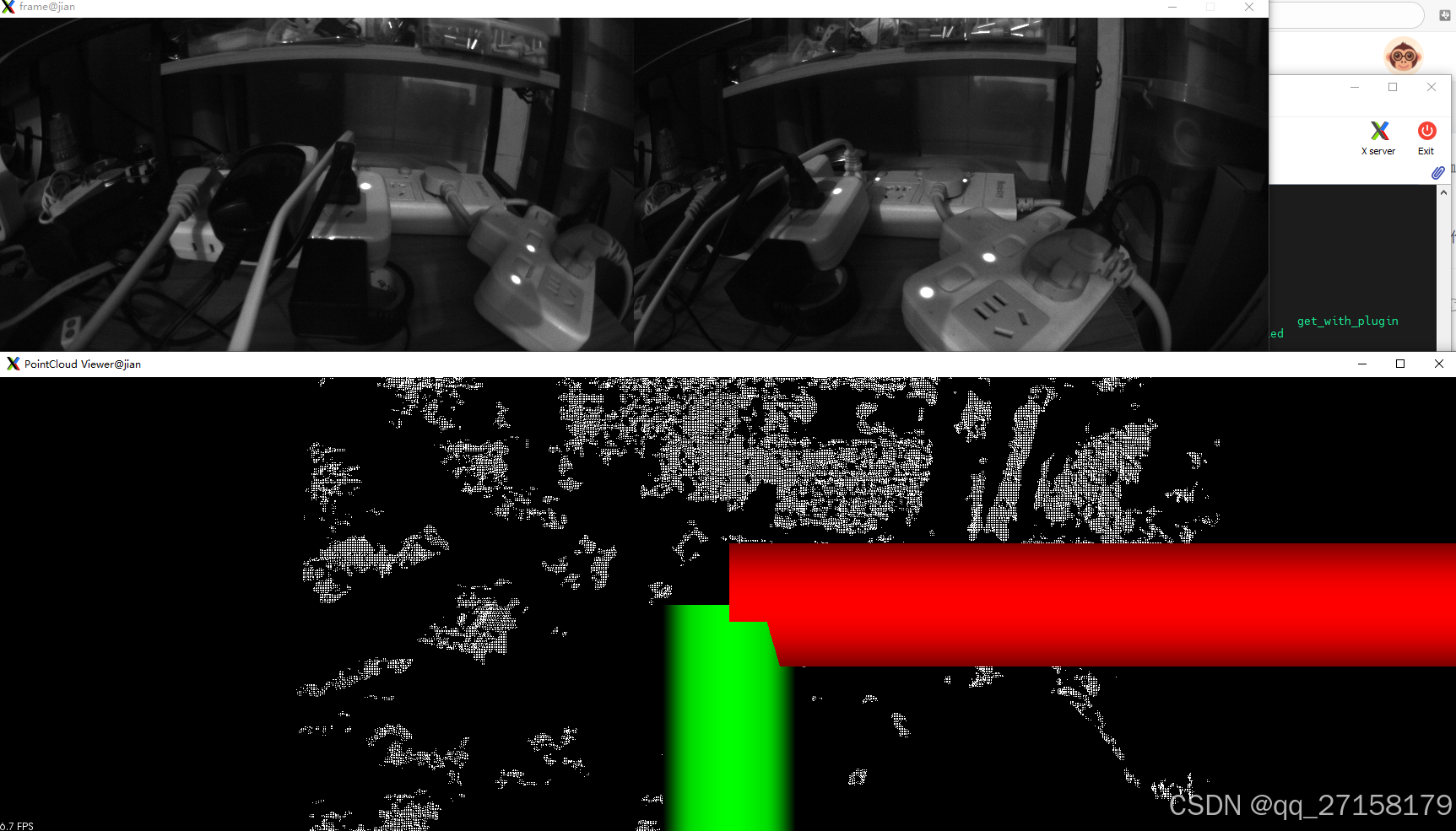
5. 实现设备驱动
程序目录结构
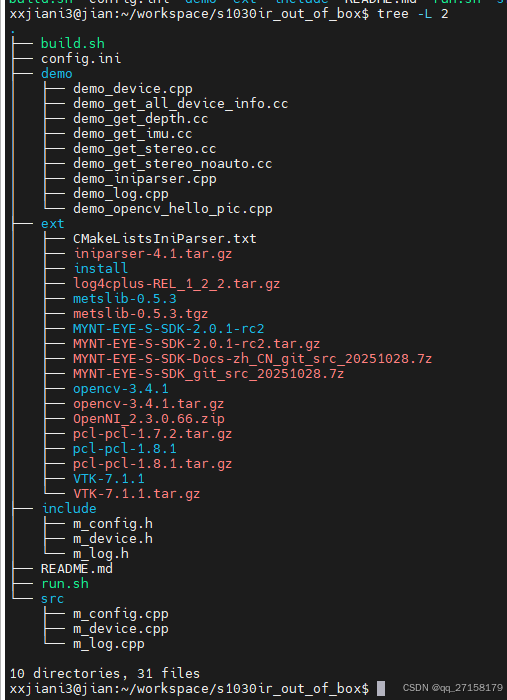
config模块是用iniparser的,log模块用了log4cplus,不用也可以。
5.1 m_device.cpp
//
// Created by qjfen on 2024/1/19.
//#include "stdio.h"
#include <cstring> // memset
#include <iostream> // std::cout
#include "m_device.h"#include "mynteye/context.h"
#include "mynteye/device.h"
#include "mynteye/logger.h"
#include "mynteye/api.h"
#include <opencv2/opencv.hpp>MYNTEYE_USE_NAMESPACEstd::shared_ptr<API> handle;
bool g_enableDepth;
bool g_enableImu;m_device::m_device()
{//ctor
}m_device::~m_device()
{//dtor
}
m_device& m_device::getInstance()
{static m_device instance;return instance;
}
int m_device::init(int handle_index)
{int ret;LOG(INFO) << "Detecting MYNT EYE devices";Context context;auto &&devices = context.devices();size_t n = devices.size();if (n <= 0) {LOG(ERROR) << "No MYNT EYE devices :(";return -1;}for (size_t i = 0; i < n; i++) {auto &&device = devices[i];LOG(INFO) << "MYNT EYE device index: " << i;LOG(INFO) << " Device name: " << device->GetInfo(Info::DEVICE_NAME);LOG(INFO) << " Serial number: " << device->GetInfo(Info::SERIAL_NUMBER);LOG(INFO) << " Firmware version: "<< device->GetInfo(Info::FIRMWARE_VERSION);LOG(INFO) << " Hardware version: "<< device->GetInfo(Info::HARDWARE_VERSION);LOG(INFO) << " Spec version: " << device->GetInfo(Info::SPEC_VERSION);LOG(INFO) << " Lens type: " << device->GetInfo(Info::LENS_TYPE);LOG(INFO) << " IMU type: " << device->GetInfo(Info::IMU_TYPE);LOG(INFO) << " Nominal baseline: "<< device->GetInfo(Info::NOMINAL_BASELINE);}handle = API::Create();if (!handle)return -1;return 0;
