【 论文精读】VIDM:基于扩散模型的视频生成新范式
标题:VIDM: Video Implicit Diffusion Models
作者:Kangfu Mei, Vishal M. Patel
单位:Johns Hopkins University
发表:2023 年,AAAI(AAAI Conference on Artificial Intelligence)
论文链接:https://arxiv.org/pdf/2212.00235
代码链接:https://github.com/MKFMIKU/VIDM
项目链接:https://kfmei.page/vidm/
关键词:视频生成、扩散模型(Diffusion Models)、隐式条件建模(Implicit Condition Modeling)、位置组归一化(Positional Group Normalization)、采样空间截断(Sampling Space Truncation)、鲁棒性惩罚(Robustness Penalty)、Fréchet 视频距离(FVD)
一、研究背景与动机
视频生成的核心挑战在于同时建模空间维度的帧质量与时间维度的运动连续性。在 VIDM 提出之前,主流视频生成方法主要分为两类,但均存在明显局限:
1. 传统生成模型的局限
- GAN-based 方法:如 MoCoGAN-HD、StyleGAN-V 等,虽能生成一定质量的视频,但存在训练不稳定、模式崩溃(Mode Collapse)问题,且难以精准建模视频的时空动态变化,生成的长视频易出现帧间不连续。
- 其他生成范式: autoregressive 模型(如 VideoGPT)依赖帧间逐次生成,计算成本高;时间序列模型(如 TATS)则在高分辨率视频生成任务中表现力不足。
2. 扩散模型的机遇与挑战
扩散模型(如 DDPM)通过 “加噪 - 去噪” 的迭代过程,在图像生成领域实现了超越 GAN 的质量与多样性,但直接迁移到视频生成面临两大核心问题:
- 时空建模难题:视频是 3D 时空数据(帧宽 × 帧高 × 时间步),传统 2D 扩散模型无法捕捉帧间运动关联,易生成 “静态图像序列” 而非连贯视频。
- 条件机制设计:扩散模型的性能高度依赖条件信息的利用,如何设计适配视频运动的条件机制,是实现高质量视频生成的关键。
基于此,VIDM 提出了 “分离建模内容与运动” 的思路,通过隐式条件机制将运动信息融入扩散过程,同时引入多项优化策略解决上述难题,显著提升了生成视频的质量与连续性。
二、核心方法:VIDM 的技术框架
