【Matlab】基于模型预测控制(MPC)与滚动时域估计(MHE)集成的目标点镇定研究
目录
01 基本信息
02 主要内容
2.1 MPC 与 MHE 集成的闭环控制
2.2 MPC 问题建模与转化
2.3 噪声模型与鲁棒性验证
03 运行结果
下载链接
01 基本信息
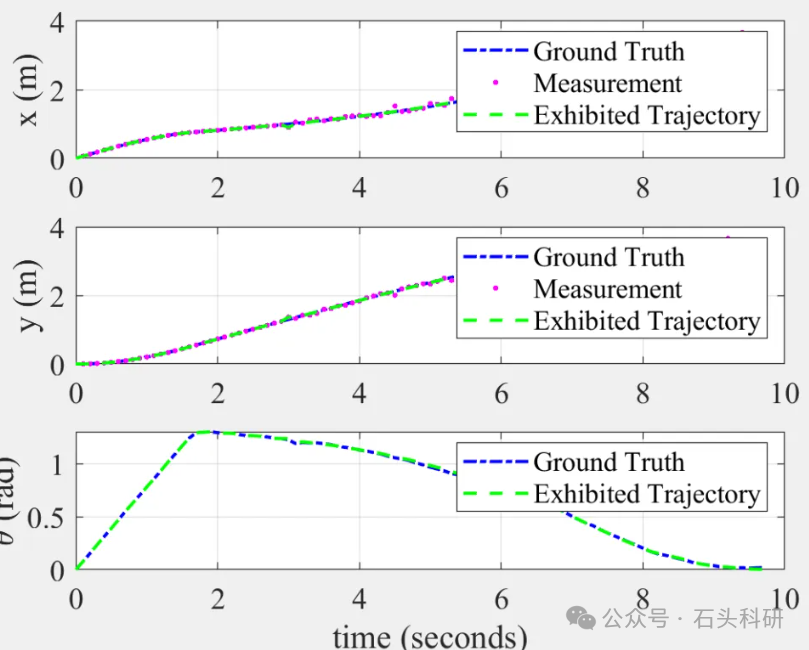
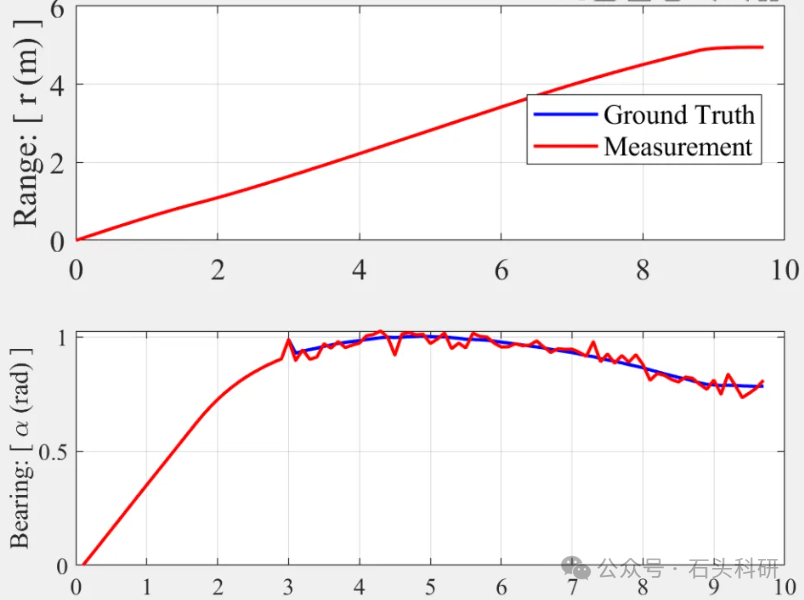
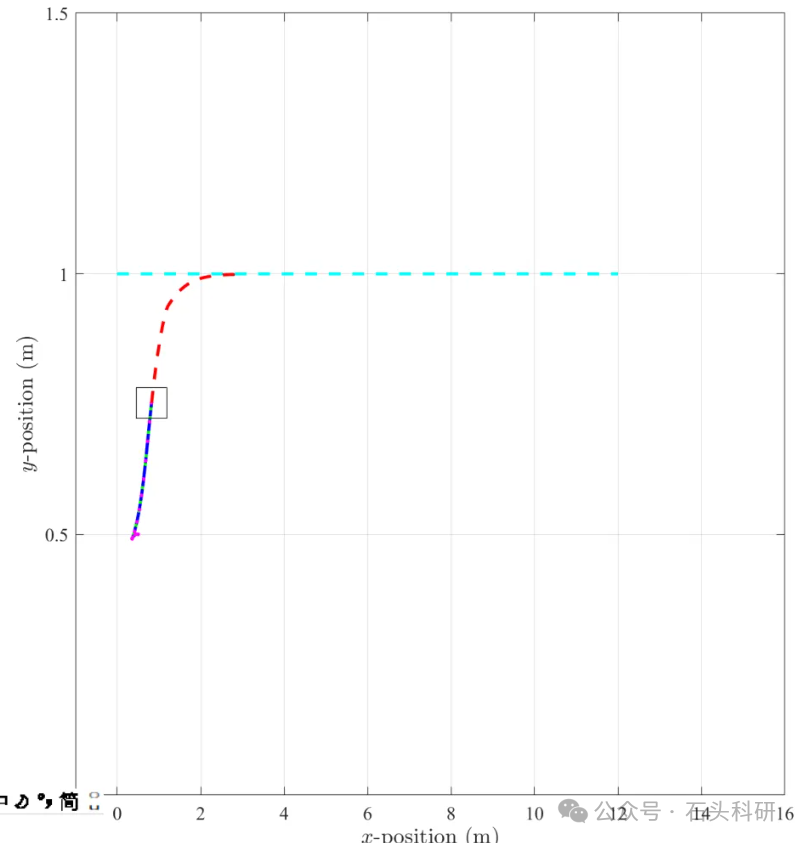
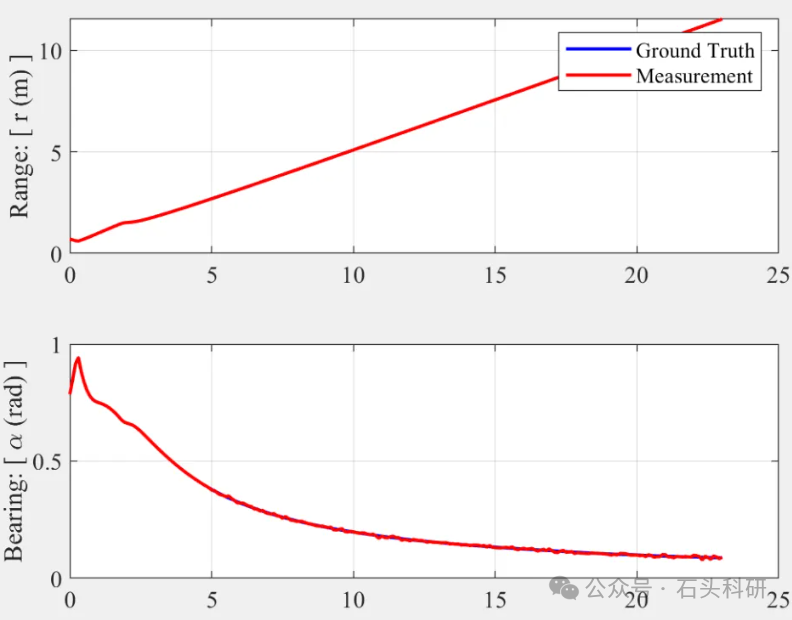
摘要:该程序基于Matlab平台实现了 “模型预测控制MPC+滚动时域估计MHE” 集成的移动机器人目标点镇定算法。代码核心功能为在传感器和执行器双重高斯噪声干扰下,通过联合优化估计与控制过程,驱动机器人从随机初始状态收敛至指定目标位姿。程序先通过测距-测角传感器获取带噪观测数据,再利用 MHE 滚动优化估计机器人实时状态,将估计值输入MPC优化未来控制序列,控制指令经执行器叠加噪声后驱动机器人运动,形成闭环循环。代码采用 CASADI 工具求解转化后的非线性规划问题,通过仿真循环验证了算法在双重噪声环境下的稳定性和鲁棒性。
程序运行环境:matlab,注释清晰,效果好!