}
int m_device::close()
{int ret;if (!g_enableImu) {handle->Stop(Source::VIDEO_STREAMING);} else {handle->Stop(Source::ALL);}return 0;
}
int m_device::config(bool enable_depth, bool enable_imu)
{g_enableDepth = enable_depth;g_enableImu = enable_imu;if(g_enableDepth) {handle->EnableStreamData(Stream::DEPTH);}if(g_enableImu) {handle->EnableMotionDatas();}return 0;
}
int m_device::open()
{if (!g_enableImu) {handle->Start(Source::VIDEO_STREAMING);} else {handle->Start(Source::ALL);}
}
int m_device::recvFrame(cv::Mat* mat_left, cv::Mat* mat_right, cv::Mat* mat_depth, std::vector<mynteye::api::MotionData>* imu_datas)
{handle->WaitForStreams();api::StreamData left_data = handle->GetStreamData(Stream::LEFT);api::StreamData right_data = handle->GetStreamData(Stream::RIGHT);*mat_left = left_data.frame.clone();*mat_right = right_data.frame.clone();if (left_data.frame.empty()) {LOG(INFO) << "left_data is empty";return -1;}if (right_data.frame.empty()) {LOG(INFO) << "right_data is empty";return -1;}if(g_enableDepth) {api::StreamData depth_data = handle->GetStreamData(Stream::DEPTH);*mat_depth = depth_data.frame.clone();if (depth_data.frame.empty()) {LOG(INFO) << "depth_data is empty";return -1;}}if(g_enableImu) {std::vector<api::MotionData> motion_datas = handle->GetMotionDatas();*imu_datas = motion_datas;}return 0;
