摄像头选型与对应采集工具方案
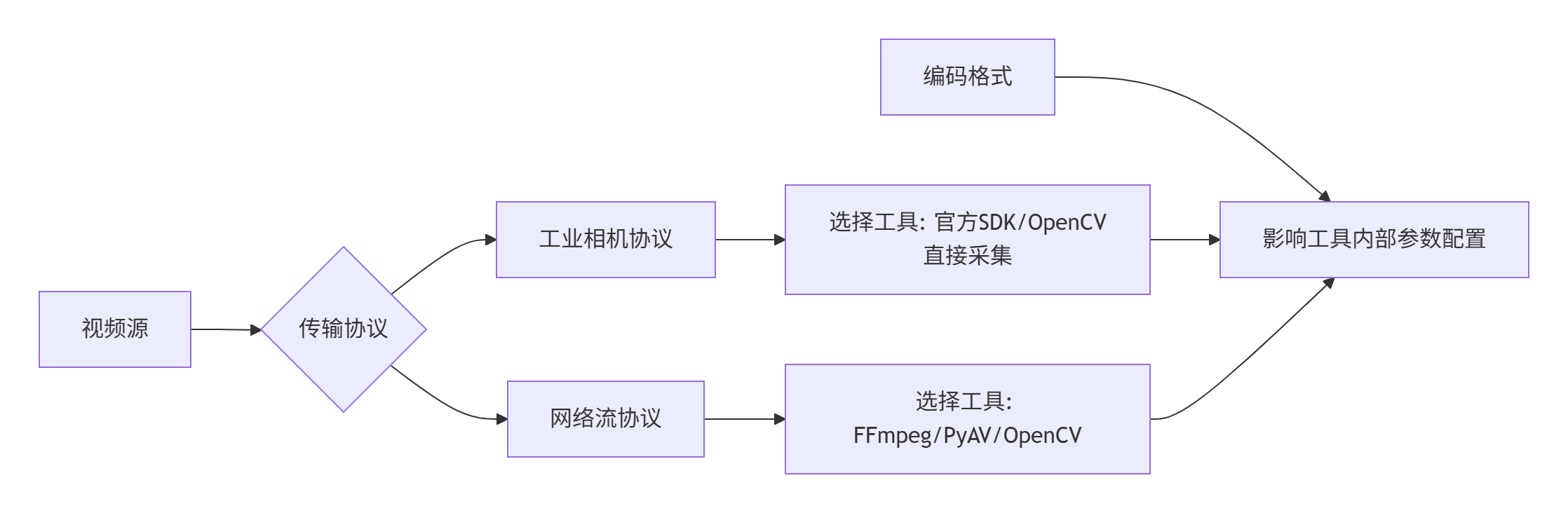
协议决定工具选择,编码影响工具配置
决策流程
def industrial_camera_selection_workflow():"""工业级相机工具选择决策流程"""# 第一步:识别协议(最关键!)if 是工业相机(protocol_type):if protocol == "GigE Vision":return "厂家SDK + OpenCV(最优性能)"elif protocol == "USB3 Vision": return "OpenCV + DirectShow/V4L2"elif 是网络相机(protocol_type):if protocol == "RTSP/RTMP":return "FFmpeg/PyAV + OpenCV"elif protocol == "ONVIF":return "ONVIF客户端 + FFmpeg"elif 是系统设备(protocol_type):return "OpenCV直接采集"else:return "FFmpeg(通用后备方案)"# 第二步:根据编码优化(性能调优)if 编码格式 in ["H.264", "H.265"]:启用硬件加速()elif 编码格式 == "MJPEG":使用轻量解码()决策优先级:
第一优先级(协议):决定用什么工具能"连得上"
第二优先级(编码):决定如何配置工具"跑得好"
第三优先级(业务需求):决定参数调优"用得稳"
1. 协议是工具选择的决定性因素
协议层级决定接入方式
# 协议决定"如何连接"
protocol_hierarchy = {"硬件接口协议": {"GigE Vision": "工业相机专用","USB3 Vision": "即插即用工业相机", "Camera Link": "高速传输"},"网络流协议": {"RTSP": "实时流媒体","RTMP": "直播流", "HLS": "HTTP流","ONVIF": "安防相机标准"},"文件/设备协议": {"V4L2": "Linux视频设备","DirectShow": "Windows设备","文件路径": "本地视频文件"}
}协议对应的工具选择矩阵
协议类型 | 具体协议 | 推荐工具 | 原因 |
|---|---|---|---|
工业协议 | GigE Vision, USB3 Vision | 官方SDK, OpenCV with GenICam | 需要硬件级控制 |
网络流协议 | RTSP, RTMP, HLS | FFmpeg, PyAV, OpenCV | 需要流媒体解码 |
系统设备协议 | V4L2, DirectShow | OpenCV直接采集 | 系统原生支持 |
def select_tool_by_protocol(protocol):"""根据协议选择工具类别"""protocol_tool_map = {# 工业相机协议 → 专用工具'GigE Vision': '厂家SDK + OpenCV','USB3 Vision': 'OpenCV DirectShow/V4L2',# 网络流协议 → 流媒体工具 'RTSP': 'FFmpeg/PyAV + OpenCV','RTMP': 'FFmpeg + OpenCV','ONVIF': 'ONVIF库 + FFmpeg',# 系统设备协议 → 系统工具'V4L2': 'OpenCV直接采集','DirectShow': 'OpenCV CAP_DSHOW'}return protocol_tool_map.get(protocol, 'FFmpeg(通用后备)')# 示例
工业相机协议 = select_tool_by_protocol('GigE Vision') # 输出: '厂家SDK + OpenCV'
网络流协议 = select_tool_by_protocol('RTSP') # 输出: 'FFmpeg/PyAV + OpenCV'2. 编码格式影响工具的内部配置
