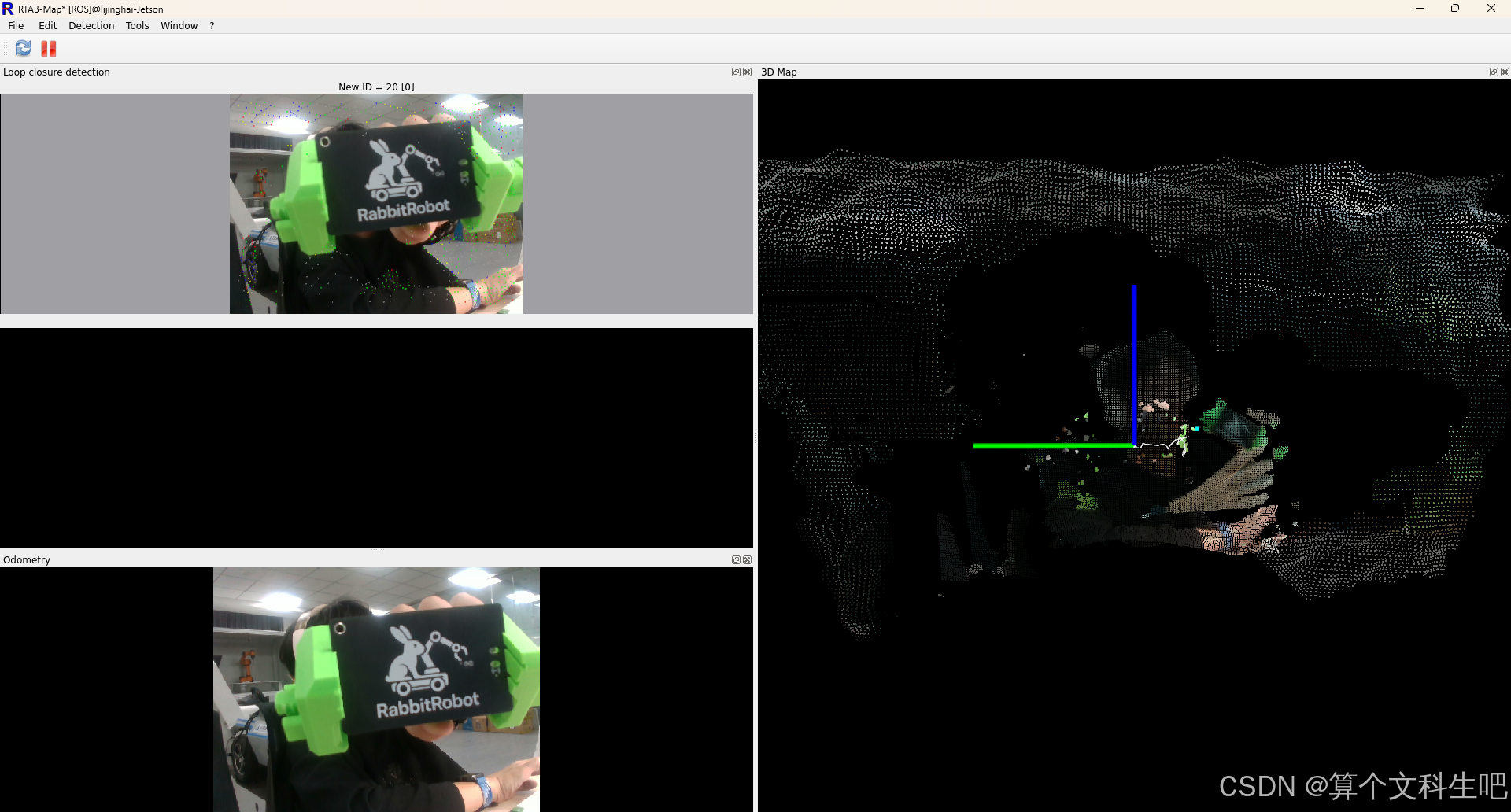
在Jetson 上使用Intel RealSense D435运行RTAB-Map就行建图
🐇 RabbitRobot-D435-L1lidar-RTABMap-ROS2
RTAB-Map 融合 LiDAR 与双目相机的建图导航
[!note]
本项目基于 LiDAR、RGB-D 相机与 IMU 的多模态融合技术,为实现了移动小车的 三维建图与自主导航为目标。系统采用 Unitree L1 激光雷达 提供高精度几何结构信息,结合 Intel RealSense D435 相机 提供彩色与深度数据,并融合 MPU6050 惯性测量单元 (IMU) 实现姿态与运动状态的补偿与优化。
通过 FAST-LIO2 与 RTAB-Map 的多源融合建图算法,系统能够在复杂环境下实现高精度的环境感知、鲁棒的位姿估计与实时自主导航功能,为 多传感器融合 SLAM 与智能移动机器人研究 提供了一个可靠的实验与开发平台。This project integrates LiDAR (Unitree L1), RGB-D camera (Intel RealSense D435), and IMU (MPU6050) to achieve 3D mapping and autonomous navigation for mobile robots.
Using FAST-LIO2 and RTAB-Map, the system fuses geometric, visual, and inertial information to provide robust localization and environmental understanding even in complex scenarios, offering a reliable platform for multi-sensor SLAM research and intelligent robotics.

项目地址 :https://github.com/lijinghai/RabbitRobot-D435-L1lidar-RTABMap-ROS2