DoIP协议常用数据类型及其使用场景详解
DoIP协议中常用的数据类型及其具体使用场景,基于ISO 13400标准规范。
一、核心数据类型分类
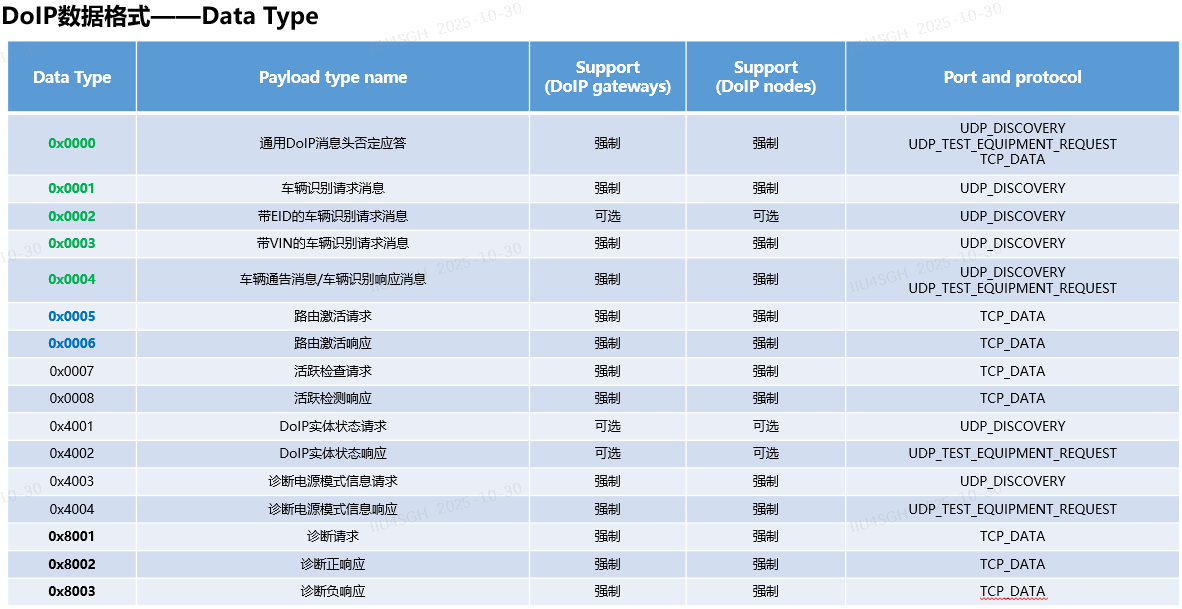
1. 诊断消息类 (0x8000-0x8003)
| 数据类型 | 十六进制值 | 含义 | 使用场景 | 传输方式 |
|---|---|---|---|---|
| 诊断消息 | 0x8001 | 诊断请求 | 发送UDS诊断请求,如读取ECU状态、执行诊断测试、读取故障码等 | TCP (主要) |
| 诊断正响应 | 0x8002 | 诊断成功响应 | 对诊断请求的成功响应,返回请求的数据 | TCP (主要) |
| 诊断负响应 | 0x8003 | 诊断错误响应 | 对诊断请求的失败响应,返回错误代码和原因 | TCP (主要) |
使用场景详解:
- 0x8001:用于发送UDS诊断请求,例如
0x22 0x02 0x02(读取发动机转速)。 - 0x8002:当诊断请求成功执行后,ECU返回的确认响应,如返回发动机转速数据。
- 0x8003:当诊断请求执行失败时,ECU返回的错误响应,例如请求的参数不存在(返回0x7F 0x22 0x11)。
2. 车辆发现与标识类 (0x0001-0x0004)
| 数据类型 | 十六进制值 | 含义 | 使用场景 | 传输方式 |
|---|---|---|---|---|
| 车辆识别请求 | 0x0001 | 请求获取车辆信息 | 诊断设备向网络上的车辆发送,请求获取车辆标识信息 | UDP |
| 车辆识别响应 | 0x0002 | 提供车辆信息 | 车辆对识别请求的响应,包含VIN、逻辑地址等 | UDP |
| 车辆声明请求 | 0x0003 | 请求车辆主动声明 | 诊断设备请求车辆主动声明自身 | UDP |
| 车辆声明响应 | 0x0004 | 车辆主动声明 | 车辆主动发送的声明信息,包含VIN、GID等 | UDP |
使用场景详解:
- 0x0001/0x0002:用于诊断连接建立前的车辆发现过程。诊断设备发送0x0001请求,车辆返回0x0002响应包含VIN、逻辑地址、EID、GID等信息。
- 0x0003/0x0004:车辆在获取有效IP地址后,会定期发送3次车辆声明报文(0x0003),使用UDP广播发送至本地限制广播地址(255.255.255.255),用于网络发现。
3. 诊断会话控制类 (0x0005-0x0006)
| 数据类型 | 十六进制值 | 含义 | 使用场景 | 传输方式 |
|---|---|---|---|---|
| 路由激活请求 | 0x0005 | 请求激活诊断路由 | 诊断设备请求激活特定ECU的诊断路由 | TCP |
| 路由激活响应 | 0x0006 | 路由激活确认 | ECU对路由激活请求的确认响应 | TCP |
使用场景详解:
- 0x0005:在TCP socket建立后,诊断设备发送路由激活请求,指定要与之通信的ECU。
- 0x0006:ECU对路由激活请求的响应,确认诊断会话已建立,可以开始诊断通信。
4. 连接管理类 (0x0007-0x0008)
| 数据类型 | 十六进制值 | 含义 | 使用场景 | 传输方式 |
|---|---|---|---|---|
| 心跳检查请求 | 0x0007 | 检查连接活跃性 | 诊断设备定期发送心跳请求,确认连接是否有效 | TCP |
| 心跳检查响应 | 0x0008 | 心跳确认 | ECU对心跳请求的响应,确认连接仍然有效 | TCP |
