选取ToddlerBot作为第一台仿人机器人平台
1. 引言:重新定义AI机器人研究的可能性
ToddlerBot是一个开源的、与机器学习兼容的仿人机器人平台,由斯坦福大学设计团队开发。它以低成本、高灵活性著称,专为高效收集大规模、高质量的训练数据而设计,可同时应用于模拟环境和现实世界。
这款革命性平台仅需6000美元成本,却实现了:
- ✅ 30个精密自由度 - 媲美顶级实验室的全身运动能力
- ✅ 零样本策略迁移 - 数字孪生技术打破Sim2Real魔咒
- ✅ 模仿学习与强化学习 - 为AI研究提供理想平台
2. 产品设计与核心特点
2.1 硬件规格
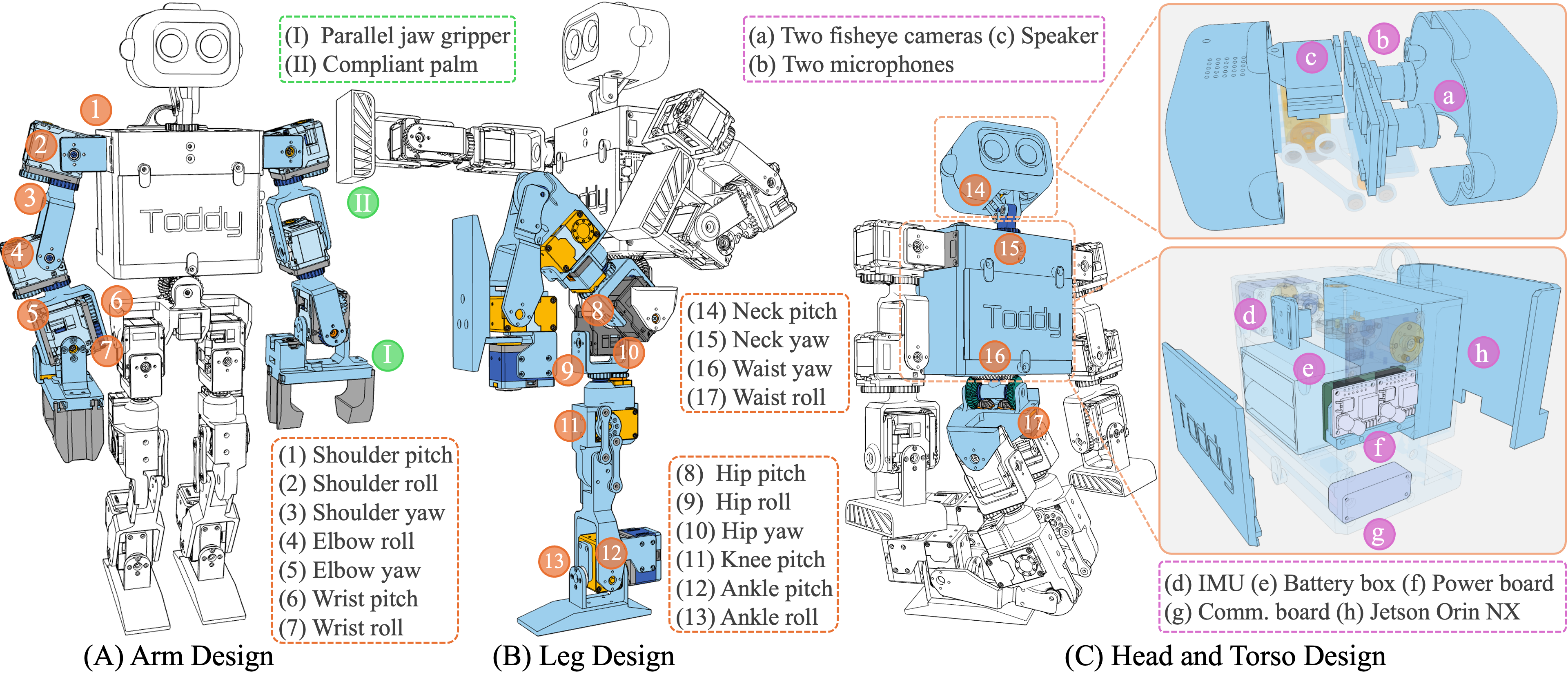
ToddlerBot具备30个主动自由度(DoFs),包括手臂(7×2)、腿部(6×2)、颈部(2)和腰部(2),这种设计确保了接近人类的灵活性和运动能力。
2.2 传感系统
ToddlerBot配备了全面的传感器套件:
- 鱼眼相机 - 提供广角视觉输入
- IMU(惯性测量单元) - 精确跟踪姿态
- 扬声器和麦克风 - 支持语音交互
- 关节编码器 - 精确控制每个自由度
2.3 计算平台
搭载NVIDIA Jetson Orin NX,实现本地运行机器学习模型的强大计算能力。

2.4 电机选择
ToddlerBot使用Dynamixel系列伺服电机,根据不同部位的扭矩需求选择不同型号:
- XC330-T288-T:用于颈部、腰部等低扭矩需求部位
- XC430-T240BB-T:用于肩部、踝关节等标准扭矩需求部位
- XM430-W210-T:用于膝关节、踝关节俯仰等高扭矩需求部位
- 2XL430-W250-T:用于手臂,平衡性能和成本
- 2XC430-W250-T:用于髋关节,提供足够扭矩

2.5 末端执行器
提供两种设计选择:
- 柔性手掌 - 适合复杂抓取任务
- 平行夹爪 - 适合精确操作
3. 技术原理
3.1 数字孪生与零点校准
ToddlerBot最突出的技术创新是实现从模拟到现实的无缝迁移,其关键在于:
- 数字孪生技术:基于精确物理模型和系统识别(SysID),创建高保真模拟模型
- 零点校准:使用3D打印校准装置,快速校准机器人零点位置
- 电机系统识别:通过命令电机跟踪扫频信号,拟合执行模型,确保动态参数准确性
3.2 机器学习方法
ToddlerBot支持多种先进的机器学习方法:
- 强化学习:基于MuJoCo和PPO算法训练步行和转向策略
- 模仿学习:利用远程操作收集的数据,训练扩散策略(Diffusion Policy)
- 零样本迁移:无需在真实机器人上进行微调,仿真策略即可直接部署
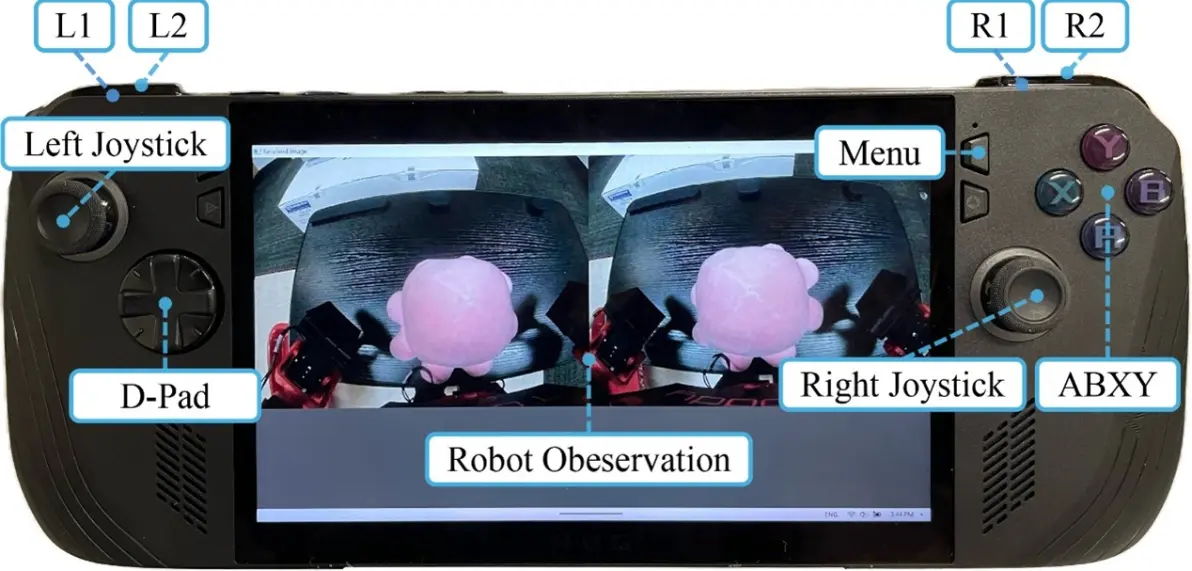
3.3 远程操作技术