# 编码格式影响工具参数配置
encoding_impact = {"H.264/H.265": {"工具": "FFmpeg/OpenCV","关键配置": ["-c:v h264_cuvid", "-hwaccel cuda"], # 硬件加速"挑战": "OpenCV原生解码不稳定"},"MJPEG": {"工具": "OpenCV直接支持","关键配置": [], # 通常无需特殊配置"挑战": "带宽占用高"},"RAW/Bayer": {"工具": "工业相机SDK","关键配置": ["像素格式转换", "去马赛克"],"挑战": "需要特殊处理"}
}
def configure_tool_by_encoding(tool, encoding):"""根据编码格式配置工具参数"""encoding_configs = {'H.264': {'FFmpeg': ['-c:v', 'h264_cuvid', '-hwaccel', 'cuda'],'OpenCV': ['CAP_PROP_HW_ACCELERATION', 'CV_CAP_INTEL_MFX'],'PyAV': [{'codec': 'h264_cuvid'}]},'H.265': {'FFmpeg': ['-c:v', 'hevc_cuvid', '-hwaccel', 'cuda'],'OpenCV': [], # OpenCV对H.265支持有限'PyAV': [{'codec': 'hevc_cuvid'}]},'MJPEG': {'FFmpeg': ['-c:v', 'mjpeg_cuvid'],'OpenCV': [], # 原生支持良好'PyAV': [{'codec': 'mjpeg'}]}}return encoding_configs.get(encoding, {}).get(tool, [])# 示例:RTSP+H.264的完整配置
protocol = 'RTSP'
encoding = 'H.264'# 第一步:根据协议选工具
selected_tool = select_tool_by_protocol(protocol) # FFmpeg/PyAV + OpenCV# 第二步:根据编码配参数
ffmpeg_params = configure_tool_by_encoding('FFmpeg', encoding)
# 输出: ['-c:v', 'h264_cuvid', '-hwaccel', 'cuda']3.案例
案例1:海康工业相机(GigE Vision协议)
# 协议: GigE Vision → 选择工具: 海康MVS SDK
# 编码: 通常是MJPEG或H.264 → 配置: SDK内部自动处理from hkvision_mvs import MvCameracamera = MvCamera()
camera.MV_CC_CreateDevice()
camera.MV_CC_OpenDevice()
# 编码格式由SDK透明处理,用户无需关心
案例2:海康网络相机(RTSP协议)
# 协议: RTSP → 选择工具: FFmpeg
# 编码: H.264/H.265 → 配置: 硬件加速参数ffmpeg_command = ['ffmpeg','-rtsp_transport', 'tcp', # 协议相关配置'-i', 'rtsp://camera_url','-c:v', 'h264_cuvid', # 编码相关配置 '-hwaccel', 'cuda', # 编码相关配置'-f', 'rawvideo','-pix_fmt', 'bgr24','-'
]
案例3:USB工业相机(USB3 Vision协议)
# 协议: USB3 Vision → 选择工具: OpenCV DirectShow
# 编码: 通常为RAW → 配置: 系统自动处理
# 通过DirectShow访问工业相机(需先安装驱动)
import cv2
