基于3D LiDAR的作物排检,用于在不同种植密度下成熟时的大豆
3D LiDAR-based crop row detection for soybean at maturity under different planting densities
--------------------------------------------------------------------------------------------------------------------------
研究背景:作物排检对农业自动化意义重大,但成熟大豆因树冠封闭、种植密度差异大等,使得传统基于图像的检测受环境影响大,激光雷达作为主动传感器,受环境照明影响小,能生成高精度三位点云,在农业领域优势明显,不过现有基于激光雷达的方法在成熟大豆研究有效,且忽视种植密度影响,存在假作物排、检测缺口等问题
研究思路:针对成熟大豆田作物排检的挑战,提出基于3D激光雷达的新型感知系统,假设适应局部点云密度的聚类策略,生物启发的树冠提取技术及伪排抑制与缺失树冠完成机制结合,能提升检测精度与稳定性,进而开发算法并验证其有效性
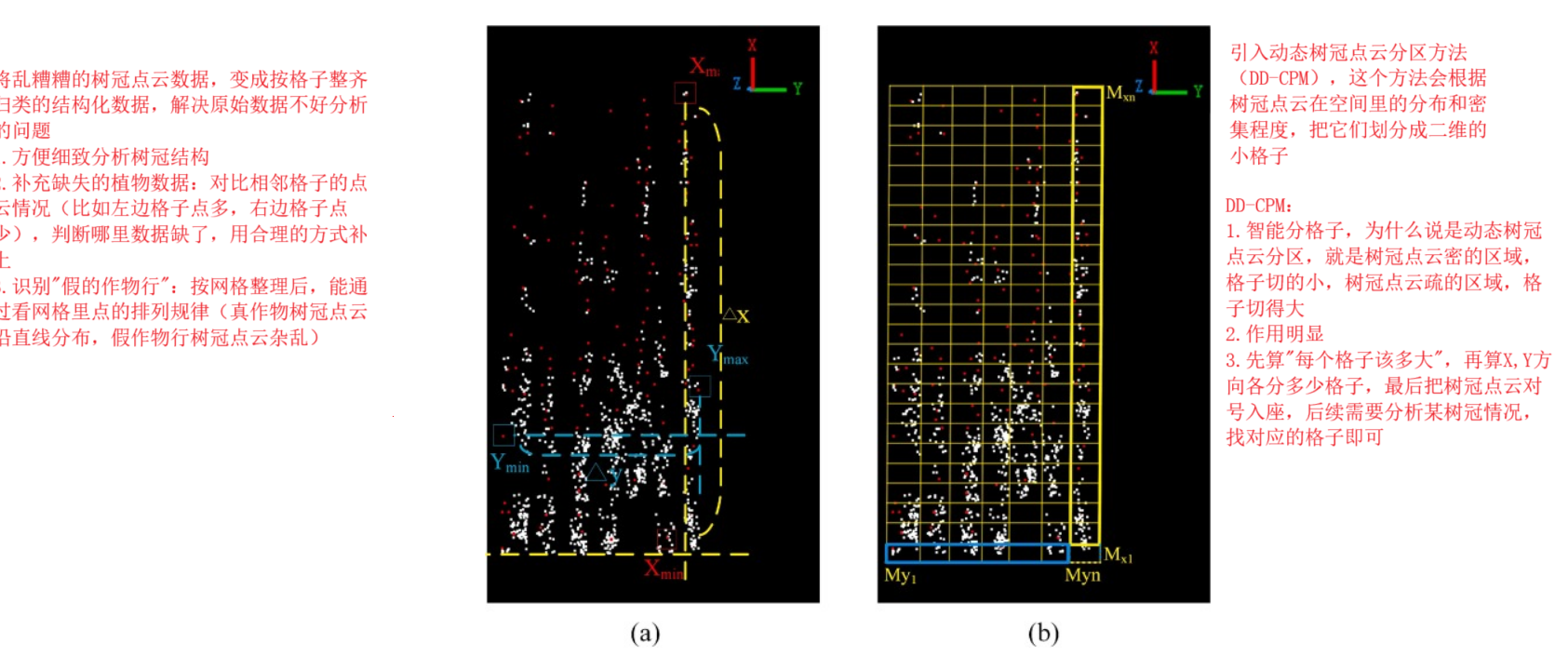
研究方法:采用3D激光雷达采集点云数据,引入主干法(MSM)精确提取树冠中心,结合动态云层点云分区(DD-CPM)方法动态建模作物行、重构缺失植物数据并识别伪排作物,最后通过与手动注释的地面真理数据比较验证方法
种植密度对检测的影响:
(1)低密度区域:行间间距宽,作物行边界更清晰,利于提取作物排,但行间间隙大,容易把间隙误判成假的作物排
(2)高密度区域:树冠连续且重叠多,单个作物行的算法难区分,而且杂草干扰、树冠合并容易导致把错误的行分类,影响检测准确性
激光雷达检测不同种植密度作物行算法流程