02 主要内容
2.1 MPC 与 MHE 集成的闭环控制
突破传统分步处理估计与控制的局限,将传感器噪声和执行器噪声同时纳入联合优化,构建 “估计–控制闭环”,提升双重噪声环境下的控制精度。突破传统分步处理估计与控制的局限,将传感器噪声和执行器噪声同时纳入联合优化,构建 “估计–控制闭环”,提升双重噪声环境下的控制精度。
2.2 MPC 问题建模与转化
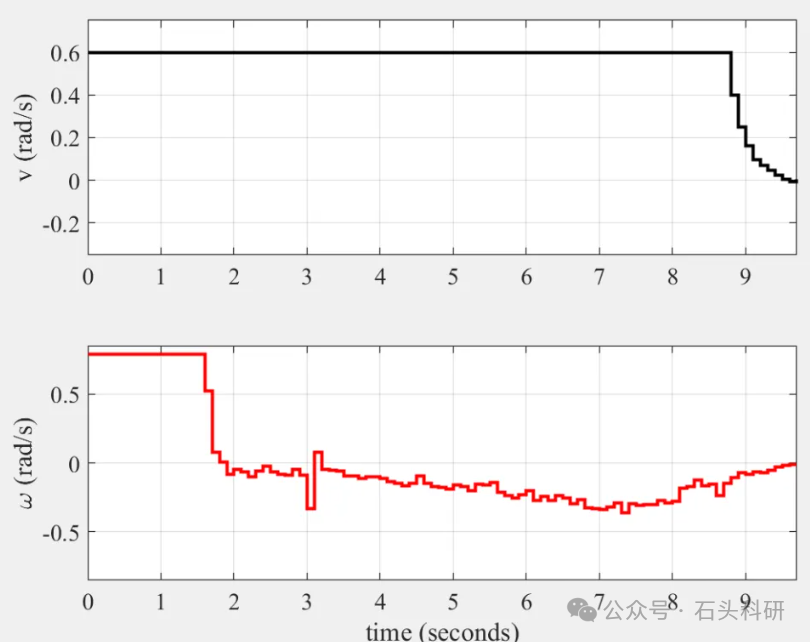