VIDM 的整体架构分为内容生成器(Content Generator) 与运动生成器(Motion Generator) 两部分,前者负责生成高质量初始帧,后者负责基于初始帧与隐式运动条件生成后续帧,最终通过自回归方式构建完整视频。整体框架如图2所示:
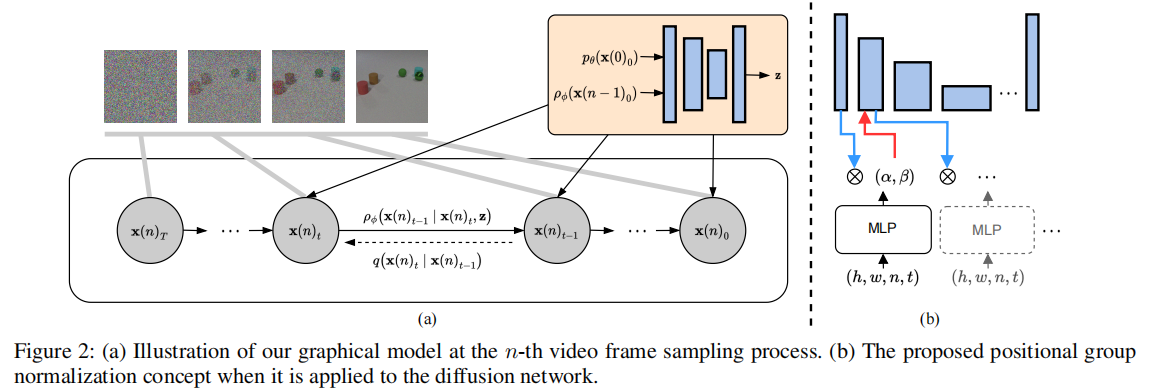
图 2:(a)第 n 帧采样过程的图形模型;(b)位置组归一化(PosGN)在扩散网络中的应用示意图
2.1 基础扩散模型:DDPM 的扩展
VIDM 基于去噪扩散概率模型(DDPM)构建,其核心是通过迭代去噪过程,将高斯噪声逐步映射为真实视频数据。DDPM 的核心公式如下:
- 加噪过程:将干净帧
逐步添加噪声,得到t时刻的含噪帧
:
其中
是噪声调度参数,
是高斯噪声。
- 去噪过程:通过网络
预测噪声
,并基于预测结果反向生成
:
VIDM 在 DDPM 基础上,针对视频生成场景进行了三项关键改进,解决了扩散模型在视频任务中的固有缺陷。
2.2 内容生成器:高质量初始帧的保障
内容生成器的目标是生成清晰、真实的第一帧(),为后续运动生成提供高质量基础。为提升生成质量,VIDM 引入两项优化策略:
(1)采样空间截断(Sampling Space Truncation)
扩散模型虽生成多样性高,但易出现物体质量差的问题。VIDM 借鉴 StyleGAN 的截断技巧,在每个扩散步骤中,将含噪帧与一个可学习常数c(维度与
一致)拼接,隐式限制噪声的采样空间。
- 改进后的去噪网络输入变为
,去噪公式更新为:
- 优势:无需修改网络结构,即可提升帧的细节质量,避免生成模糊或畸形的物体。
(2)鲁棒性惩罚(Robustness Penalty)
传统 DDPM 使用 Dropout 抑制过拟合,但 Dropout 的效果依赖数据集,且易损害模型通用性。VIDM 用Charbonnier 惩罚项替代 Dropout,修改损失函数为:其中
(实验验证该值最优)。
- 优势:保持损失函数可微性的同时,自适应抑制过拟合,提升内容生成的鲁棒性。
2.3 运动生成器:连贯视频的核心
运动生成器通过自回归方式生成后续帧(),核心是隐式建模帧间运动信息,确保视频的时空连续性。VIDM 为此设计了三项关键技术:
(1)位置组归一化(Positional Group Normalization, PosGN)
传统归一化方法(如 GroupNorm)忽略了视频的时空位置信息,导致模型无法捕捉帧间运动关联。PosGN 将 4D 时空坐标(h:高度,w:宽度,n:帧索引,t:扩散时间步)编码为调制参数,融入特征归一化过程:
- 通过 MLP(带正弦激活函数)将 4D 坐标映射为仿射参数
:
- 用
