Ubuntu20.04本地配置IsaacGym Preview 4的G1训练环境(二):训练与推理
Ubuntu20.04本地配置IsaacGym Preview 4的G1训练环境(二):训练与推理
- 训练
- 推理
训练
根据(一)配置好环境后,在G1目录下启动终端,并进入your_name虚拟环境,执行:
python unitree_rl_gym/legged_gym/scripts/train.py --task=g1 --headless
默认是训练3000轮,若需要更多回合训练,执行:
python unitree_rl_gym/legged_gym/scripts/train.py --task=g1 --headless --max_iterations=10000
若一切正常,终端显示:
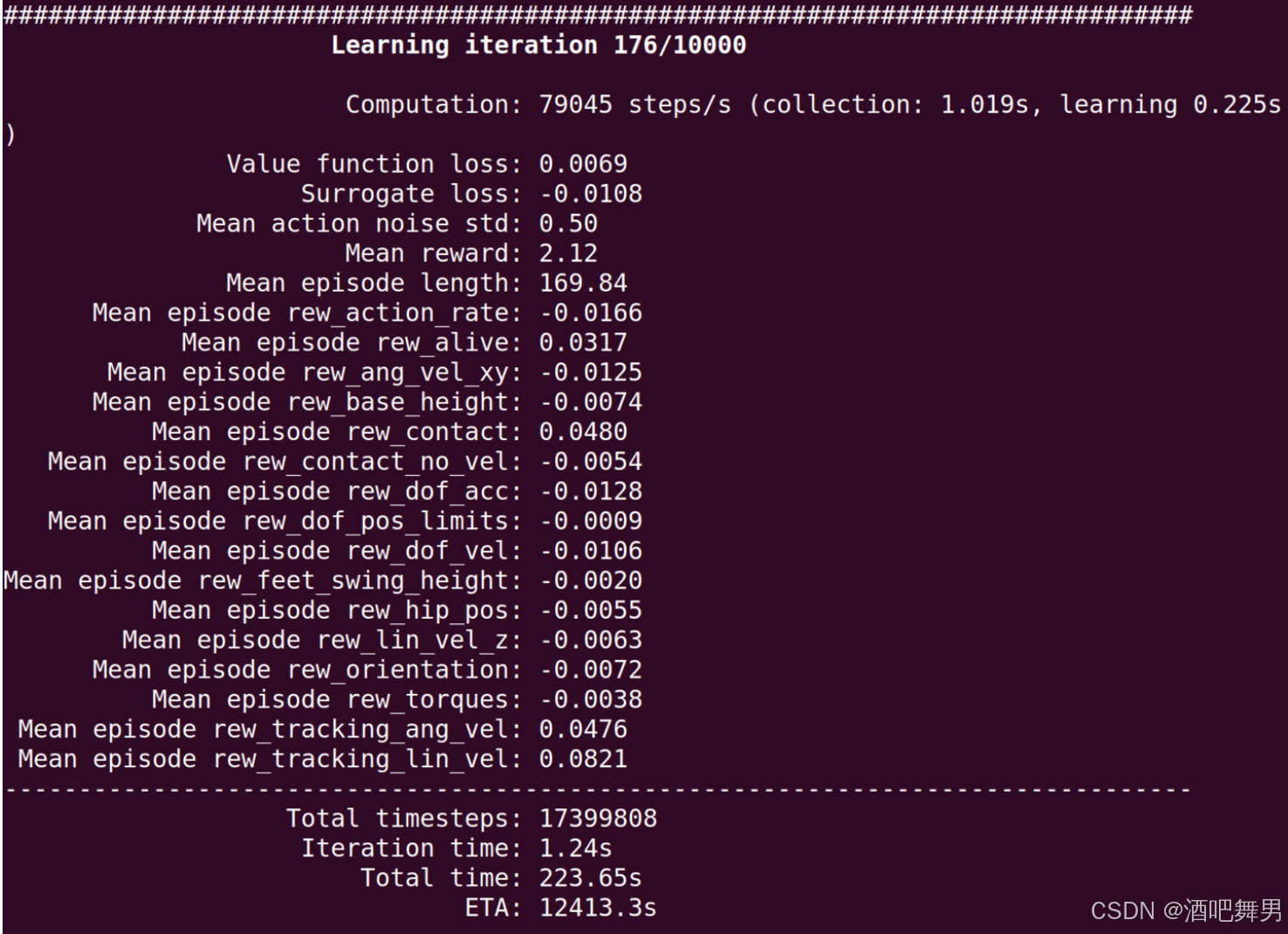