}5.2 m_device.h
#ifndef __M_DEVICE_H
#define __M_DEVICE_H#define device_inst m_device::getInstance()#include "stdint.h" // uint32_t
#include <opencv2/opencv.hpp>
#include "mynteye/api.h"class m_device
{public:m_device();virtual ~m_device();static m_device& getInstance();int init(int handle_index);int open();int close();int recvFrame(cv::Mat* mat_left, cv::Mat* mat_right, cv::Mat* mat_depth, std::vector<mynteye::api::MotionData>* imu_datas);int config(bool enable_depth, bool enable_imu);protected:private:
};#endif //__M_DEVICE_H
5.3 demo_device.cpp
#include <stdio.h>
#include <unistd.h> // usleep#include "m_device.h"#include <opencv2/opencv.hpp>
#include "mynteye/api.h"
#include "mynteye/logger.h"int main(void)
{int ret;printf("[main]device_inst.init...\r\n");ret = device_inst.init(0);printf("[main]device_inst.config...\r\n");bool enable_depth = true;bool enable_imu = true;ret = device_inst.config(enable_depth, enable_imu);printf("[main]device_inst.open...\r\n");ret = device_inst.open();printf("[main]device_inst.recvMat...\r\n");cv::Mat mat_left, mat_right, mat_depth;std::vector<mynteye::api::MotionData> motion_datas;while(1) {ret = device_inst.recvFrame(&mat_left, &mat_right, &mat_depth, &motion_datas);if (ret>=0) {break;}cv::waitKey(1);}printf("[main]device_inst.close...