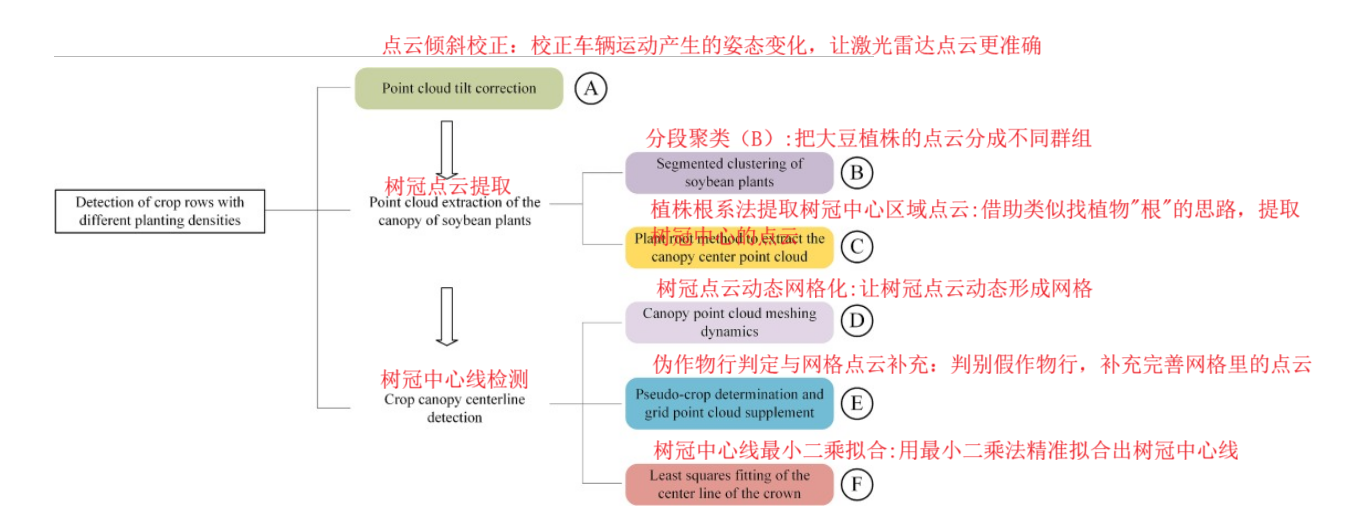
1.LiDAR与IMU集成解决点云倾斜问题
农用机械在不平的田地里走的时候,会颠簸、倾斜,这就导致激光雷达扫出来的"点云"(代表作物的小点组成的图像)也跟着歪七扭八
这时候IMU(惯性测量单元)就像一个"角度检测器",能实时测出机械滚动、俯仰的角度,通过特定数学公式,把这些歪扭的点云,根据IMU测的角度,调整成稳定、水平的样子,方便后续的处理

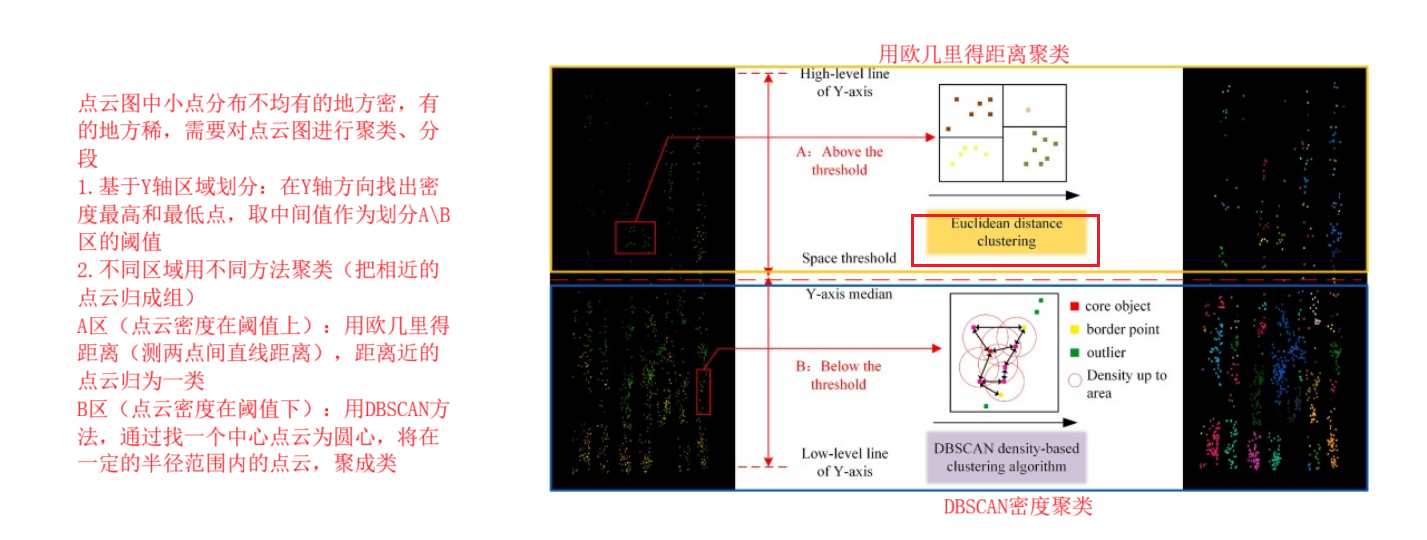
2.点云细分聚类
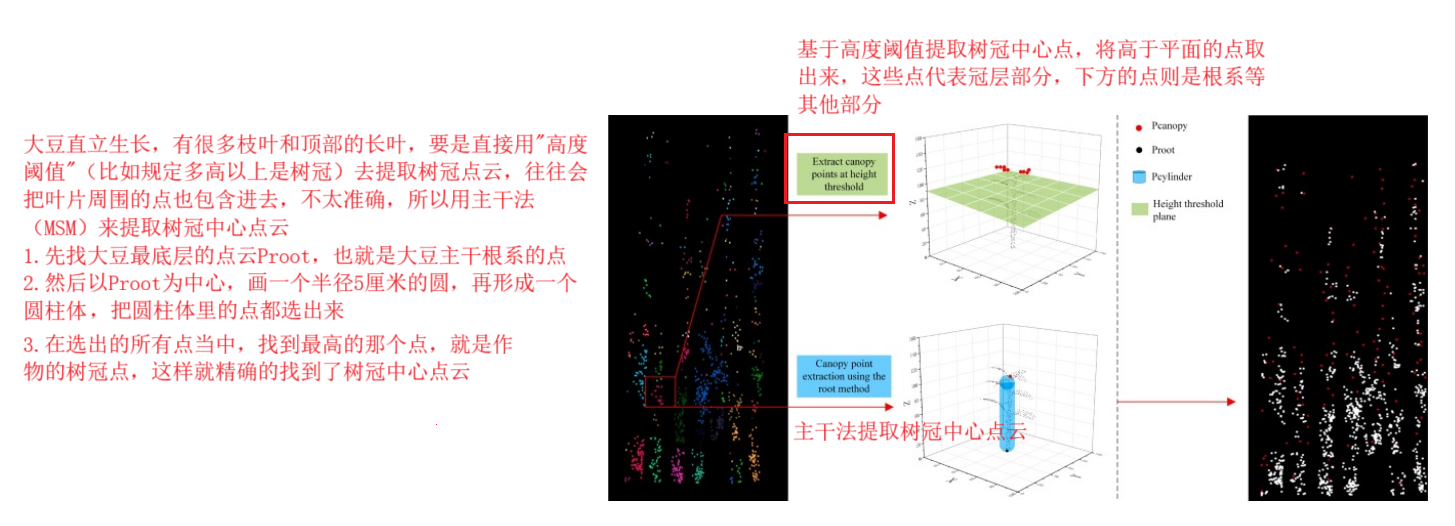
3.主干法提取树冠中心点云
4.树冠的点云数据划分网格
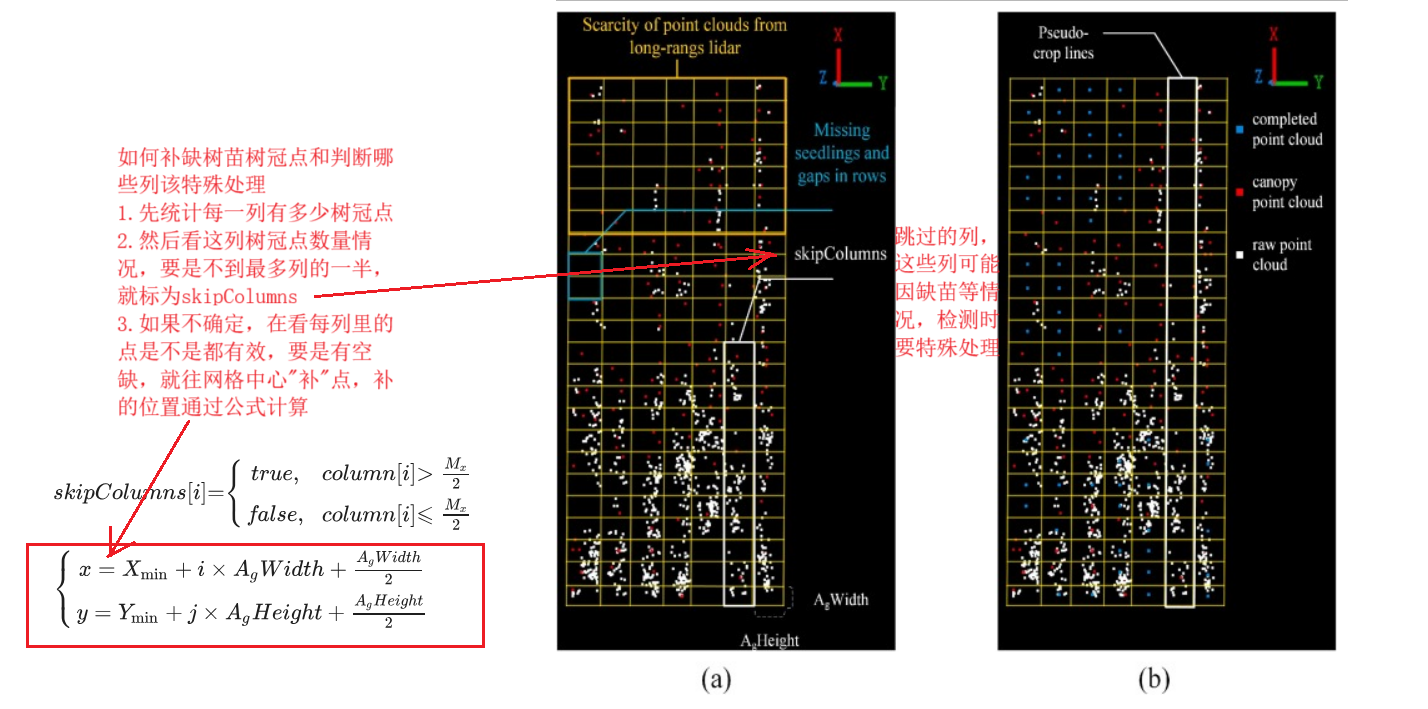
5.缺失的树苗树冠点完成和伪作物排测定
用激光雷达(LiDAR)去扫描这些作物,容易出现问题:
1.杂草会被误认成作物,形成"伪作物线"
2.激光雷达看远处时,因为云层稀,小作物容易被漏掉
3.作物本身也可能长不好,比如缺苗、排列断了
为了避免认错,就得先找到缺的树苗"树冠点",还要搞清楚"伪作物"的排列
6.作物树冠中心线检测
找到中心线(一排作物的中线),用线性模型+最小平方法(LSM)计算
线性模型是y=Kx+b
最小平方法,就是一列的树冠点云到这条直线的"误差"最小,这样就能算出最贴合作物排列的直线,也就是"树冠中心线"
总结:
1.引入动态树冠点云区分法(DD-CPM),可适应树冠点云的空间分布和密度特性,对树冠结构进行详细局部分析,为补充缺失植物数据和识别伪作物行提供基础
2.提出主干法(MSM)提取树冠中心点云,针对大豆直立生长特性,解决了因大豆枝叶和长叶顶部导致直接用高度阈值提取树冠点云围绕叶片的问题,提高了树冠点云提取的准确性