ToddlerBot通过直观的远程操作系统实现高效数据收集:
4. 功能与应用
4.1 全向行走与灵活运动
通过强化学习和零样本迁移,ToddlerBot实现了稳定的全向行走能力:
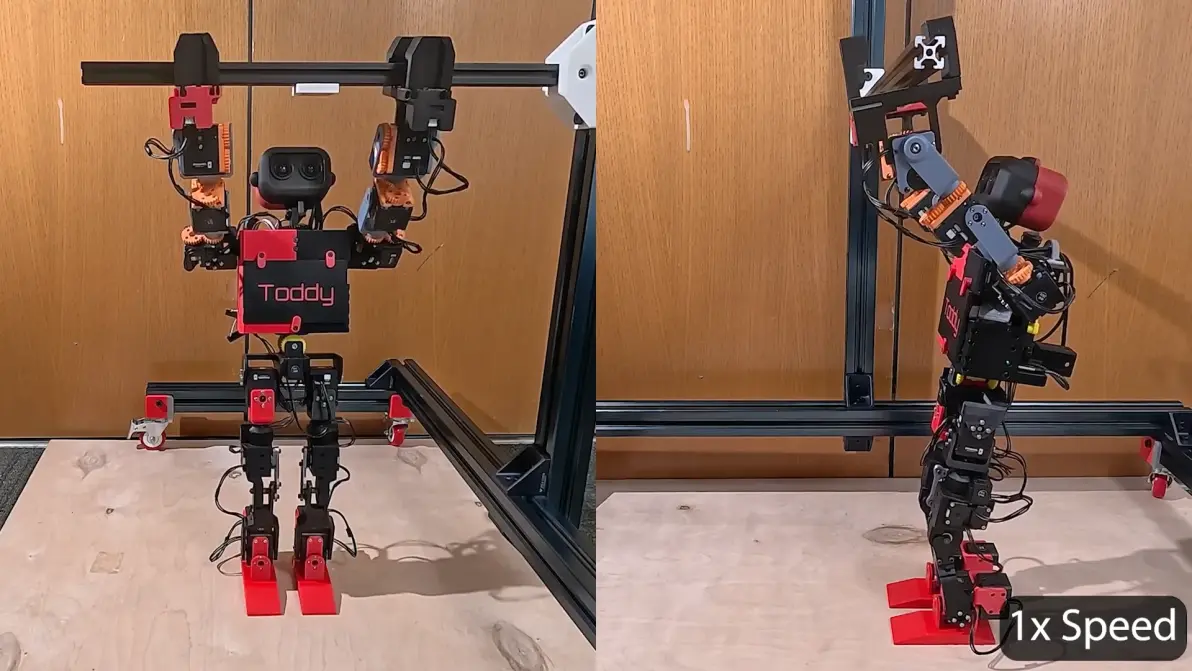
4.2 高难度身体控制
ToddlerBot展示了令人印象深刻的身体控制能力,包括:
-
俯卧撑能力:集成OpenAI的Realtime API与GPT-4,支持复杂动作执行
-
引体向上能力:通过AprilTag视觉标记系统定位单杠,实现准确抓取
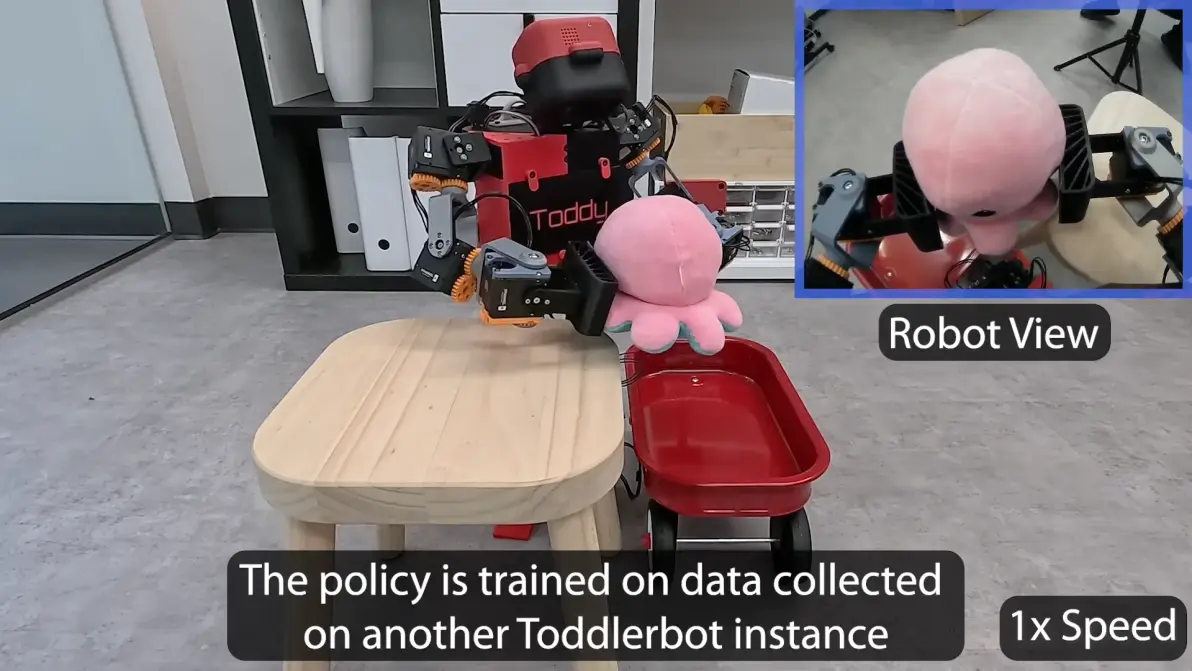
4.3 双手操作与全身操作
基于RGB的扩散策略,通过少量(约60次)演示进行训练,实现复杂物体操作:
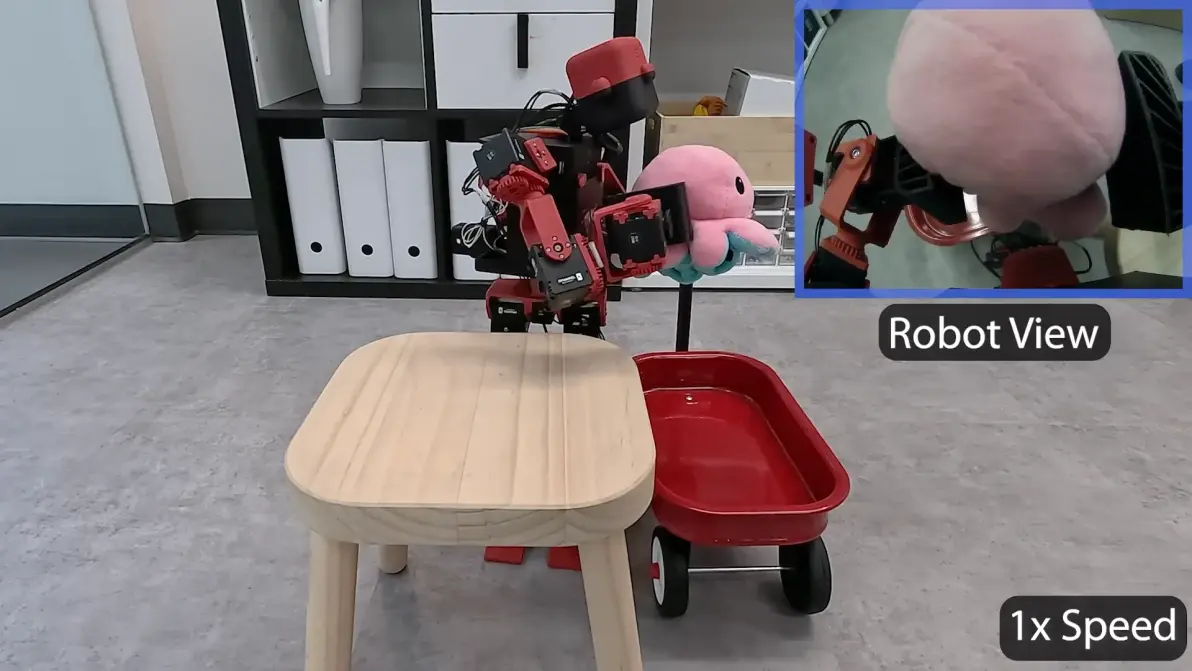
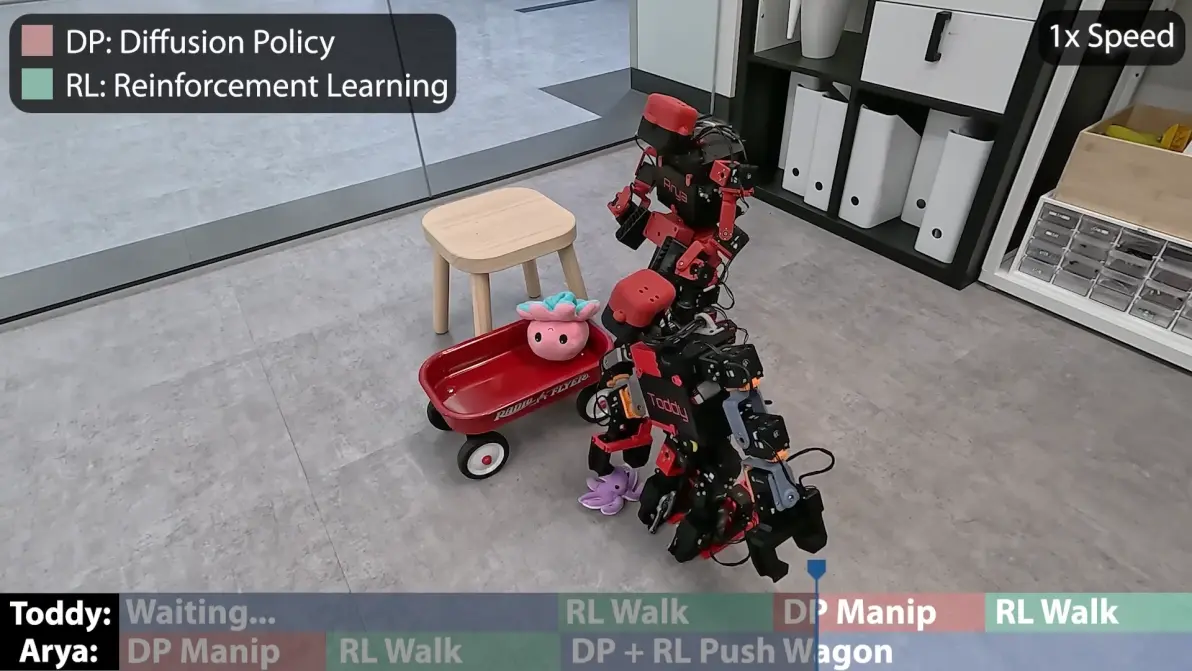
4.4 技能串联
支持多种策略的组合,如抓取把手后推动小车:

4.5 语音交互
集成OpenAI的实时API,支持自然语言对话和指令执行。
5. 性能测试结果
5.1 臂展测试
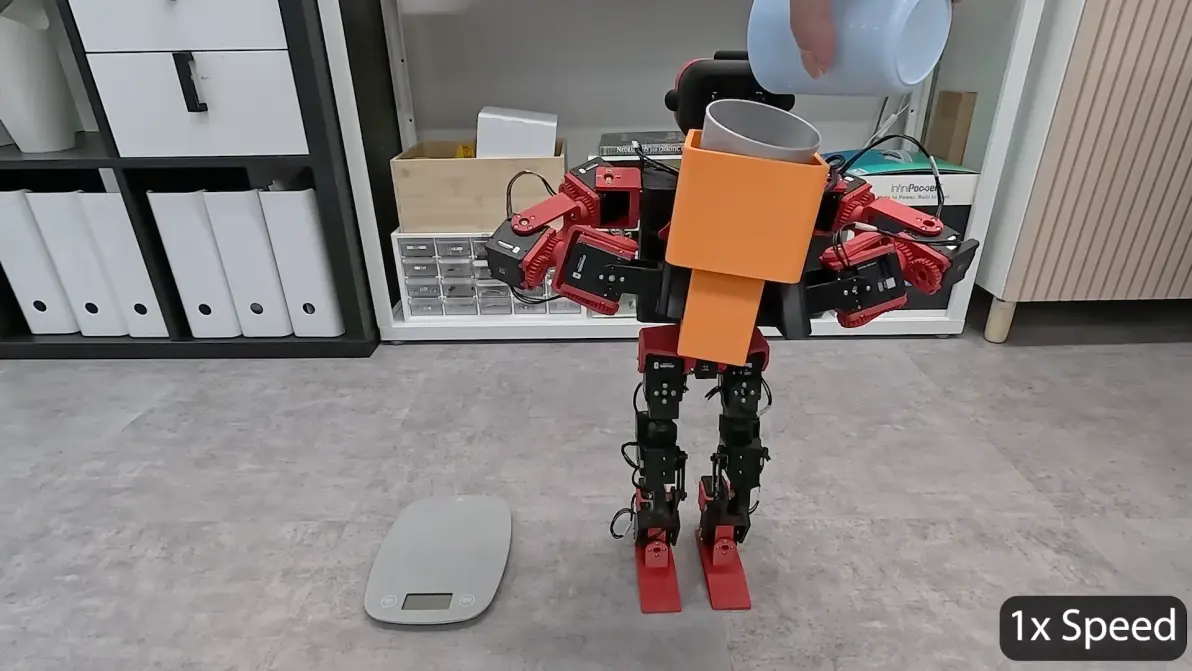
ToddlerBot能够抓取体积为其躯干体积14倍的物体(27×24×31 cm³):

5.2 负载测试
