《小白学随机过程》第二章:随机过程——常见的随机过程(线性高斯过程和卡尔曼滤波)
本文首先讲解了什么是高斯过程,这是一类随机过程的统称。在实际应用上,有多种随机过程都属于高斯过程,作为第二章的开篇,本章主要讲解了线性高斯过程,本章涉及以下要点:
- 按照时间是否连续、状态是否连续,对随机过程进行分类
- 对随机变量和随机过程标准化的数学定义
- 提供了一个高斯过程(通用)的仿真代码实现和示例图
- 阐述动态系统和随机过程的关系,以及什么是线性高斯动态系统
- 引出卡尔曼滤波,其状态方程描述的就是一个离散的线性高斯过程组成的动态序列
- 说明卡尔曼滤波状态公式 u t u_t ut的作用
- 提供了一个2D空间上的具体例子
- 提供了一个python仿真代码和示意图,说明线性高斯过程的建模过程(这也是进一步学习卡尔曼滤波的前提)
随机过程是描述随时间(或空间)演化的随机现象的数学模型。根据时间指标集 T T T 和状态空间 S S S 的性质,以及过程的统计特性,常见的随机过程可分为以下几类:
一、按时间与状态空间分类
| 类型 | 时间指标集 T T T | 状态空间 S S S | 典型例子 |
|---|---|---|---|
| 离散时间 + 离散状态 | N \mathbb{N} N 或 { 0 , 1 , 2 , … } \{0,1,2,\dots\} {0,1,2,…} | 有限或可数集(如 Z \mathbb{Z} Z) | 马尔可夫链、随机游走 |
| 离散时间 + 连续状态 | N \mathbb{N} N | R d \mathbb{R}^d Rd | ARMA 时间序列、GARCH 模型 |
| 连续时间 + 离散状态 | [ 0 , ∞ ) [0, \infty) [0,∞) | 有限或可数集 | 泊松过程、生灭过程 |
| 连续时间 + 连续状态 | [ 0 , ∞ ) [0, \infty) [0,∞) | R d \mathbb{R}^d Rd | 布朗运动、Ornstein-Uhlenbeck 过程 |
二、经典随机过程详解
1. 高斯过程(Gaussian Process, GP)
1.1 定义
一个随机过程 { X ( t ) } t ∈ T \{X(t)\}_{t \in T} {X(t)}t∈T 称为高斯过程,如果对任意有限个时间点 t 1 , … , t n ∈ T t_1, \dots, t_n \in T t1,…,tn∈T,随机向量 ( X ( t 1 ) , … , X ( t n ) ) (X(t_1), \dots, X(t_n)) (X(t1),…,X(tn)) 服从多元正态分布。
✅ 高斯过程完全由其均值函数和协方差函数决定:
- 均值函数: m ( t ) = E [ X ( t ) ] m(t) = \mathbb{E}[X(t)] m(t)=E[X(t)]
- 协方差函数(核函数): k ( t , s ) = Cov ( X ( t ) , X ( s ) ) k(t, s) = \text{Cov}(X(t), X(s)) k(t,s)=Cov(X(t),X(s))
1.2 示例和图示、代码
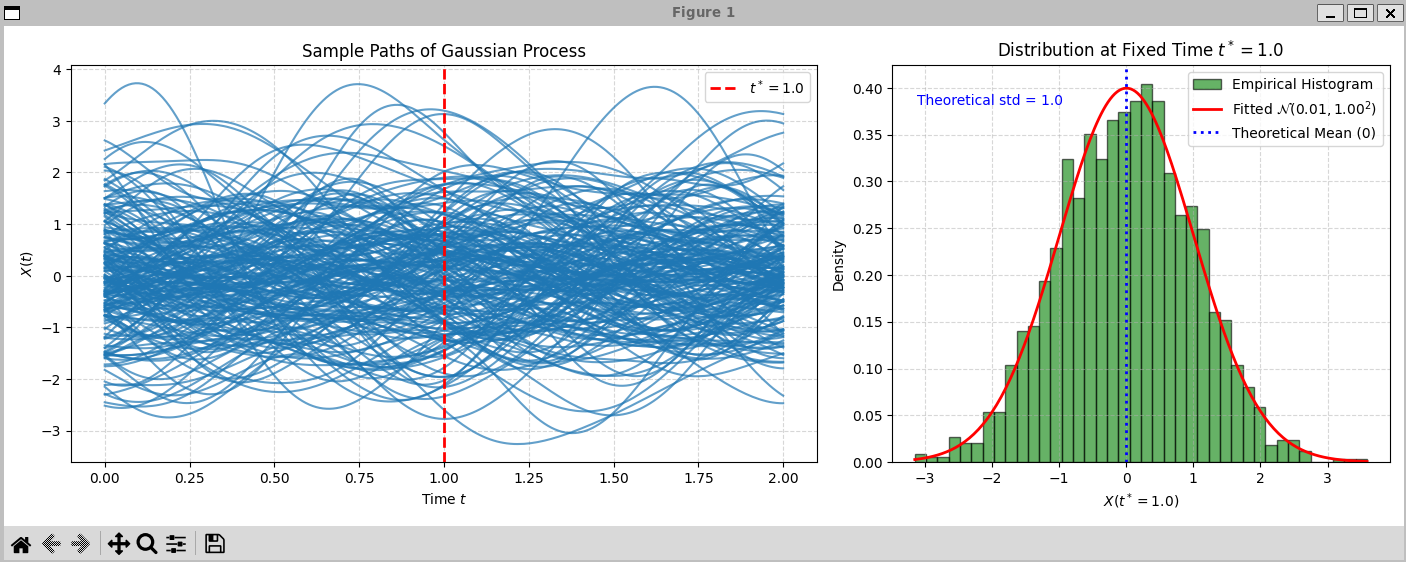
下面我们将定义一个具体的高斯过程(Gaussian Process, GP),写出其均值函数和协方差函数(核函数),使用 Python(NumPy + Matplotlib)从该 GP 中采样 N 条轨迹并可视化。
我们选择一个经典且常用的高斯过程:
-
均值函数: m ( t ) = 0 m(t) = 0 m(t)=0
-
协方差函数(RBF 核 / Squared Exponential Kernel):
k ( t , t ′ ) = σ 2 exp ( − ( t − t ′ ) 2 2 ℓ 2 ) k(t, t') = \sigma^2 \exp\left( -\frac{(t - t')^2}{2\ell^2} \right) k(t,t′)=σ2exp(−2ℓ2(t−t′)2)
其中: -
σ 2 = 1.0 \sigma^2 = 1.0 σ2=1.0:信号方差(控制幅度)
-
ℓ = 0.5 \ell = 0.5 ℓ=0.5:长度尺度(控制平滑性, ℓ \ell ℓ 越小,函数越“抖”)
📌 这个 GP 生成的样本函数是无限可微、非常平滑的随机曲线。