cap = cv2.VideoCapture(0, cv2.CAP_DSHOW) # 协议决定接口
# 编码格式由相机驱动自动处理
# 设置相机参数(工业相机重要配置)
cap.set(cv2.CAP_PROP_FRAME_WIDTH, 1920)
cap.set(cv2.CAP_PROP_FRAME_HEIGHT, 1080)
cap.set(cv2.CAP_PROP_FPS, 30) # 帧率
cap.set(cv2.CAP_PROP_EXPOSURE, 1000) # 曝光时间(微秒)
cap.set(cv2.CAP_PROP_GAIN, 0) # 增益while True:ret, frame = cap.read()if not ret:break# YOLO推理处理...cv2.imshow('Industrial Stream', frame)if cv2.waitKey(1) & 0xFF == ord('q'):breakcap.release()实际工程意义
协议错误 = 无法连接
选错工具:根本拿不到视频流
后果:系统完全不可用
编码配置错误 = 性能问题
配置不当:还能运行,但卡顿/高CPU
后果:系统不稳定,但可调试修复
4.ffmpeg的适用边界
FFmpeg 能用的摄像头:
网络协议摄像头:
支持 RTSP/RTMP/ONVIF 的监控相机(如海康/大华网络摄像机)
输出 HLS/HTTP-FLV 流的 IP 摄像头
部分 USB 摄像头(需系统驱动转为 V4L2/DirectShow)
FFmpeg 不能用的摄像头:
工业相机专用接口:
GigE Vision 相机(如 Basler/海康工业款)
USB3 Vision 相机(如 FLIR/Point Grey)
Camera Link 高速相机
需要特殊驱动的设备:
某些医疗/科研专用摄像头
自定义协议的专业设备
为什么工业相机不能用 FFmpeg
技术根源对比
特性 | 网络协议摄像头 | 工业相机 |
|---|---|---|
协议栈 | RTSP/RTP over TCP/IP | GigE Vision/USB3 Vision |
数据封装 | 标准 MPEG-TS/PS | 自定义帧格式(含元数据) |
控制接口 | ONVIF/HTTP API | GenICam 寄存器控制 |
典型用途 | 视频监控 | 机器视觉/测量 |
# 尝试用FFmpeg连接摄像头(通用测试命令)
ffmpeg -i <摄像头URL> -f null - -v error
# 若无报错则兼容,出现"Protocol not found"则不兼容误区1:"FFmpeg可以解码任何摄像头"
真相:FFmpeg 只能处理已封装成标准流协议的视频,无法直接读取硬件接口(如 GigE Vision 的原始帧数据)
误区2:"工业相机插上网线就是网络摄像头"
真相:工业相机的 GigE 接口 ≠ 普通网络协议,需要专用驱动(如 GigE Vision 协议栈)
误区3:"USB摄像头都能用FFmpeg"
真相:
普通UVC摄像头 → 可通过系统接口转接(V4L2/DirectShow)
USB3 Vision工业相机 → 必须用厂家SDK
工业场景的摄像头选型和采集方案
核心参数差异
特性 | 监控摄像头(矿山/港口) | 工业摄像头(工厂) |
|---|---|---|
检测目标 | 集装箱、车辆、人员(米级) | 零件缺陷、二维码(毫米级) |
视场范围 | 大范围(50-200米) | 小范围(0.1-2米) |
精度要求 | 识别级(能看清是什么) | 测量级(精确到像素) |
帧率 | 15-25fps(实时监控) | 50-500fps(高速捕捉) |
触发方式 | 连续采集 | 精确触发(与设备同步) |
特性 | 工业相机(直接采集) | RTSP相机(网络流) |
|---|---|---|
延迟 | 毫秒级(1-10ms) | 较高(100-500ms) |
稳定性 | 极高(硬件级) | 依赖网络质量 |
部署 | 本地连接,复杂 | 网络灵活,简单 |
