MEMS结构光在3D人脸识别中的系统优化
随着人脸识别技术在金融支付、门禁系统、智能设备解锁等场景的广泛应用,3D人脸识别因其更高的安全性正逐渐取代传统的2D识别技术。在众多3D感知方案中,MEMS结构光技术凭借其小体积、低功耗、高精度的优势,成为移动设备的首选方案。然而,将MEMS结构光技术应用与人脸识别系统仍面临诸多挑战,需要进行深度的系统级优化。
一、系统架构与工作原理
1.1MEMS结构光人脸识别系统组成
完整的MEMS结构光人脸识别系统包含三个核心子系统:
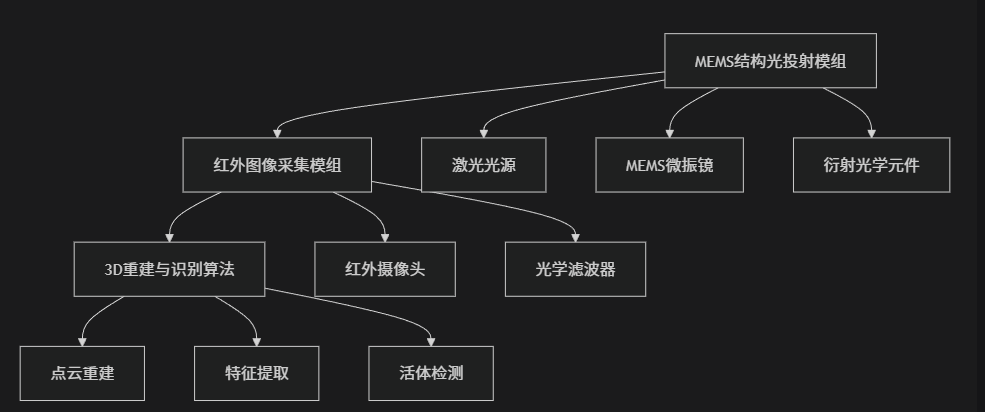
1.2工作流程优化
传统流程:
激光发射 → 结构光投射 → 图像采集 → 3D重建 → 特征匹配
优化后流程:
智能功率控制 → 自适应图案投射 → 多帧融合采集 → 快速3D重建 → 多层次验证
二、光学系统优化
2.1激光安全与功率优化
人脸识别系统必须满足Class 1激光安全标准,这要求对激光功率进行精确控制:
动态功率调节策略:
// 基于环境光和距离的功率控制算法
typedef struct {float ambient_light; // 环境光强度float working_distance; // 工作距离float min_power; // 最小功率float max_power; // 最大功率
} PowerControlParams;float calculate_optimal_power(PowerControlParams *params) {float base_power = params->min_power;// 环境光补偿if (params->ambient_light > 1000) { // 强光环境base_power *= 1.5;}// 距离补偿(平方反比定律)float distance_factor = pow(0.5 / params->working_distance, 2);base_power *= distance_factor;// 安全限幅return constrain(base_power, params->min_power, params->max_power);
}安全保护机制:
- 实时能量监测:确保单次曝光能量低于安全阈值
- 故障保护:硬件级过流、过温保护
-
时序控制:避免长时间连续照射
2.2散斑图案优化设计
结构光图案的质量直接影响识别精度
散斑特性要求:
| 参数 | 要求值 | 优化目标 |
| 散斑大小 | 3-8像素 | 匹配传感器特性 |
| 对比度 | >60% | 提高信噪比 |
| 随机性 | 自相关峰值旁瓣比<0.2 | 减少误匹配 |
| 密度 | 300-500点/平方厘米 | 平衡精度与速度 |
散斑优化方法:
- 相位板设计:优化衍射光学元件表面微结构
- 多投影模式:根据不同场景切换图案密度
- 动态对比度调整:适应不同肤色和反光特性
三、MEMS微振镜控制优化
3.1扫描精度提升
人脸识别对扫描精度要求极高,需要从多个维度进行优化:
位置精度控制
class MirrorPositionControl:def __init__(self):self.position_sensors = CapacitivePositionSensors()self.pid_controller = PIDController(kp=1.2, ki=0.1, kd=0.05)self.calibration_data = Nonedef high_precision_scan(self, target_pattern):# 温度补偿compensated_target = self.temperature_compensation(target_pattern)# 前馈控制feedforward = self.calculate_feedforward(compensated_target)# 闭环反馈actual_position = self.position_sensors.read()error = compensated_target - actual_positionfeedback = self.pid_controller.update(error)# 驱动信号合成drive_signal = feedforward + feedbackreturn self.apply_drive_signal(drive_signal)def temperature_compensation(self, target):if self.calibration_data is None:return targettemp = self.read_temperature()compensation = self.calibration_data.get_compensation_value(temp)return target * compensation非线性校正:
- 查找表校准:在全工作范围内建立角度-电压映射表
- 谐波失真补偿:抑制驱动信号的高次谐波
- 交叉轴耦合补偿:消除双轴扫描时的互相影响
3.2可靠性设计
人脸识别设备通常要求3-5年的使用寿命,可靠性设计至关重要:
机械结构强化:
- 抗冲击设计:限位结构优化,承受>1000g机械冲击
- 疲劳寿命分析:基于Mimer法则的累积损伤评估
- 材料选择:采用高强度硅材料,疲劳寿命>100亿次循环
故障检测与恢复:
- 实时健康监测:振动频率、Q值变化监测
- 自适应重校准:性能退化时自动触发重新校准
-
冗余设计:关键传感器备份,提高系统可靠性