- Python 实现:采样 N 条轨迹。高斯过程在有限个点 t 1 , … , t n t_1, \dots, t_n t1,…,tn 上的联合分布为:
f = [ f ( t 1 ) , … , f ( t n ) ] ⊤ ∼ N ( 0 , K ) \mathbf{f} = [f(t_1), \dots, f(t_n)]^\top \sim \mathcal{N}(\mathbf{0}, \mathbf{K}) f=[f(t1),…,f(tn)]⊤∼N(0,K)
其中 K i j = k ( t i , t j ) \mathbf{K}_{ij} = k(t_i, t_j) Kij=k(ti,tj)。我们通过 Cholesky 分解或特征值分解从该多元正态分布中采样。代码:
import numpy as np
import matplotlib.pyplot as plt
from scipy.stats import norm# ----------------------------
# 1. 设置高斯过程参数
# ----------------------------
T = np.linspace(0, 2, 200) # 时间网格 [0, 2],200 个点
t_star = 1.0 # 固定时刻 t*
t_star_idx = np.argmin(np.abs(T - t_star)) # 找到最接近的索引n_trajectories = 200 # 轨迹数量(用于可视化)
n_samples_hist = 2000 # 用于直方图的采样次数(越多越平滑)sigma = 1.0 # 信号标准差
ell = 0.3 # 长度尺度(控制平滑性)# ----------------------------
# 2. 构建协方差矩阵 (RBF 核)
# ----------------------------
T1, T2 = np.meshgrid(T, T)
K = sigma**2 * np.exp(-0.5 * (T1 - T2)**2 / ell**2)
K += 1e-8 * np.eye(len(T)) # 数值稳定性# Cholesky 分解
L = np.linalg.cholesky(K)# ----------------------------
# 3. 采样轨迹(用于绘图)
# ----------------------------
trajectories = []
for _ in range(n_trajectories):z = np.random.randn(len(T))f = L @ ztrajectories.append(f)# ----------------------------
# 4. 采样大量样本用于直方图(仅需 t_star 处的值)
# ----------------------------
samples_at_t_star = []
for _ in range(n_samples_hist):z = np.random.randn(len(T))f = L @ zsamples_at_t_star.append(f[t_star_idx])samples_at_t_star = np.array(samples_at_t_star)# ----------------------------
# 5. 绘图:轨迹 + 直方图
# ----------------------------
fig, axs = plt.subplots(1, 2, figsize=(14, 5), gridspec_kw={'width_ratios': [3, 2]})# --- 左图:随机过程轨迹 ---
for f in trajectories:axs[0].plot(T, f, color='C0', alpha=0.7)
axs[0].axvline(x=t_star, color='red', linestyle='--', linewidth=2, label=f'$t^* = {t_star}$')
axs[0].set_xlabel('Time $t$')
axs[0].set_ylabel('$X(t)$')
axs[0].set_title('Sample Paths of Gaussian Process')