成本 | 较高 | 相对较低 |
适用场景 | 高速产线、精密检测 | 安防监控、远程检测 |
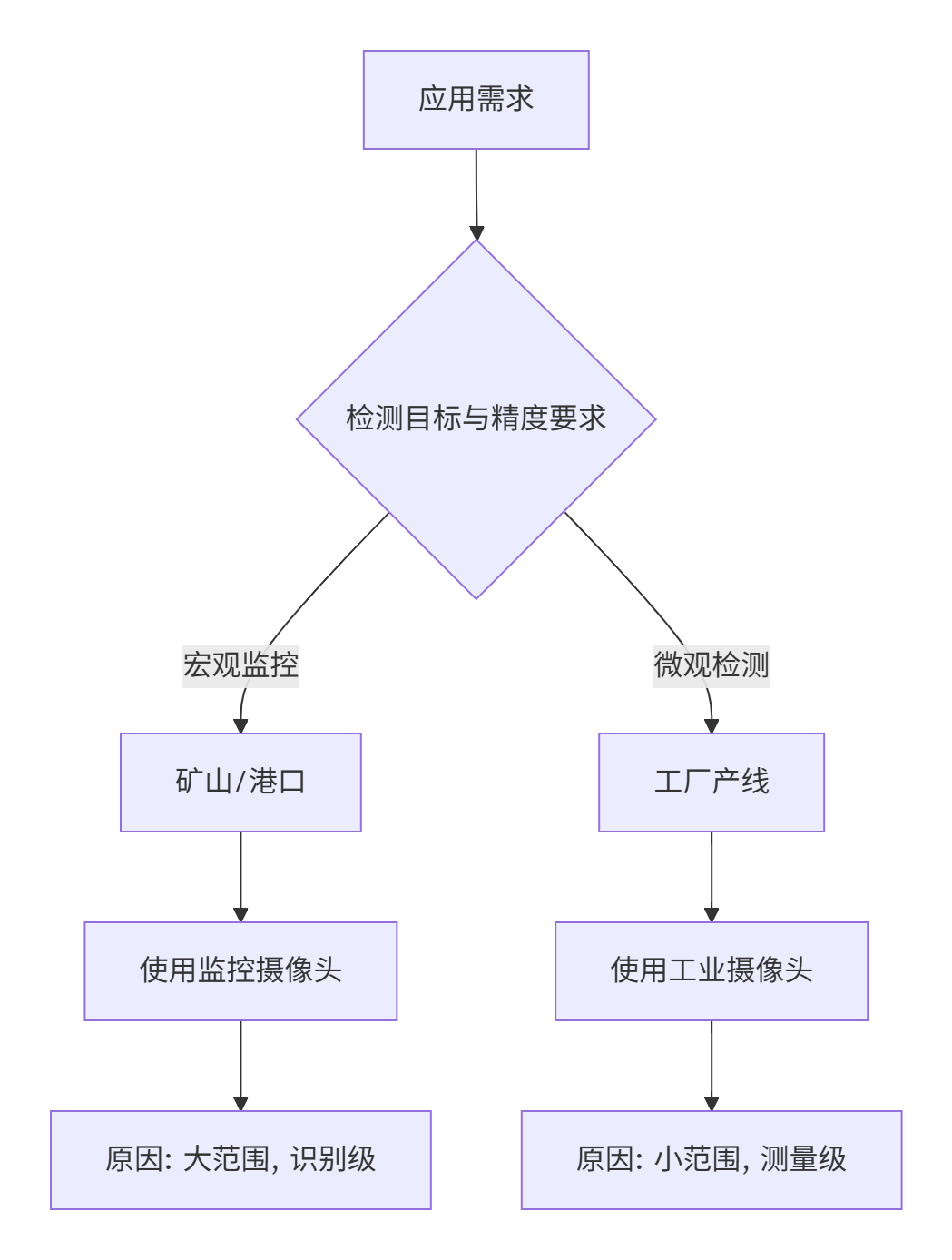
根本原因:需求决定技术选型
矿山/港口选择监控摄像头因为:
✅ 检测目标大(集装箱、车辆、人员)
✅ 距离远、范围大
✅ 精度要求相对较低
✅ 成本敏感(部署数量大)
✅ 环境适应性强
工厂选择工业摄像头因为:
✅ 检测目标小(零件缺陷、二维码)
✅ 距离近、精度要求极高
✅ 需要高速、同步触发
✅ 测量一致性要求严格
✅ 与自动化设备深度集成
核心原则:用合适的工具解决合适的问题,不过度配置也不将就应付。
1. 智慧矿山场景
mine_camera_requirements = {"环境挑战": ["防爆要求", "高粉尘", "低照度", "潮湿环境"],"检测目标": ["皮带跑偏", "大块煤识别", "人员安全", "设备状态"],"典型配置": {"防爆网络相机": "海康DS-2CD系列(防爆款)","分辨率": "200-400万像素","防护等级": "IP67/IP68","安装位置": ["皮带机头尾", "破碎机入口", "煤仓出入口"]}
}
# 智慧矿山典型采集代码
class MiningCameraSystem:def __init__(self):self.cameras = {'belt_head': 'rtsp://admin:123456@192.168.10.101/Streaming/Channels/101','belt_tail': 'rtsp://admin:123456@192.168.10.102/Streaming/Channels/101','crusher_entry': 'rtsp://admin:123456@192.168.10.103/Streaming/Channels/101'}def start_monitoring(self):"""启动皮带机监控"""for location, rtsp_url in self.cameras.items():# 使用FFmpeg稳定采集command = ['ffmpeg','-rtsp_transport', 'tcp', # 矿山网络不稳定,用TCP'-i', rtsp_url,'-fflags', 'nobuffer','-flags', 'low_delay','-f', 'image2pipe','-pix_fmt', 'bgr24','-']# 每个摄像头独立进程处理self.start_camera_process(location, command)2. 智慧工厂/智能制造
factory_camera_types = {"外观检测": {"相机类型": "高分辨率面阵工业相机","品牌": ["海康MV-CH", "Basler ace", "FLIR Grasshopper"],"接口": "GigE Vision/USB3 Vision","应用": "产品缺陷检测、二维码识别"},"定位引导": {"相机类型": "高速工业相机", "品牌": ["海康MV-CA", "Cognex In-Sight"],"接口": "GigE Vision","应用": "机械手定位、零件装配"},"流程监控": {"相机类型": "网络监控相机","品牌": "海康DS-2CD系列","接口": "RTSP over Ethernet","应用": "生产线状态监控"}
}