目标函数:兼顾状态跟踪精度与控制稳定性,最小化预测时域内状态与目标位姿的二次误差,以及控制量与零输入的二次误差,公式如下:

转化方法:采用多重打靶法将非线性 MPC 问题转化为非线性规划(NLP)问题,利用 CASADI 工具调用 IPOPT 求解器高效求解。
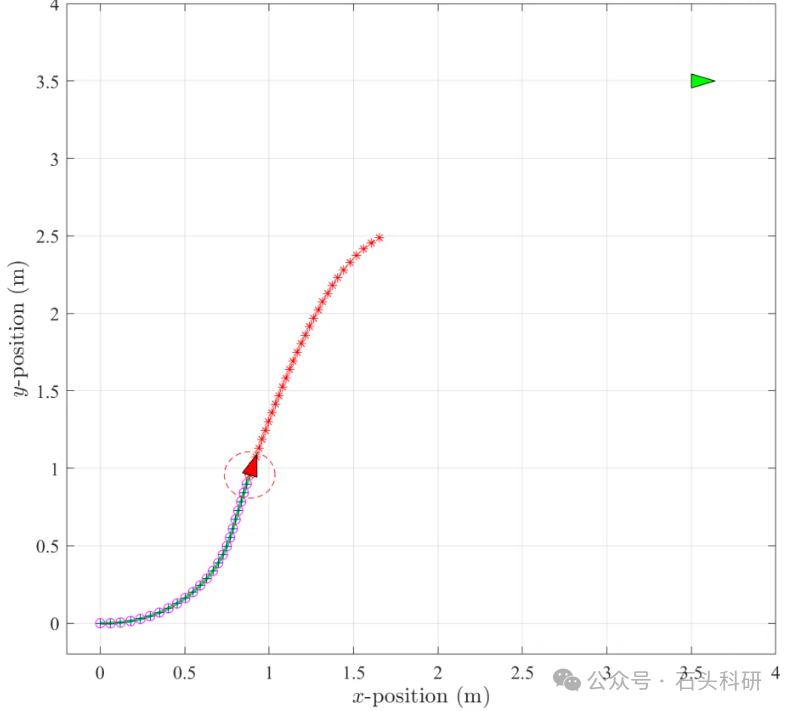
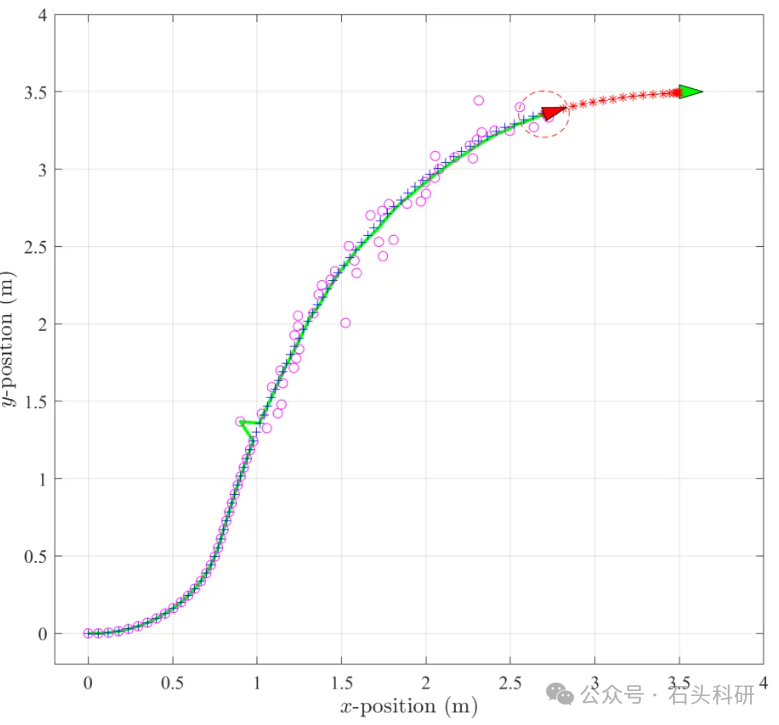