axs[0].grid(True, linestyle='--', alpha=0.5)
axs[0].legend()# --- 右图:固定时刻 t* 的分布 ---
counts, bins, patches = axs[1].hist(samples_at_t_star, bins=40, density=True,alpha=0.6, color='green', edgecolor='black', label='Empirical Histogram'
)# 拟合正态分布
mu_emp = np.mean(samples_at_t_star)
sigma_emp = np.std(samples_at_t_star)
x = np.linspace(bins[0], bins[-1], 200)
pdf = norm.pdf(x, mu_emp, sigma_emp)
axs[1].plot(x, pdf, 'r-', linewidth=2, label=f'Fitted $\mathcal{{N}}({mu_emp:.2f}, {sigma_emp:.2f}^2)$')# 理论均值与方差(GP 在 t* 处的边际分布)
# 对于零均值 GP,X(t*) ~ N(0, k(t*, t*)) = N(0, sigma^2)
theoretical_std = sigma # 因为 RBF 核在 t=t' 时为 sigma^2
axs[1].axvline(x=0, color='blue', linestyle=':', linewidth=2, label='Theoretical Mean (0)')
axs[1].text(0.05, 0.9, f'Theoretical std = {theoretical_std}', transform=axs[1].transAxes, color='blue')axs[1].set_xlabel(f'$X(t^*={t_star})$')
axs[1].set_ylabel('Density')
axs[1].set_title(f'Distribution at Fixed Time $t^* = {t_star}$')
axs[1].legend()
axs[1].grid(True, linestyle='--', alpha=0.5)plt.tight_layout()
plt.show()
执行效果如下所示(其中左边采样了200条轨迹进行显示,右图采样了2000条轨迹并固定时间统计直方图):
2. 线性高斯过程(Liner Gaussian Process, LGP)
1.1 前置知识
建议首先了解控制理论中线性动态系统的状态空间表示方法,对理解线性高斯过程非常有帮助,参考:线性高斯系统的含义
1.2 定义
线性高斯过程(Linear Gaussian Process)是指一类由线性动态系统驱动、且所有噪声服从高斯分布的随机过程。它本质上是线性高斯状态空间模型(Linear Gaussian State-Space Model)中状态序列 x t {x_t} xt 所构成的随机过程。其状态序列既是马尔可夫过程,又是高斯过程,广泛应用于滤波、控制、信号处理和经济建模等领域。
线性高斯过程是高斯过程,高斯过程不一定是线性高斯过程。
1.3 核心特征
- 线性:状态演化由线性方程描述;
- 高斯:初始状态和过程/观测噪声均为高斯分布;
- 马尔可夫性:当前状态仅依赖前一状态;
- 可解析推断:可用卡尔曼滤波(Kalman Filter)进行最优状态估计。
1.4 数学化表述
- 状态方程(系统动态)
x t = F t x t − 1 + B t u t + w t , w t ∼ N ( 0 , Q t ) \mathbf{x}_t = \mathbf{F}_t \mathbf{x}_{t-1} + \mathbf{B}_t \mathbf{u}_t + \mathbf{w}_t, \quad \mathbf{w}_t \sim \mathcal{N}(0, \mathbf{Q}_t) xt=Ftxt−1+Btut+wt,wt∼N(0,Qt) - 观测方程(可选,用于滤波)
z t = H t x t + v t , v t ∼ N ( 0 , R t ) \mathbf{z}_t = \mathbf{H}_t \mathbf{x}_t + \mathbf{v}_t, \quad \mathbf{v}_t \sim \mathcal{N}(0, \mathbf{R}_t) zt=Htxt+vt,vt∼N(0,Rt)
