无人机地面站中不同的飞行模式具体含义释义(开源飞控常用的5种模式)
无人机地面站中不同的飞行模式具体含义解释(开源飞控常用的5种模式)
针对使用开源协议的飞控,如apm、px4等,我们经常使用mission planner软件进行连接并设置参数,控制飞行,很多小伙伴在使用mp的过程中都会发现我们要控制飞机,都会涉及到无人机的模式切换,我们可以直接设置飞行模式,也可能在下发起飞命令、返航命令后会发现飞行模式会自动切换。
那么不同的飞行模式具体代表什么含义呢?在不同模式下无人机会进行怎样的飞行呢?接下来介绍一下最常见的5种飞行模式具体含义:
1、Stabilize,自稳模式
也被某些软件翻译为稳定模式,mavlink协议中该模式对应的base_mode值为0,是第一种飞行模式。
该模式的核心在于允许用户手动驾驶,但无人机会自动自我调平,自动调整姿态来保持稳定,所以叫自稳模式。
在该模式下飞手的摇杆操作输入可以控制无人机的倾斜角度。 当飞手释放摇杆时,无人机会停下来(悬停) 并且自动调平自身。
如果无人机被风吹动,吹走,那就需要飞手手动控制遥杆进行拉回,也就是说自稳模式只保持无人机自身稳定,而不自动校正无人机的绝对经纬度、高度位置。
飞手的油门输入可以控制平均电机速度,从而控制高度,因为自稳模式不保持无人机的绝对位置和高度,所以需要飞手不断调整油门来维持高度不变。如果飞手将油门完全放下,这个时候电机 将达到它的最低速率(MOT_SPIN_ARMED),如果无人机在飞行时,它会失去控制,可能翻滚。如果想在油门拉到最低的情况下维持无人机的稳定,可以设置成空中模式airMode,如果想松开摇杆(此时摇杆默认位于中间,也就是50%油门的位置)仍保持高度、姿态稳定,那就可以设置为定高模式。
2、Altitude Hold Mode,定高模式
定高模式下,摇杆对无人机俯仰、横滚、偏航的控制和自稳模式下一样,飞手可以同样操控无人机,不一样的是当油门遥杆位于40%-60%的位置时,无人机的高度将自动保持在当前绝对高度。
当油门摇杆低于40%或者高于60%时,无人机将进行上升或者下降运动,摇杆拉到底,也就是0%的位置时,无人机将以2.5m/s的速度下降,摇杆拉到100%时,无人机将以2.5m/s的速度上升,这个2.5m/s这个参数可以通过PILOT_SPEED_UP和PILOT_SPEED_DN这两个参数来调整,用于建立这些速度的加速度由PILOT_ACCEL_Z设置。
这里的40%-60%这个区间值的大小由THR_DZ参数进行调整,此参数的值应介于“0”和 “400”之间,“0”表示没有这个区间,100表示在油门50%的基础上上下留出10%,400则表示上下40%,也就是10%-90%。
3、Loiter Mode,悬停模式
也叫徘徊模式,此模式下无人机会自动尝试保持当前位置、航向和高度。飞手可以在这个模式下和自稳、定高模式一样控制无人机,但当松开摇杆时,无人机将自动减速到悬停状态,并保持绝对位置。
该飞行模式有一些参数可以配置:
LOIT_SPEED:最大水平速度,单位为 cm/s(即 1250 = 12.5m/s)
