海康相机与机器人标定
- 确定相机图像来源
要做相机与机器人或者行走轴模组的标定,首先需要确定相机的图像来源,优先配置好相机图像源的参数。


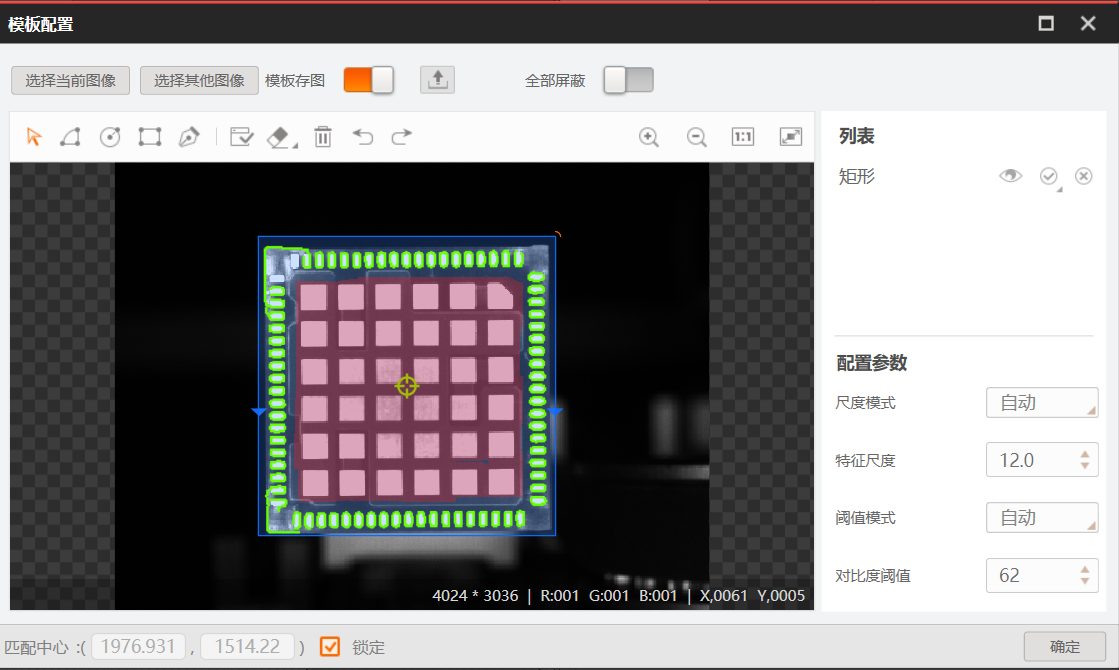
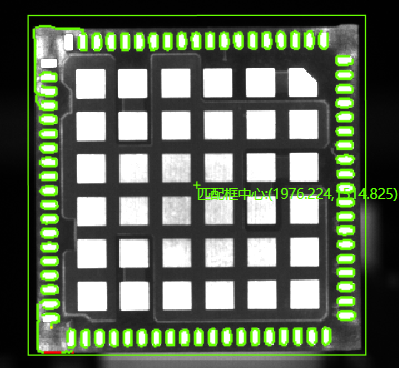
- 创建物体对应的特征模板
创建标定所需物体的体征模板,并确认图像的匹配中心。
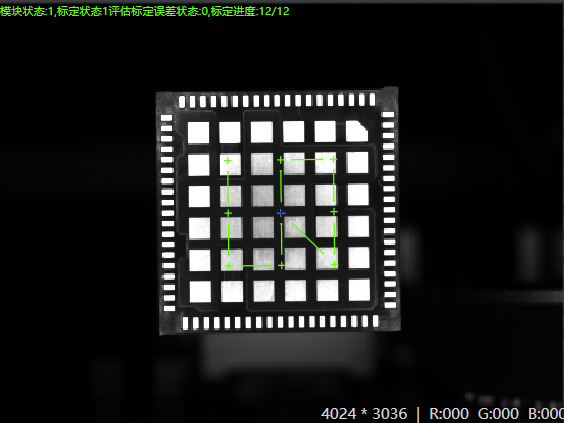
- 进行N点标定
确定输入源的图像中心与图像坐标

确定机械臂运动过程中是X优先还是Y优先,如果是X优先Y轴坐标需要保持不动Y优先X坐标需保持不动,设置运动偏移(根据识别物体的大小,不要超出特征匹配的范围)

触发N点标定模块,没触发一次,图像显示的标定次数就会加1。
检查标定文件有无错误的标定点位。

生成需要使用的标定文件,在标定转换模块中使用生成的标定文件。