其中:- x t \mathbf{x}_t xt:隐藏状态(如位置、速度、温度等);
- F t \mathbf{F}_t Ft:状态转移矩阵(线性动态);
- B t \mathbf{B}_t Bt:控制输入矩阵;
- u t \mathbf{u}_t ut:已知控制输入(如加速度指令、政策干预);
- w t , v t \mathbf{w}_t, \mathbf{v}_t wt,vt:高斯过程噪声和观测噪声;
- H t \mathbf{H}_t Ht:观测矩阵。
🔑 关键结论:由于线性变换 + 高斯噪声 ⇒ 高斯分布,因此任意有限个时刻的状态 ( x t 1 , … , x t n ) (\mathbf{x}_{t_1}, \ldots, \mathbf{x}_{t_n}) (xt1,…,xtn) 的联合分布是多元正态分布,故 { x t } \{\mathbf{x}_t\} {xt} 是一个高斯过程(在离散时间、有限维意义上)。
1.5 例子
在雷达目标跟踪系统中,线性高斯随机过程被广泛用于建模目标的运动状态(如位置、速度)及其受噪声干扰的观测。下面以 2D 平面中 N N N 个匀速运动目标 为例,给出完整的状态空间模型,并提供 Python 动态模拟代码。
- 状态空间模型(线性高斯过程):我们采用恒定速度模型(Constant Velocity, CV):
x t = [ x t x ˙ t y t y ˙ t ] (位置 x , y + 速度 x ˙ , y ˙ ) \mathbf{x}_t = \begin{bmatrix} x_t \\ \dot{x}_t \\ y_t \\ \dot{y}_t \end{bmatrix} \quad \text{(位置 } x,y \text{ + 速度 } \dot{x}, \dot{y} \text{)} xt= xtx˙tyty˙t (位置 x,y + 速度 x˙,y˙) - 状态方程
x t = F x t − 1 + w t , w t ∼ N ( 0 , Q ) \mathbf{x}_t = \mathbf{F} \mathbf{x}_{t-1} + \mathbf{w}_t, \quad \mathbf{w}_t \sim \mathcal{N}(\mathbf{0}, \mathbf{Q}) xt=Fxt−1+wt,wt∼N(0,Q)
其中状态转移矩阵(时间步长 Δ t \Delta t Δt):
F = [ 1 Δ t 0 0 0 1 0 0 0 0 1 Δ t 0 0 0 1 ] \mathbf{F} = \begin{bmatrix} 1 & \Delta t & 0 & 0 \\ 0 & 1 & 0 & 0 \\ 0 & 0 & 1 & \Delta t \\ 0 & 0 & 0 & 1 \end{bmatrix} F= 1000Δt100001000Δt1
过程噪声协方差(假设加速度扰动是白噪声,且各向同性):
Q = q ⋅ [ Δ t 4 4 Δ t 3 2 0 0 Δ t 3 2 Δ t 2 0 0 0 0 Δ t 4 4 Δ t 3 2 0 0 Δ t 3 2 Δ t 2 ] \mathbf{Q} = q \cdot \begin{bmatrix} \frac{\Delta t^4}{4} & \frac{\Delta t^3}{2} & 0 & 0 \\ \frac{\Delta t^3}{2} & \Delta t^2 & 0 & 0 \\ 0 & 0 & \frac{\Delta t^4}{4} & \frac{\Delta t^3}{2} \\ 0 & 0 & \frac{\Delta t^3}{2} & \Delta t^2 \end{bmatrix} Q=q⋅ 4Δt42Δt3002Δt3Δt200004Δt42Δt3002Δt3Δt2
其中 q q q 是过程噪声强度。
Q Q Q模拟了模型未捕捉到的动态扰动,如:加速度突变,风力干扰,路面不平等原因
注意看:右边矩阵中出现了 Δ t 4 \Delta t^4 Δt4 Δ t 3 \Delta t^3 Δt3 Δ t 2 \Delta t^2 Δt2等结构,这些幂次不是随意设定的,来源于对加速度白噪声的积分,并结合了状态转移方程的线性结构。具体来说:
- 假设系统受到加速度为高斯白噪声的扰动;
- 通过连续时间随机微分方程(SDE) 推导出离散化后的过程噪声协方差;
- 利用积分公式和期望运算,最终得到包含 Δ t 4 \Delta t^4 Δt4 Δ t 3 \Delta t^3 Δt3 Δ t 2 \Delta t^2 Δt2的 Q Q Q
- 详细推导涉及随机微分方程等知识,在此不再详细展开,读者根据需求可查阅相关资料。
- 观测方程
雷达通常测量位置(可能还有速度,但这里简化为仅位置):
z t = H x t + v t , v t ∼ N ( 0 , R ) \mathbf{z}_t = \mathbf{H} \mathbf{x}_t + \mathbf{v}_t, \quad \mathbf{v}_t \sim \mathcal{N}(\mathbf{0}, \mathbf{R}) zt=Hxt+vt,vt∼N(0,R)
观测矩阵:
H = [ 1 0 0 0 0 0 1 0 ] \mathbf{H} = \begin{bmatrix} 1 & 0 & 0 & 0 \\ 0 & 0 & 1 & 0 \end{bmatrix} H=[10000100]
观测噪声协方差(例如):
R = [ σ x 2 0 0 σ y 2 ] \mathbf{R} = \begin{bmatrix} \sigma_x^2 & 0 \\ 0 & \sigma_y^2 \end{bmatrix} R=[σx200σy2]
1.6 python代码
以下代码模拟 N N N 个目标 在 2 D 2D 2D 平面中匀速运动,受过程噪声扰动,并生成带观测噪声的雷达测量。使用 matplotlib.animation 实现动态可视化。(本模拟仅展示真实轨迹 + 带噪观测,不实现卡尔曼滤波(仅建模线性高斯过程本身))
import numpy as np
import matplotlib.pyplot as plt
import matplotlib.patches as patches
from matplotlib.animation import FuncAnimation# ----------------------------
# 参数设置
# ----------------------------
np.random.seed(42) # 可复现N = 5 # 目标数量
T = 200 # 时间步数
dt = 0.1 # 时间步长 (秒)# 过程噪声强度
q = 0.1
# 观测噪声标准差
sigma_x = 0.5
sigma_y = 0.5# 状态转移矩阵 F (4x4)
F = np.array([[1, dt, 0, 0],[0, 1, 0, 0],[0, 0, 1, dt],[0, 0, 0, 1]
])# 过程噪声协方差 Q (4x4)
Q_base = np.array([[dt**4/4, dt**3/2],[dt**3/2, dt**2 ]
])
Q = q * np.block([[Q_base, np.zeros((2,2))],[np.zeros((2,2)), Q_base]
])# 观测矩阵 H (2x4)
H = np.array([[1, 0, 0, 0],[0, 0, 1, 0]
])# 观测噪声协方差 R (2x2)
R = np.diag([sigma_x**2, sigma_y**2])# ----------------------------
# 初始化 N 个目标
# ----------------------------
# 每个目标状态: [x, vx, y, vy]
states = []
# 随机初始化位置(在 [-10, 10] 范围内)和速度(在 [-2, 2] 范围内)
for _ in range(N):x0 = np.random.uniform(-10, 10)y0 = np.random.uniform(-10, 10)vx0 = np.random.uniform(-2, 2)vy0 = np.random.uniform(-2, 2)states.append(np.array([x0, vx0, y0, vy0]))# 存储历史轨迹(用于绘制)
history = [[] for _ in range(N)] # history[i] = [(x0,y0), (x1,y1), ...]