使用场景详解:
- 0x0007:诊断设备定期发送心跳检查请求,用于检查当前建立的诊断连接socket是否仍然在使用中。
- 0x0008:ECU对心跳请求的响应,如果诊断设备连续多次未收到心跳响应,将关闭socket释放资源。
二、错误响应类型
| 错误码 | 含义 | 详细说明 | 使用场景 |
|---|---|---|---|
| 0x00 | 格式错误 | 数据包格式不符合DoIP协议规范 | 诊断设备发送格式错误的请求 |
| 0x01 | 未知的负载类型 | 请求的负载类型未定义 | 诊断设备发送了未定义的负载类型请求 |
| 0x02 | 报文过长 | 负载长度超过ECU支持的最大值 | 发送的负载长度超过了ECU配置的最大值 |
| 0x03 | 超出内存 | 内存不足,无法处理请求 | ECU内存资源不足,无法处理请求 |
| 0x04 | 无效的负载长度 | 负载长度与实际数据不匹配 | 负载长度字段与实际数据长度不一致 |
错误响应使用场景:
- 例如,当负载长度在DoIP报头中占4个字节,理论上支持传输4GB数据,但如果ECU配置最大支持0x0010000字节(65536字节),超过此值将返回NACK 0x02。
三、DoIP协议在实际应用中的典型流程
车辆发现阶段:
- 车辆启动后,获取IP地址
- 车辆发送3次车辆声明报文(0x0003)
- 诊断设备发送车辆识别请求(0x0001)
- 车辆返回车辆识别响应(0x0002)
诊断连接建立:
- 诊断设备建立TCP连接
- 诊断设备发送路由激活请求(0x0005)
- ECU返回路由激活响应(0x0006)
诊断通信阶段:
- 诊断设备发送诊断消息(0x8001)
- ECU返回诊断正响应(0x8002)或负响应(0x8003)
连接维护阶段:
- 诊断设备定期发送心跳检查请求(0x0007)
- ECU返回心跳检查响应(0x0008)
- 如长时间未收到响应,诊断设备关闭连接
四、DoIP协议优势对比
| 特性 | DoIP | 传统CAN诊断 |
|---|---|---|
| 传输速率 | 最高1Gbps | 125K-1Mbps |
| 数据包大小 | 理论最大4GB | 8字节/帧 |
| 适用场景 | 高速诊断、软件刷写、远程诊断 | 基础故障诊断、低速数据传输 |
| 远程访问 | 支持 | 不支持 |
| 网络架构 | 基于以太网 | 基于CAN总线 |
根据[7]中的实测数据,DoIP协议的刷写速度比CAN快约47倍(例如,4GB文件DoIP刷写仅需4秒,而CAN需要3分18秒)。
五、总结
- 核心诊断:
0x8001(请求)→0x8002/0x8003(响应)。 - 网络发现:
0x0001/0x0002(识别)、0x0003/0x0004(声明)。 - 会话控制:
0x0005(激活)→0x0006(确认)。 - 连接维护:
0x0007(心跳请求)→0x0008(心跳响应)。
关键优势:DoIP通过以太网实现高速、远程诊断,是现代车载网络(如ADAS、OTA更新)的必备协议。
DoIP协议通过不同的数据类型实现了完整的诊断通信流程,从车辆发现、连接建立到诊断通信和连接维护。其中,0x8001/0x8002/0x8003是核心诊断数据类型,用于实际的诊断请求和响应;0x0001-0x0004用于车辆发现和标识;0x0005-0x0006用于诊断会话控制;0x0007-0x0008用于连接管理。
在现代车载网络中,DoIP已成为替代传统CAN诊断的必然趋势,特别是在需要高速数据传输、远程诊断和软件刷写等场景中,其优势尤为明显。