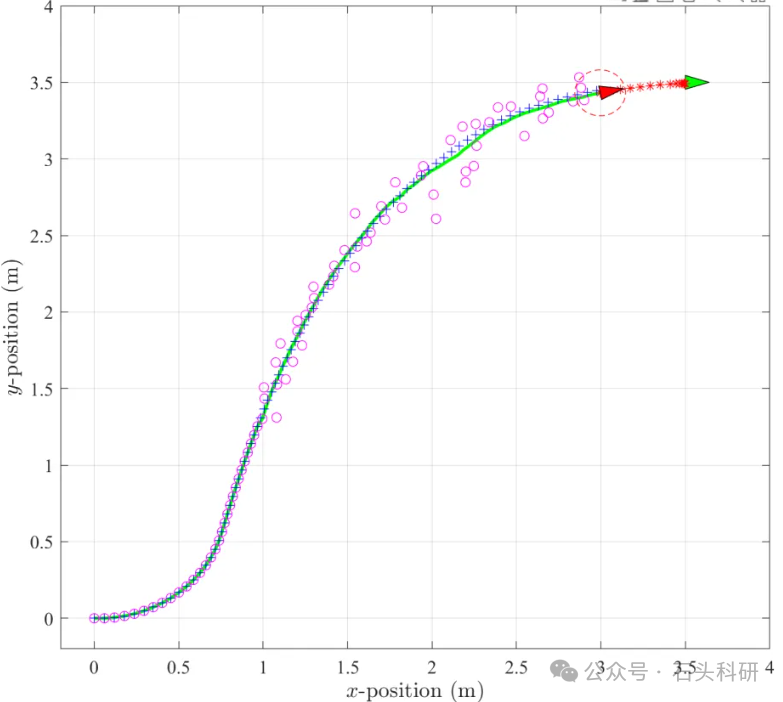
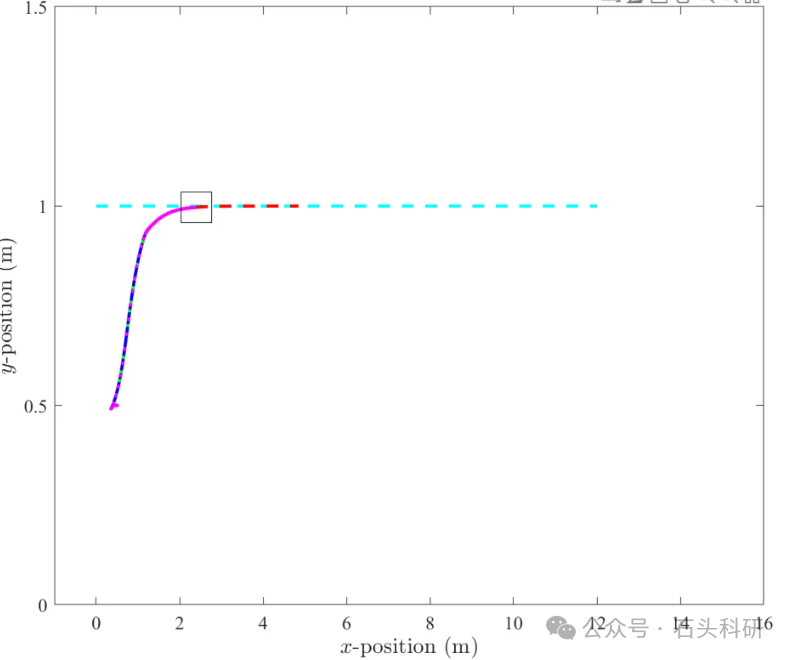
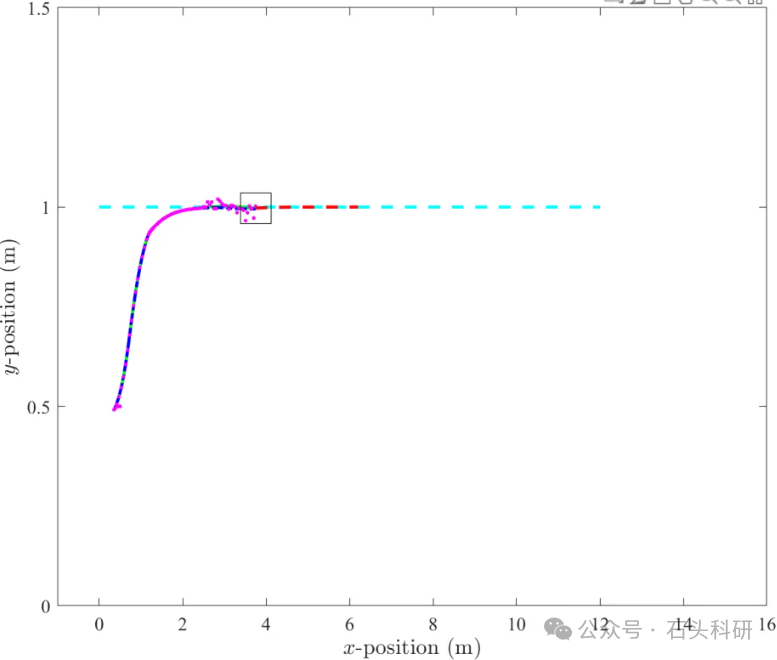
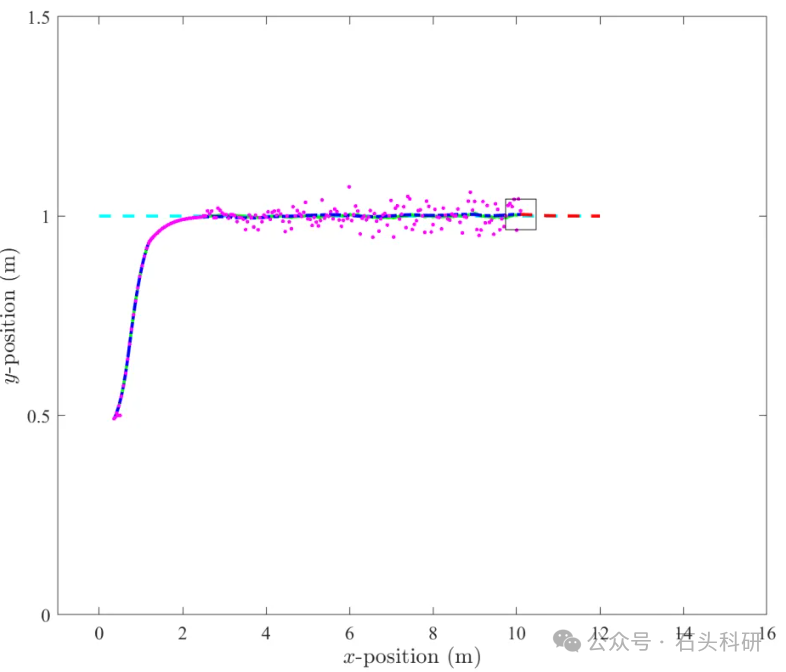
2.3 噪声模型与鲁棒性验证

传统分步方法在双重噪声下易出现目标点振荡,而所提集成方法可使机器人稳定收敛至目标位姿,验证了算法的鲁棒性。
03 运行结果

下载链接