observations = [[] for _ in range(N)] # 带噪观测# ----------------------------
# 模拟运动
# ----------------------------
for t in range(T):for i in range(N):# 添加过程噪声w = np.random.multivariate_normal(mean=np.zeros(4), cov=Q)states[i] = F @ states[i] + w# 记录真实位置x_true, y_true = states[i][0], states[i][2]history[i].append((x_true, y_true))# 生成带噪观测v = np.random.multivariate_normal(mean=np.zeros(2), cov=R)z = H @ states[i] + vobservations[i].append((z[0], z[1]))# 转换为 numpy 数组便于绘图
history = [np.array(traj) for traj in history]
observations = [np.array(obs) for obs in observations]# ----------------------------
# 动态可视化
# ----------------------------
fig, ax = plt.subplots(figsize=(10, 8))
ax.set_xlim(-15, 15)
ax.set_ylim(-15, 15)
ax.set_xlabel('X')
ax.set_ylabel('Y')
ax.set_title('2D Radar Multi-Target Tracking Simulation\n(Linear Gaussian Process)')
ax.grid(True, linestyle='--', alpha=0.5)# 为每个目标创建图形元素
rects = []
trails = []
obs_points = []colors = plt.cm.tab10(np.linspace(0, 1, N))for i in range(N):# 小矩形框表示目标(宽高 0.6)rect = patches.Rectangle((0, 0), 0.6, 0.6, linewidth=2, edgecolor=colors[i], facecolor='none')ax.add_patch(rect)rects.append(rect)# 轨迹线(真实路径)trail, = ax.plot([], [], color=colors[i], alpha=0.5, linewidth=1)trails.append(trail)# 观测点(雷达测量)obs_pt, = ax.plot([], [], 'o', color=colors[i], markersize=3, alpha=0.7)obs_points.append(obs_pt)# 初始帧
def init():for rect in rects:rect.set_xy((0, 0))for trail in trails:trail.set_data([], [])for obs in obs_points:obs.set_data([], [])return rects + trails + obs_points# 更新帧
def update(frame):for i in range(N):if frame < len(history[i]):x, y = history[i][frame]# 更新矩形位置(居中)rects[i].set_xy((x - 0.3, y - 0.3))# 更新轨迹(显示最近50步)start = max(0, frame - 50)trail_x = history[i][start:frame+1, 0]trail_y = history[i][start:frame+1, 1]trails[i].set_data(trail_x, trail_y)# 更新观测点if frame < len(observations[i]):ox, oy = observations[i][frame]obs_points[i].set_data([ox], [oy])return rects + trails + obs_points# 创建动画
ani = FuncAnimation(fig, update, frames=T,init_func=init, blit=True, interval=50
)plt.tight_layout()
plt.show()# 可选:保存为 GIF(需安装 pillow)
# ani.save('radar_tracking.gif', writer='pillow', fps=20)
代码运行效果:
 ·
·