- 优势:借鉴隐式神经表示(INR)的坐标编码思想,让模型感知时空位置,为运动连续性建模提供基础。其计算成本与普通 AdaGN 接近,不增加过多负担。
(2)隐式运动条件(Implicit Motion Condition)
为精准捕捉帧间运动,VIDM 引入光流类隐式特征作为条件。具体步骤如下:
- 使用预训练的光流估计网络(SpyNet),计算初始帧
与前一帧
之间的隐式特征z:
- 将z作为运动生成器的条件,输入去噪网络
,损失函数变为:
- 优势:无需显式预测光流,通过隐式特征z编码运动信息,避免光流估计误差对生成结果的影响,同时确保帧间运动的连贯性。
(3)自适应特征残差(Adaptive Feature Residual)
为简化运动建模难度,VIDM 引入一个额外编码器,基于初始帧
与扩散时间步t生成内容特征残差r。运动生成器不再直接生成完整帧,而是学习生成 “残差 + 基础内容”,即:
- 优势:将复杂的帧生成任务拆解为 “基础内容 + 运动残差”,降低模型学习难度,提升运动建模的精准度。
2.4 VIDM 的完整流程
VIDM 的视频生成过程分为训练与推理两个阶段,核心流程由算法 1(运动学习)与算法 2(视频生成)定义:
算法 1:运动生成器训练流程
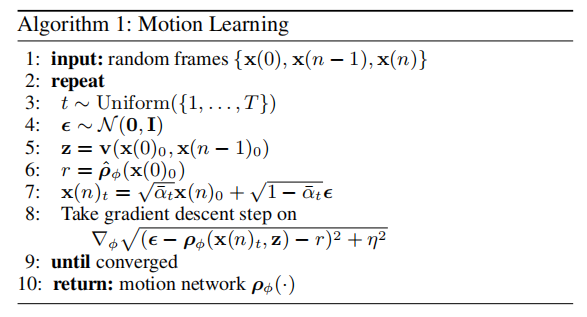
- 输入随机帧
(n为当前帧索引);
- 随机采样扩散时间步
与噪声
- 用 SpyNet 计算隐式运动特征
;
- 生成含噪帧
;
- 最小化损失
,更新运动生成器参数
。
算法 2:视频生成推理流程
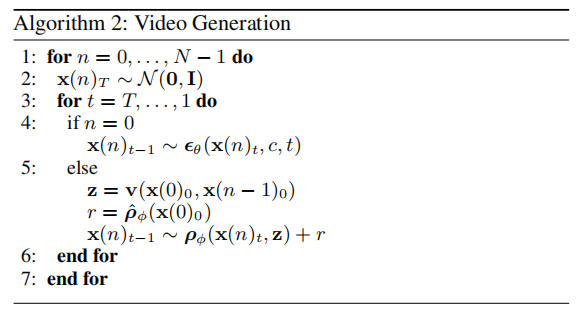
- 对每个帧索引
(N为总帧数):
- 若
(初始帧):用内容生成器从噪声
迭代去噪,得到
- 若
(后续帧):
- 计算隐式运动特征
- 从噪声
开始,用运动生成器
迭代去噪,结合残差r得到
;
- 计算隐式运动特征
- 若
- 拼接所有
三、实验验证:性能与消融分析
为验证 VIDM 的有效性,论文在 4 个主流视频数据集上进行了实验,对比当前 SOTA 方法,并通过消融实验分析核心组件的作用。
3.1 实验设置
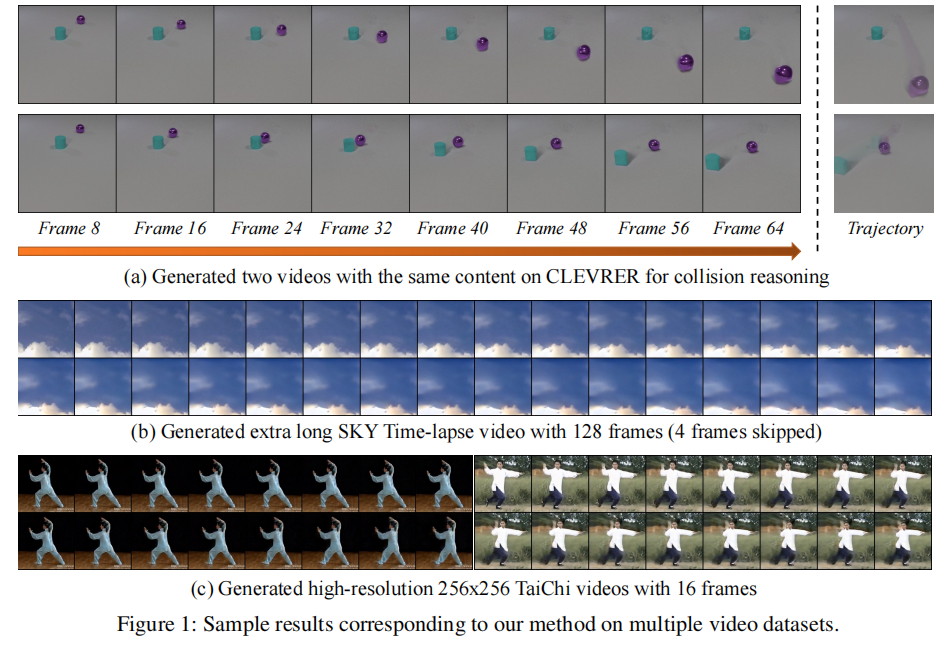
- 数据集:涵盖不同分辨率与运动类型的视频,包括:
- UCF-101(101 类人类动作,256×256 分辨率);
- TaiChi-HD(太极拳动作,128×128 分辨率);
- Sky Time-lapse(天空延时视频,256×256 分辨率);
- CLEVRER(合成物体交互视频,256×256 分辨率)。
- 评价指标:
- FVD(Fréchet Video Distance):衡量生成视频与真实视频的分布差异,值越小越好(核心指标);