同时,训练过程中的信息还可通过tensorboard查阅,新开一个终端,同样在G1目录下和your_name虚拟环境中,执行:
tensorboard --logdir unitree_rl_gym/logs/g1/xxx
# 注:在logs/g1文件夹下可能存在多个文件,每个文件以时间命名,此处xxx替换为最新时间文件夹的名称(按tab键自动补全),例如tensorboard --logdir unitree_rl_gym/logs/g1/Dec19_15-37-38_
终端出现如下显示:
 打开浏览器输入localhost:6006或按住ctrl键点击终端中的http://localhost:6006/,可显示页面:
打开浏览器输入localhost:6006或按住ctrl键点击终端中的http://localhost:6006/,可显示页面:
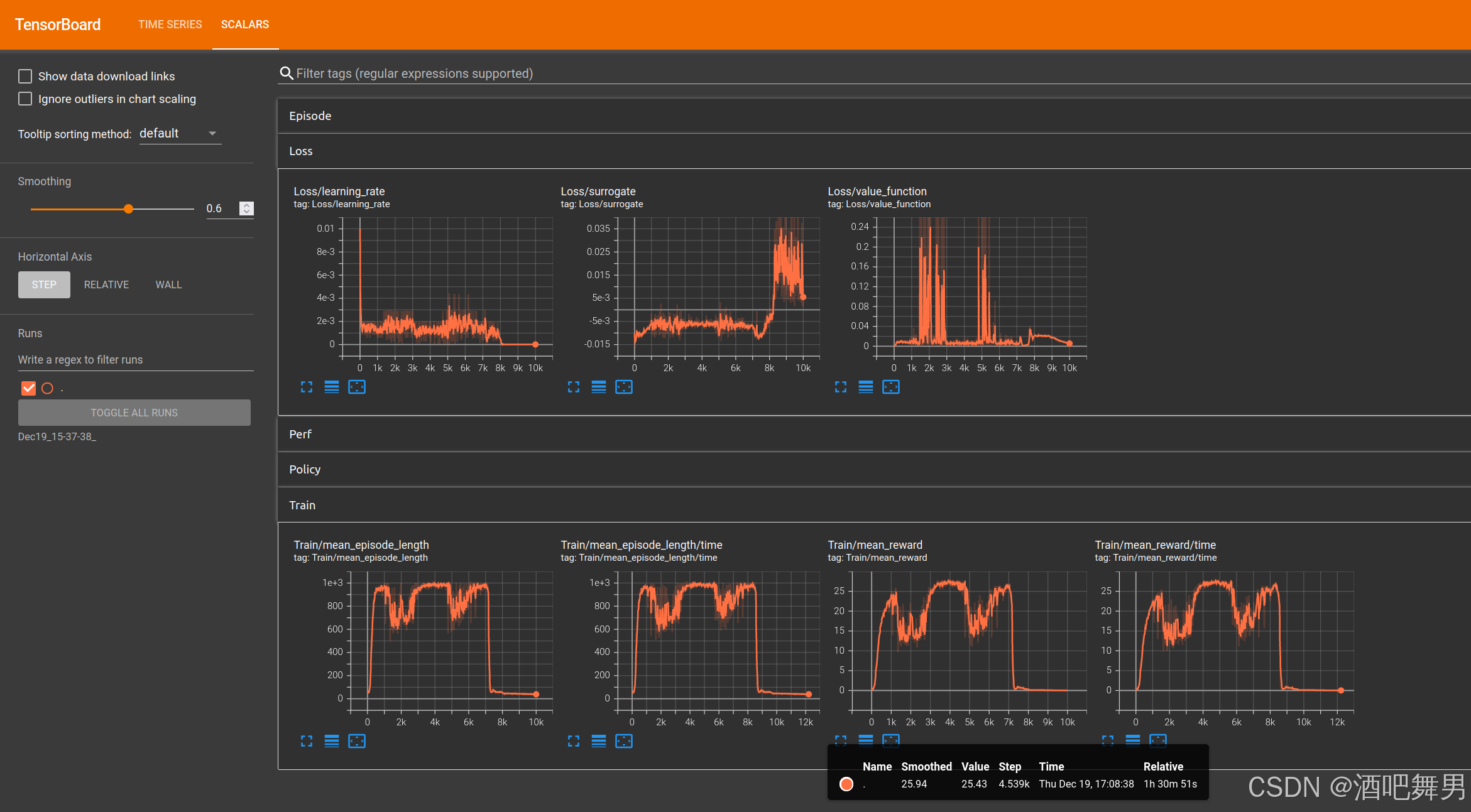
推理