\r\n");device_inst.close();cv::imwrite("mat_left.png", mat_left);cv::imwrite("mat_right.png", mat_right);if(enable_depth) {cv::imwrite("mat_depth.png", mat_depth);}cv::imshow("mat_left", mat_left);cv::imshow("mat_right", mat_right);if(enable_depth) {cv::imshow("mat_depth", mat_depth);}cv::waitKey(0);cv::destroyAllWindows();if(enable_imu){for (auto &&data : motion_datas) {LOG(INFO) << "Imu frame_id: " << data.imu->frame_id<< ", timestamp: " << data.imu->timestamp<< ", accel_x: " << data.imu->accel[0]<< ", accel_y: " << data.imu->accel[1]<< ", accel_z: " << data.imu->accel[2]<< ", gyro_x: " << data.imu->gyro[0]<< ", gyro_y: " << data.imu->gyro[1]<< ", gyro_z: " << data.imu->gyro[2]<< ", temperature: " << data.imu->temperature;}}return 0;
}
5.4 编译
# 环境
cd ~/workspace/s1030ir_out_of_box
export WORK_DIR=$PWD
export ARCH="x64"# 用户源码编译出库
$CXX_COMPILER -c src/m_device.cpp -Iinclude -Iext/install/$ARCH/include -Lext/install/$ARCH/lib-std=c++11 -lmynteye -lopencv_calib3d -lopencv_imgproc -lopencv_imgcodecs -lopencv_core -lopencv_photo -lopencv_highgui -std=c++11
$AR -r libs1030ir.a *.o
rm *.o# 编译可执行程序
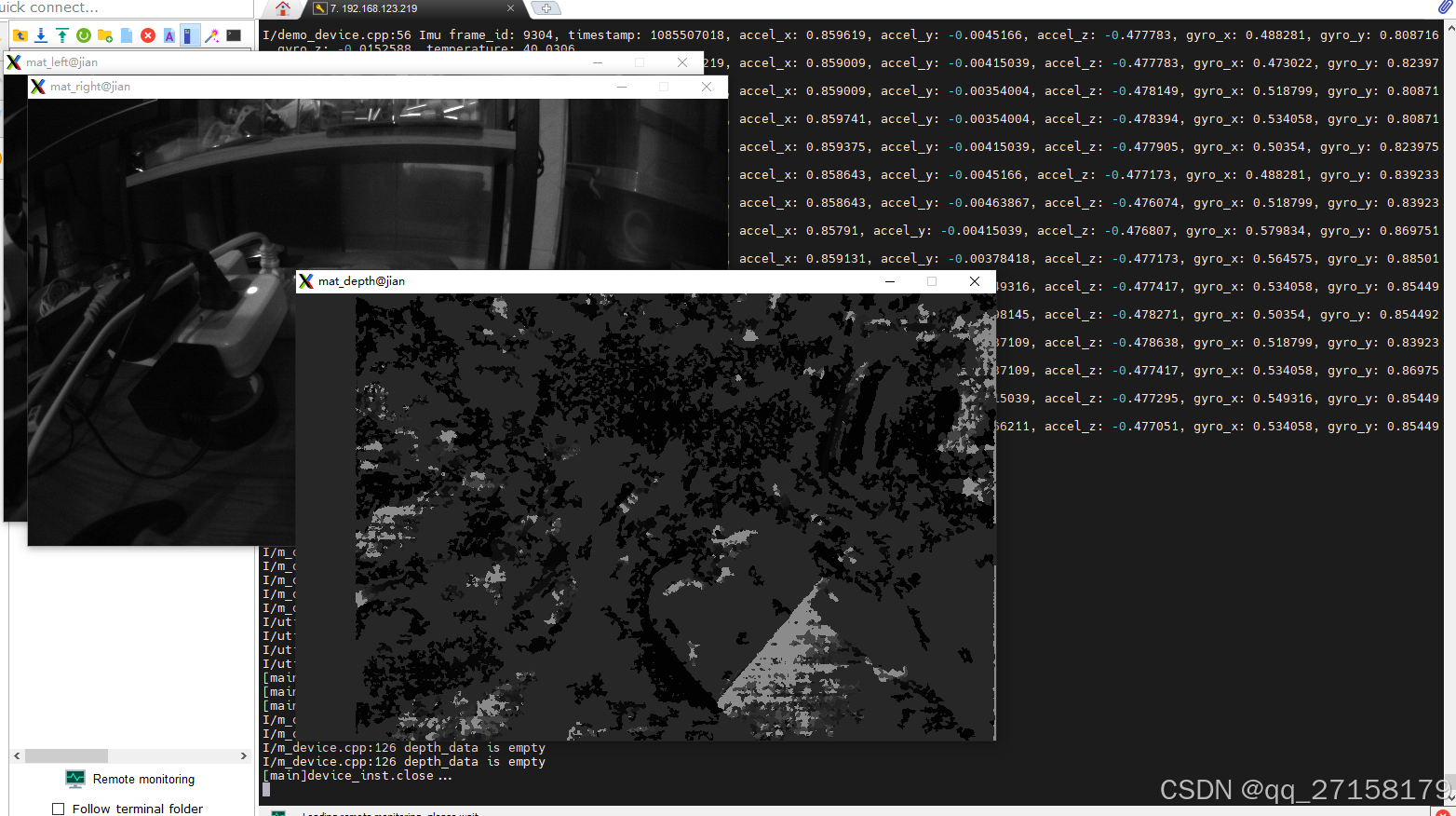
$CXX_COMPILER -o demo_device demo/demo_device.cpp -Iext/install/$ARCH/include -Iinclude -L. -Lext/install/$ARCH/lib -ls1030ir -lmynteye -lopencv_calib3d -lopencv_imgproc -lopencv_imgcodecs -lopencv_core -lopencv_photo -lopencv_highgui -std=c++115.5 效果
获取到了左右摄像头的图像、深度图像、和IMU数据。