四、图像处理算法优化
4.1深度计算精度提升
3D人脸识别的精度很大程度上取决于深度计算准确性:
抗干扰算法:
class RobustDepthCalculation:def __init__(self):self.confidence_threshold = 0.7self.multi_frame_buffer = CircularBuffer(size=5)def calculate_depth_map(self, structured_light_images):# 多帧融合降噪fused_images = self.temporal_fusion(structured_light_images)# 相位解包裹unwrapped_phase = self.robust_phase_unwrapping(fused_images)# 深度计算depth_map = self.phase_to_depth(unwrapped_phase)# 置信度评估confidence_map = self.calculate_confidence(fused_images, depth_map)# 后处理优化optimized_depth = self.post_process_depth(depth_map, confidence_map)return optimized_depth, confidence_mapdef robust_phase_unwrapping(self, images):# 结合多频率相位解包裹coarse_phase = self.coarse_unwrapping(images)fine_phase = self.fine_unwrapping(images)# 一致性校验return self.consistency_check(coarse_phase, fine_phase)环境适应性优化:
- 强光抑制:自适应曝光与光学滤波协同工作
- 肤色适应:针对不同肤色优化深度计算参数
- 动态范围扩展:HDR技术处理高对比场景
4.2活体检测增强
活体检测是防止照片、视频攻击的关键:
多模态活体检测:
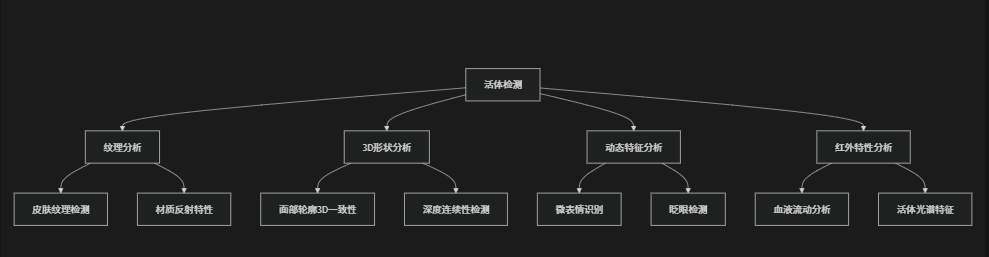
防攻击能力:
- 照片攻击识别:基于3D形状和纹理特征
- 视频攻击防护:动态特征分析和红外特性监测
- 3D面具识别:细微形状差异和材质分析
五、系统性能测试与优化
5.1关键性能指标
人脸识别系统的性能需要从多个维度评估:
| 性能指标 | 要求值 | 测试方法 |
| 误识率 | <0.0001% | 百万级负样本测试 |
| 拒识率 | <1% | 万级正样本测试 |
| 识别速度 | <500ms | 端到端时间测量 |
| 工作距离 | 0.3-1.2m | 不同距离测试 |
| 角度适应性 | ±15°偏转,±10°倾斜 | 多角度测试 |
5.2环境适应性测试
系统需要在各种极端环境下保持稳定性能:
光照适应性:
- 暗光环境:0.1lux下仍能正常工作
- 强光环境:100,000lux直射阳光下的稳定性
- 逆光场景:背景光>10,000lux时的识别能力
温度适应性:
- 低温测试:-20℃环境下启动和运行
- 高温测试:+60℃高温下的长期稳定性
- 温度循环:-20℃至+60℃快速温变测试
六、功耗与成本优化
6.1能效优化策略
移动设备对功耗极为敏感,需要精细化的功耗管理:
智能功耗控制:
class AdaptivePowerManagement:def __init__(self):self.power_modes = {'sleep': 0.1, # mW'standby': 1.0, # mW'ready': 10.0, # mW'active': 100.0 # mW}self.current_mode = 'sleep'def mode_transition(self, system_state, user_behavior):# 基于系统状态和用户行为的智能模式切换if system_state == 'pocket' or system_state == 'bag':self.set_mode('sleep')elif user_behavior == 'approaching':self.set_mode('ready')elif user_behavior == 'recognition':self.set_mode('active')else:self.set_mode('standby')def set_mode(self, new_mode):if new_mode != self.current_mode:self.power_control.set_power(self.power_modes[new_mode])self.current_mode = new_mode功耗分布优化:
- 激光驱动优化:占空比控制,减少平均功率
- MEMS驱动优化:谐振驱动降低动态功耗
- 处理算法优化:降低计算复杂度,减少处理器功耗
6.2成本控制策略
在保证性能的前提下控制成本是商业化的关键:
硬件成本优化:
- 芯片选型:选择高集成度解决方案
- 光学元件:批量生产工艺降低成本
- 校准流程:自动化校准减少人工成本
生产测试优化:
- 并行测试:提高生产测试效率
- 智能标定:减少标定时间和成本
- 良率提升:工艺优化提高产品良率
结语
MEMS结构光在3D人脸识别领域的系统优化是一个多学科交叉的复杂工程,涉及光学、机械、电子、算法等多个技术领域。通过持续的技术创新和系统优化,MEMS结构光技术将在安全性、可靠性和用户体验方面不断提升。