class FactoryVisionSystem:def __init__(self):self.camera_interfaces = {}def setup_industrial_cameras(self):"""工业相机采集(GigE Vision)"""# 高精度检测工位try:from hkvision_mvs import MvCameraself.camera_interfaces['defect_inspection'] = MvCamera()# 配置高分辨率采集(500万像素+)except ImportError:# 降级方案:使用OpenCV + GenICamimport cv2if cv2.__version__ >= '4.5':cap = cv2.VideoCapture()cap.open('gev://192.168.10.100') # GigE Visionelse:# 编译OpenCV时开启WITH_GIGE支持passdef setup_monitoring_cameras(self):"""监控相机采集(RTSP)"""# 生产线整体监控rtsp_urls = {'assembly_line': 'rtsp://192.168.10.200/Streaming/Channels/101','packaging_station': 'rtsp://192.168.10.201/Streaming/Channels/101'}for name, url in rtsp_urls.items():# 使用PyAV(比FFmpeg更Pythonic)import avcontainer = av.open(url, timeout=10)self.camera_interfaces[name] = container3. 智慧港口场景
port_vision_requirements = {"环境特点": ["大范围监控", "强腐蚀环境", "远距离观测", "昼夜切换"],"典型应用": {"岸桥监控": ["集装箱识别", "吊具定位", "防撞检测"],"场桥监控": ["箱号识别", "堆场管理", "自动驾驶引导"],"闸口监控": ["车牌识别", "集装箱号识别", "安全检测"]},"相机选型": {"远距离监控": "海康鹰眼/球机(DS-2DE系列)","高精度识别": "海康智能交通相机","恶劣环境": "港口专用防腐相机"}
}
class PortVisionSystem:def __init__(self):self.camera_groups = {'quay_cranes': [f'rtsp://crane_{i}:554' for i in range(1, 21)],'yard_cranes': [f'rtsp://yard_{i}:554' for i in range(1, 50)],'gate_cameras': [f'rtsp://gate_{i}:554' for i in range(1, 10)]}def start_distributed_processing(self):"""港口大规模摄像头分布式处理"""import multiprocessing as mpfrom concurrent.futures import ThreadPoolExecutorwith ThreadPoolExecutor(max_workers=16) as executor:for group_name, camera_urls in self.camera_groups.items():for url in camera_urls:executor.submit(self.process_camera_stream, url, group_name)def process_camera_stream(self, rtsp_url, location):"""单摄像头处理进程"""# 使用FFmpeg硬件解码(港口相机通常H.265编码)command = ['ffmpeg','-hwaccel', 'cuda', # NVIDIA GPU加速'-hwaccel_device', '0','-rtsp_transport', 'tcp','-i', rtsp_url,'-f', 'image2pipe','-pix_fmt', 'bgr24','-']# 长期稳定运行(7×24)while True:try:# 视频流处理逻辑frame = self.read_ffmpeg_frame(command)# 集装箱识别、车牌识别等AI算法self.yolo_detection(frame)except Exception as e:self.reconnect_camera(rtsp_url)4. 皮带机监控专项