- FID(Fréchet Inception Distance):衡量帧的空间质量,值越小越好;
- IS(Inception Score):衡量生成帧的多样性与真实性,值越大越好。
- 基线方法:包括 GAN-based 方法(MoCoGAN-HD、StyleGAN-V、DIGAN)、扩散模型(VDM)、Transformer 方法(TATS)等 12 种当前 SOTA。
3.2 主实验结果:超越 SOTA
(1)定量结果
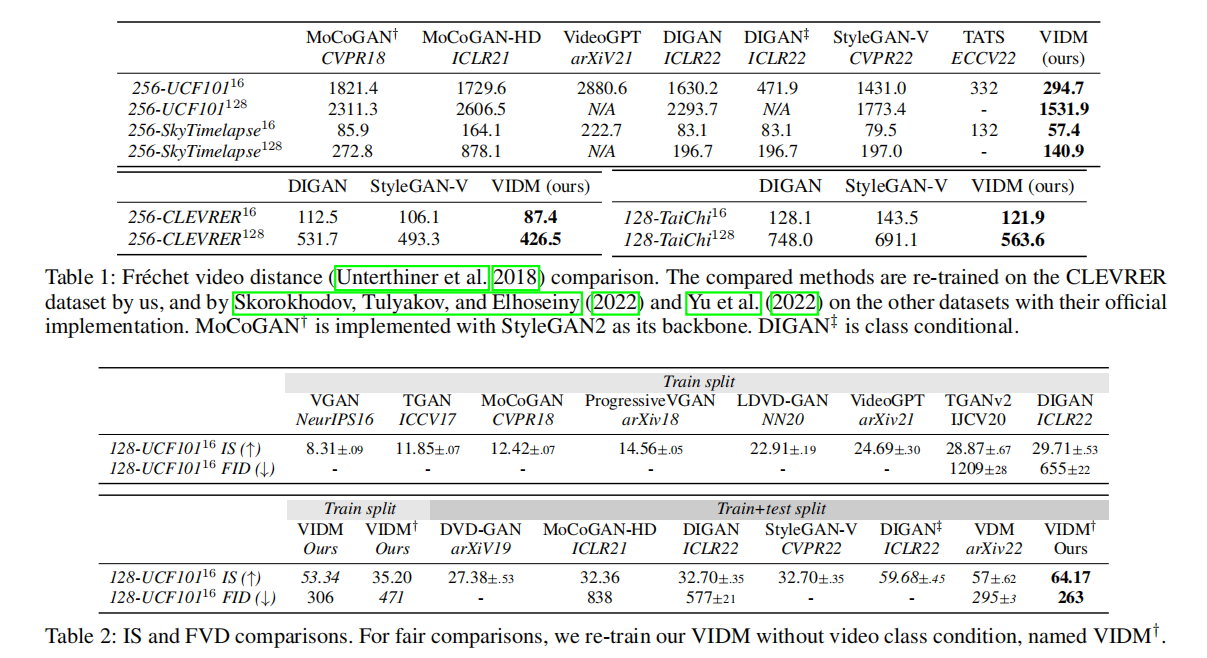
论文通过表 1 与表 2 展示了 VIDM 与基线方法的 FVD、IS、FID 对比,核心结论如下:
- 在所有数据集上,VIDM 的 FVD 值均显著低于基线方法。例如:
- 256×256 UCF-101(16 帧):VIDM 的 FVD 为 294.7,远低于 DIGAN 的 471.9 与 StyleGAN-V 的 1431.0;
- 256×256 Sky Time-lapse(16 帧):VIDM 的 FVD 为 57.4,优于 DIGAN 的 83.1 与 StyleGAN-V 的 79.5;
- 长视频任务(128 帧)中,VIDM 优势更明显。例如 256×256 CLEVRER(128 帧):VIDM 的 FVD 为 426.5,低于 DIGAN 的 531.7 与 StyleGAN-V 的 493.3。
- 空间质量指标(FID/IS)上,VIDM 同样表现优异。例如 128×128 UCF-101(16 帧):VIDM 的 IS 为 64.17,高于 DIGAN 的 59.68 与 VDM 的 57.0。
(2)定性结果
图 3 展示了 VIDM 与基线方法在 3 个数据集上的视觉对比,可见 VIDM 生成的视频:
- 帧内细节更清晰(如 UCF-101 中的人物动作、Sky Time-lapse 中的云层纹理);
- 帧间运动更连贯(如 TaiChi-HD 中的太极拳连贯动作),无明显跳变或静态帧问题。
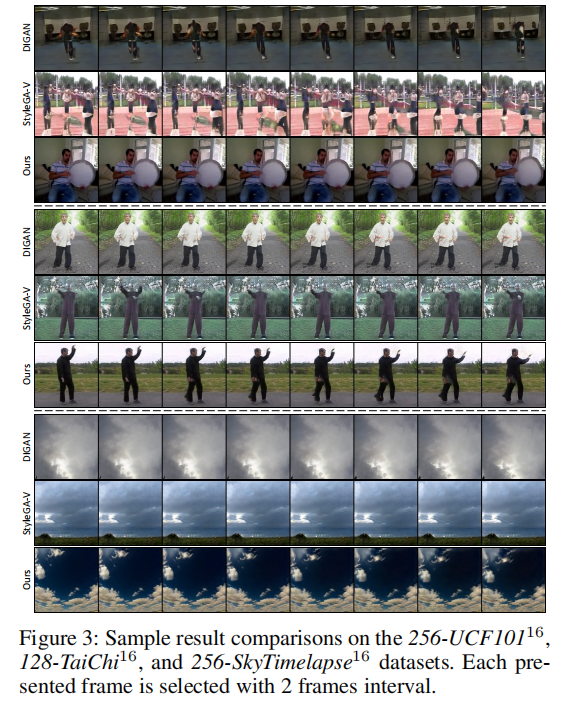
图 3:VIDM 与基线方法在 256-UCF101、128-TaiChi、256-Sky Time-lapse 数据集上的定性对比(每 2 帧展示 1 帧)
3.3 消融实验:核心组件的必要性
为验证内容生成器的 “采样空间截断”“鲁棒性惩罚” 与运动生成器的 “PosGN”“隐式运动条件” 的作用,论文设计了消融实验,结果如表 3 所示。
(1)内容生成器消融(表 3a)