在保持平衡的同时,能够提起1484克的重物(相当于自重的40%):
5.3 续航能力
运行行走强化学习策略时,可持续行走19分钟,并能承受7次跌落:

5.4 多机器人协作
两个ToddlerBot能够协作完成房间整理等复杂任务:
6. 开发者资源
ToddlerBot是一个完全开源的项目,提供丰富的开发资源:
- 项目官网:https://toddlerbot.github.io/
- GitHub仓库:https://github.com/hshi74/toddlerbot
- 详细文档:https://hshi74.github.io/toddlerbot
- 3D模型:Onshape和MakerWorld
6.1 快速入门代码示例
# 运行ToddlerBot的push-up动作示例
python toddlerbot/policies/run_policy.py --policy replay --run-name push_up --vis view
6.2 组装与维护
提供完整的开源组装手册和视频教程,便于用户自行组装和维护:
组装ToddlerBot通常需要30-40小时,主要分为以下几个步骤:
- 3D打印零件制作:使用常见的FDM打印机,推荐材料为PETG或PLA+
- 电子设备组装:包括控制板、电源系统和传感器的安装
- 关节组装:按照详细步骤组装30个自由度的关节系统
- 校准与测试:使用专用工具进行零点校准和基本功能测试
维护方面,ToddlerBot的设计考虑了长期使用的需求:
- 关键部件可快速拆卸更换
- 常见问题的故障排除指南
- 社区支持和问题解决资源
- 定期软件更新和功能改进
6.3 硬件与成本分析
ToddlerBot的硬件选择基于性能与成本的平衡考量,总成本约6000美元,主要包括:
- 电机系统:约3500美元(30个Dynamixel系列伺服电机)
- 计算平台:约1000美元(NVIDIA Jetson Orin NX)
- 结构部件:约500美元(包括3D打印材料和金属连接件)
- 传感器与配件:约1000美元(相机、IMU、电源系统等)
与商业人形机器人相比,ToddlerBot在保持高性能的同时,将成本降至可接受范围,使其成为研究和教育领域的理想选择。选择舵机而非准直驱(QDD)方案是综合考虑了小尺寸机器人的特性和成本因素,在当前尺寸下,传统舵机实际上比QDD更具优势。
7. 代码架构与模块功能
7.1 代码结构总览
ToddlerBot代码库主要包含以下核心模块:
- sensing: 传感器接口与数据处理
- policies: 各种运动控制策略实现
- sim: 模拟环境和真实世界接口
- locomotion: 行走和运动学习相关代码
- tools: 实用工具和辅助功能
- utils: 通用工具函数
- descriptions: 机器人描述文件和模型