LOIT_ACC_MAX:最大加速度,单位为 cm/s/s。较高的值会导致直升机加速和停止得更快
LOIT_ANG_MAX:最大倾斜角,以度为单位(即 30 度)。默认情况下,此值为零,这会导致使用PSC_ANGLE_MAX或ANGLE_MAX参数的值
LOIT_BRK_ACCEL:制动时的最大加速度,以厘米/秒为单位(即飞行员已将纵杆移至中心)。较高的值将更快地停止车辆
LOIT_BRK_DELAY:飞行员将纵杆居中后制动开始前的延迟(以秒为单位)
LOIT_BRK_JERK:制动时加速度的最大变化(以厘米/秒/秒为单位)。数字越高,车辆越快达到最大制动角度,数字越低,制动越平稳
PSC_POSXY_P:(在上面屏幕截图的右上角显示为“位置 XY(距离与速度)”)将水平位置误差(即所需位置与实际位置之间的差值)转换为朝向目标位置所需的速度。一般不需要调整
PSC_VELXY_P(显示为“速度 XY(速度到加速度)”)将朝向目标的所需速度转换为所需的加速度。由此产生的所需加速度变成一个倾斜角,然后将其传递到稳定模式使用的相同角度控制器。一般不需要调整
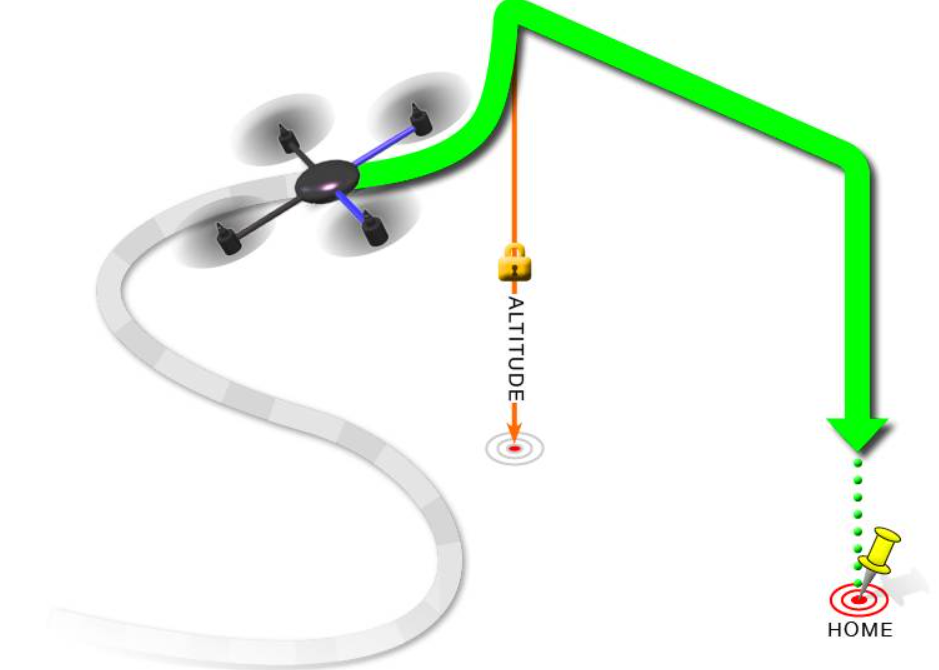
4、RTL Mode,返航模式
返航模式就是自动返回到起飞点的一个模式,它实际上更像是一个功能,切换到返航模式,无人机即自动返回的起始点。
注意,这里的返航是直线返航,直接飞往起始点。这里就存在一个安全隐患,也就是这条直线上可能存在障碍物,解决方案就是将无人机抬升到一定高度,达到超越所有障碍物的高度为止,再进行返航,这个高度参数是 RTL_CLIMB_MIN或RTL_ALT,以较高者为准,RTL_ALT的默认值为15m,飞至起飞点经纬度位置,再降低高度直至着陆,如图:
5、Auto Mode,自动模式
自动模式下无人机将自动按照预存储在飞控中的脚本命令执行飞行,我们可以做好航线规划,设置好航点及相应动作参数后,将航线上传到飞控当中,切换到自动模式,无人机将自动执行这条航线。
自动模式在每个航点之间以直线导航,当它接近每个航点时,沿着平滑的弯曲路径到达下一个航点(S 曲线)。它控制路径在接近航点时位于每个航点的WPNAV_RADIUS内。根据需要将速度降低到 WPNAV_SPEED 以下,以将无人机保持在配置的加速度限制(WPNAV_ACCEL 和 WPNAV_ACCEL_C 范围内)。
如果航点之后的下一个任务命令不是正常航点(例如 LAND、LOITER_TURNS、RTL 等),则不会发生这种平滑弯曲的路径,因为它将改变方向到下一个航点。在这些情况下,无人机将接近航路点,停下来,然后前往下一个导航航路点,而不是在它前面平滑弯曲并前往下一个导航航路点。
此外,较小的WPNAV_RADIUS值将要求曲线非常小,实际上看起来就像上面解释的非 S 曲线行为一样。
注意一般航线规划的第一个航点也就是第一个命令一般是起飞,否则这条航线就要在手动起飞后再切换任务模式才能起飞。
mission planner中提供了一共25种飞行模式,其中无人机一般用到的有10种,以上5种为最常用的,除此之外还有降落模式、盘旋模式、定点模式、刹车模式等,将在下一期文章中进行介绍。