belt_conveyor_issues = {"检测目标": ["皮带跑偏", "纵向撕裂", "异物堵塞","物料堆积", "托辊损坏", "人员入侵"],"安装要求": {"位置": "机头、机尾、转载点","角度": "垂直于皮带运行方向","照明": "红外补光(夜间监控)"},"相机选型": {"普通监控": "海康DS-2CD3系列(200万像素)","高精度检测": "海康MV-CA系列(500万像素工业相机)","防爆环境": "海康防爆网络相机"}
}
def load_camera_config(self):"""皮带机摄像头配置"""return {'head_camera': {'type': 'industrial', # 工业相机用于精确检测'interface': 'GigE','url': 'gev://192.168.1.100','purpose': '撕裂检测'},'tail_camera': {'type': 'network', # 网络相机用于状态监控 'interface': 'RTSP','url': 'rtsp://192.168.1.101/Streaming/Channels/101','purpose': '跑偏检测'}}def start_industrial_camera(self, config):"""工业相机采集(GigE Vision)"""# 使用厂家SDK获取最高质量图像from hikvision_mvs import MvCameracamera = MvCamera()camera.MV_CC_CreateDevice()camera.MV_CC_OpenDevice()# 配置高帧率采集(皮带高速运行)camera.MV_CC_SetFrameRate(30.0)camera.MV_CC_SetExposureTime(1000) # 微秒while True:frame = camera.MV_CC_GetImageBuffer()# 执行撕裂检测、异物检测算法self.belt_safety_detection(frame)def start_network_camera(self, config):"""网络相机采集(RTSP)"""# 使用PyAV稳定采集import avcontainer = av.open(config['url'], timeout=15)container.streams.video[0].thread_type = 'AUTO' # 多线程解码for frame in container.decode(video=0):img = frame.to_ndarray(format='bgr24')# 执行跑偏检测、堵料检测self.belt_alignment_detection(img)总结
应用领域 | 主要摄像头类型 | 采集方案 | 关键考虑因素 |
|---|---|---|---|
智慧矿山 | 防爆网络相机 | FFmpeg RTSP | 防爆认证、网络稳定性 |
智慧工厂 | 混合方案(工业+网络) | 厂家SDK + FFmpeg | 精度要求、实时性 |
智慧港口 | 高清网络球机 | FFmpeg集群 | 大规模、远距离 |
皮带机 | 工业相机(关键点) | 厂家SDK | 高精度、高帧率 |
网络相机(监控点) | FFmpeg/PyAV | 成本、覆盖范围 |
从网络相机开始:先掌握FFmpeg/PyAV处理RTSP流
逐步深入工业相机:遇到精度要求时再学习厂家SDK
重视环境适应性:工业场景的防护等级比分辨率更重要
考虑长期维护:选择有良好技术支持的品牌(如海康、大华)
核心原则:根据检测精度要求选择相机,根据部署环境选择防护等级,根据接口类型选择采集方案。