- manipulation: 操作和抓取相关代码
7.2 传感系统(sensing)
传感模块提供了与各类传感器交互的接口:
# 示例:使用相机模块
from toddlerbot.sensing.camera import Camera# 初始化相机
camera = Camera(device_id=0, # 相机设备IDwidth=640, # 图像宽度height=480, # 图像高度fps=30, # 帧率use_thread=True # 是否使用线程进行异步采集
)# 启动相机
camera.start()# 获取当前帧
frame = camera.get_frame()# 使用完后释放资源
camera.stop()
传感模块还包含麦克风和扬声器接口,支持语音交互功能:
# 麦克风和扬声器使用示例
from toddlerbot.sensing.microphone import Microphone
from toddlerbot.sensing.speaker import Speaker# 初始化麦克风
mic = Microphone(channels=1, # 通道数sample_rate=24000, # 采样率chunk_size=1024 # 数据块大小
)# 初始化扬声器
speaker = Speaker(channels=1, # 通道数sample_rate=24000 # 采样率
)# 开始录音
mic.start()
audio_data = mic.get_audio(duration=5) # 获取5秒钟的音频
mic.stop()# 播放音频
speaker.play(audio_data)
7.3 策略系统(policies)
策略模块实现了各种运动控制算法,是ToddlerBot行为的核心:
7.3.1 基本策略
所有策略继承自BasePolicy类,提供统一的接口:
# 策略的基本结构
from toddlerbot.policies import BasePolicyclass MyCustomPolicy(BasePolicy, policy_name="my_custom"):def __init__(self, name, robot, init_motor_pos):super().__init__(name, robot, init_motor_pos)# 自定义初始化代码def step(self, obs, is_real=False):# 策略核心逻辑# 输入:当前观测值# 输出:控制命令和电机目标位置control_inputs = {}motor_targets = self.init_motor_pos.copy()# 根据观测计算控制命令return control_inputs, motor_targets