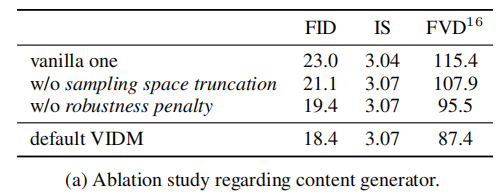
- 结论:移除 “采样空间截断” 或 “鲁棒性惩罚” 会导致 FID 升高、FVD 升高,证明两项优化均能提升内容生成质量,且共同作用时效果最优。
(2)运动生成器消融(表 3b)
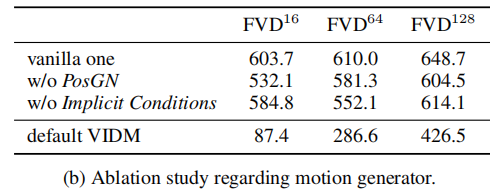
- 结论:
- 移除 PosGN 或隐式运动条件,FVD 显著升高,尤其在长视频(64 帧、128 帧)中,证明两项组件对运动连续性至关重要;
- 仅用 PosGN(无隐式条件):虽能生成不同帧,但运动不连贯;仅用隐式条件(无 PosGN):无法捕捉时空位置信息,生成静态帧序列;
- 图 4 展示了不同消融设置的 latent 特征与对应视频,直观证明完整 VIDM 的 latent 更稳定,生成视频更连贯。

图 4:不同消融设置下的 latent 特征可视化与对应生成视频帧对比
四、创新点与局限性
4.1 核心创新点
- 分离式内容 - 运动建模:首次在扩散模型中通过两个生成器分别建模内容与运动,简化视频生成的复杂度,同时提升帧质量与运动连续性。
- 隐式运动条件机制:基于光流类隐式特征而非显式光流,避免光流估计误差,精准编码帧间运动信息,为扩散模型提供有效的运动指导。
- PosGN 与优化策略:位置组归一化(PosGN)将时空坐标融入特征调制,结合采样空间截断、鲁棒性惩罚,解决了扩散模型在视频生成中的质量与过拟合问题。
4.2 局限性
- 计算效率低:扩散模型的迭代去噪过程(通常 T=1000 步)导致视频生成速度慢,尤其在高分辨率、长视频任务中,难以满足实时需求。
- 伦理风险:高质量视频生成能力可能被用于制作 Deepfake,带来虚假信息传播等社会问题(论文提及需配合 Deepfake 检测技术应对)。
五、总结与展望
VIDM 作为扩散模型在视频生成领域的重要探索,通过 “分离建模 + 隐式条件” 的思路,突破了传统方法在时空连续性建模上的瓶颈,为视频生成提供了新的技术范式。其核心贡献不仅在于提出了具体的模型架构,更在于验证了 “扩散模型 + 隐式条件” 在视频生成中的有效性,为后续研究提供了以下方向:
- 效率优化:通过减少扩散步数(如快速扩散)、模型压缩等方式,提升 VIDM 的生成速度;
- 多模态条件扩展:将文本、音频等模态作为条件,实现 “文本 - 视频”“音频 - 视频” 的跨模态生成;
- 更高分辨率与更长视频:进一步提升模型对超高清(4K/8K)、超长(1000 + 帧)视频的生成能力。
总体而言,VIDM 的工作为视频生成技术开辟了新的道路,其设计思想对扩散模型在其他时空数据(如 3D 点云、医学影像序列)上的应用也具有重要的借鉴意义。