由于训练后期奖励下降,说明后期策略不如中期策略,因此在测试时加载最高reward时的model,从Train目录下第三幅图Train/mean_reward中,加载大约4000回合的model:
python unitree_rl_gym/legged_gym/scripts/play.py --task=g1 --checkpoint=4000
出现可视化界面:
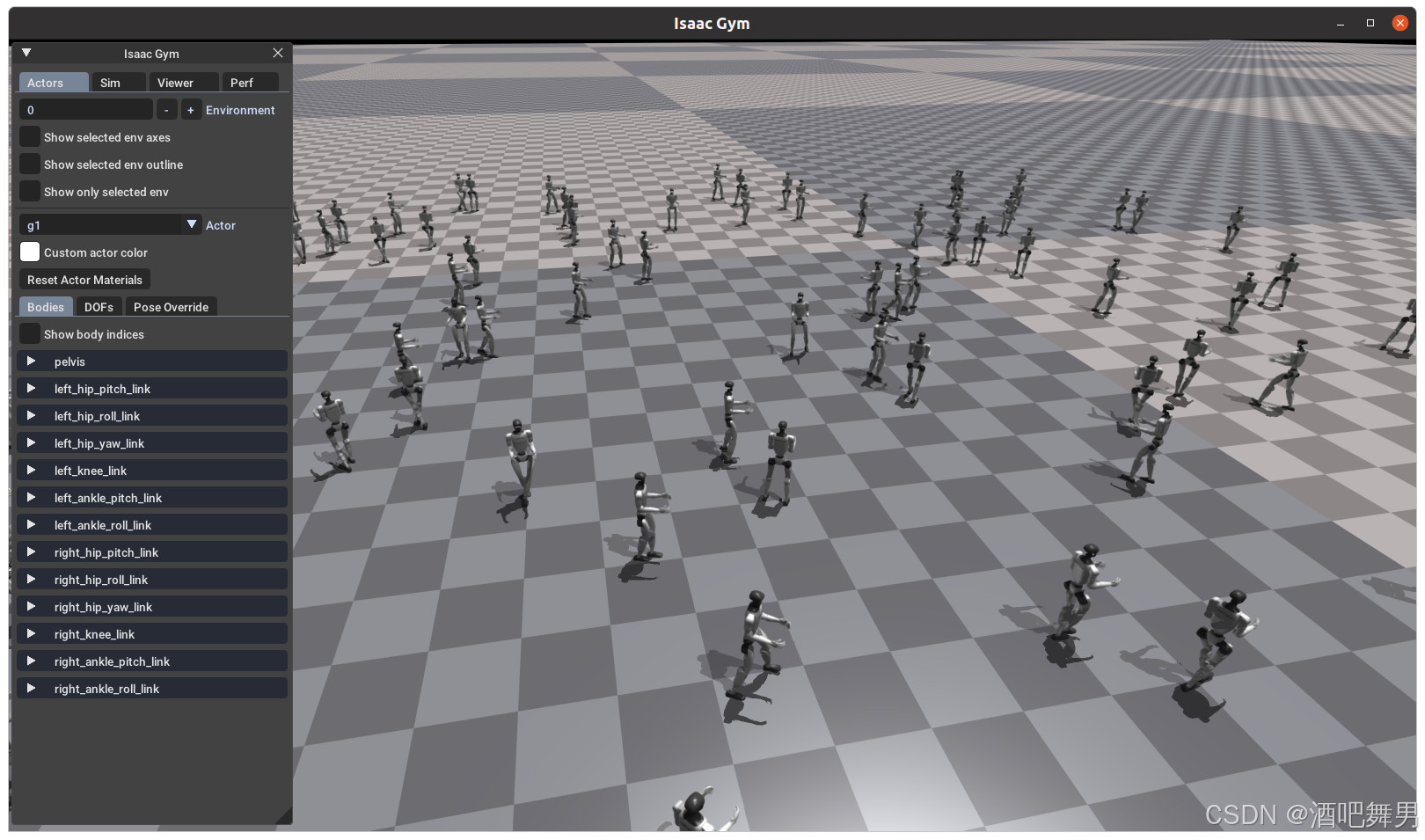
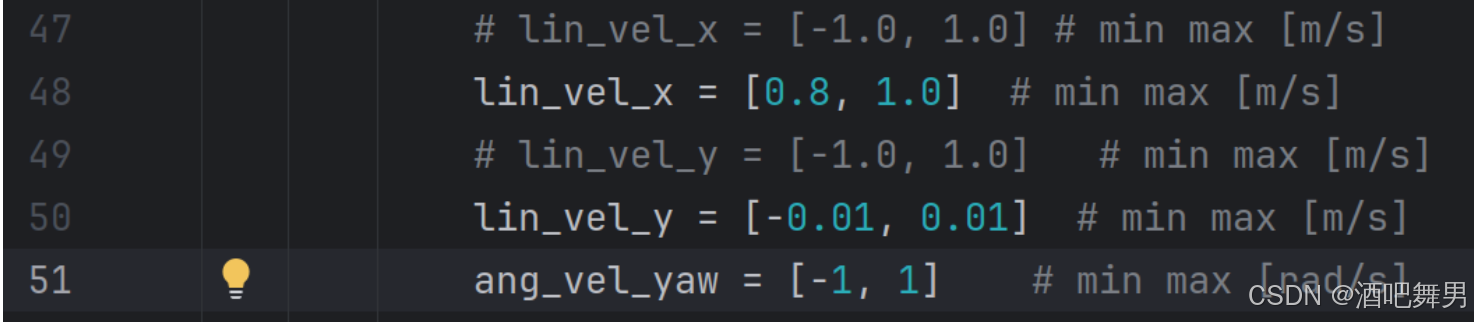
此时的机器人会朝着任意方向行走,这主要是由于参数文件中对于机器人x和y方向的线速度范围未做调整,通过修改unitree_rl_gym/legged_gym/envs/base/legged_robot_config.py文件中的lin_vel_x、lin_vel_y范围可实现机器人只往前行走: