fly飞控原理图讲解
MCU部分: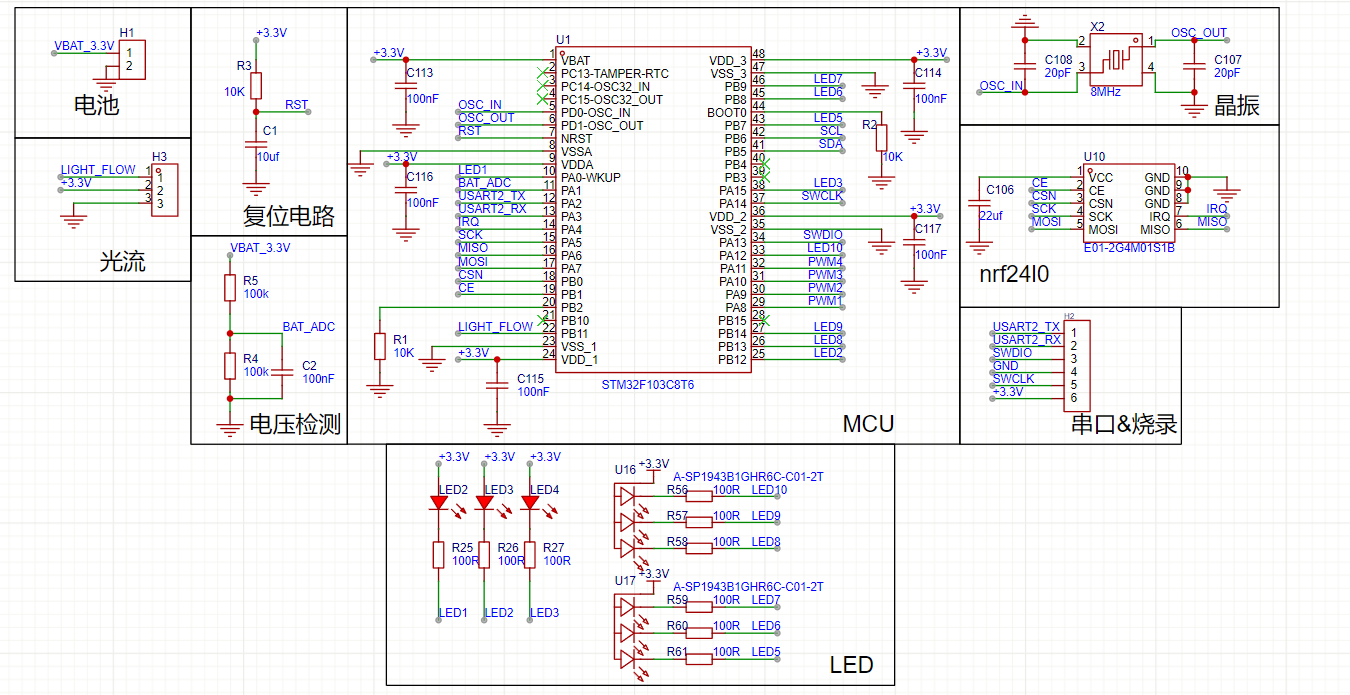
系统总体框架:
- 主控:STM32F103C8,作为传感器融合、姿态解算、PWM 输出与通信的核心。
- IMU:MPU-6050(陀螺 + 加速度 + 可用的 DMP)。通过 I²C 与 MCU 通信。
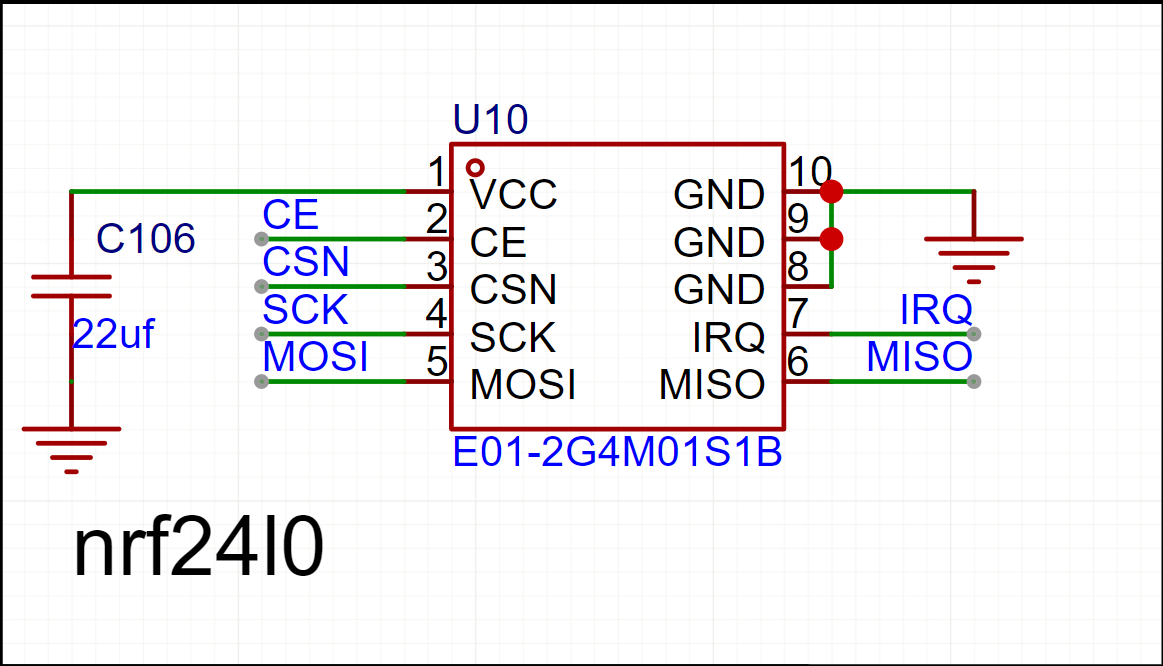
- 无线:nRF24L01 2.4GHz 模块用于遥控链路(SPI 接口:CE/CSN/SCK/MOSI/MISO + IRQ)。
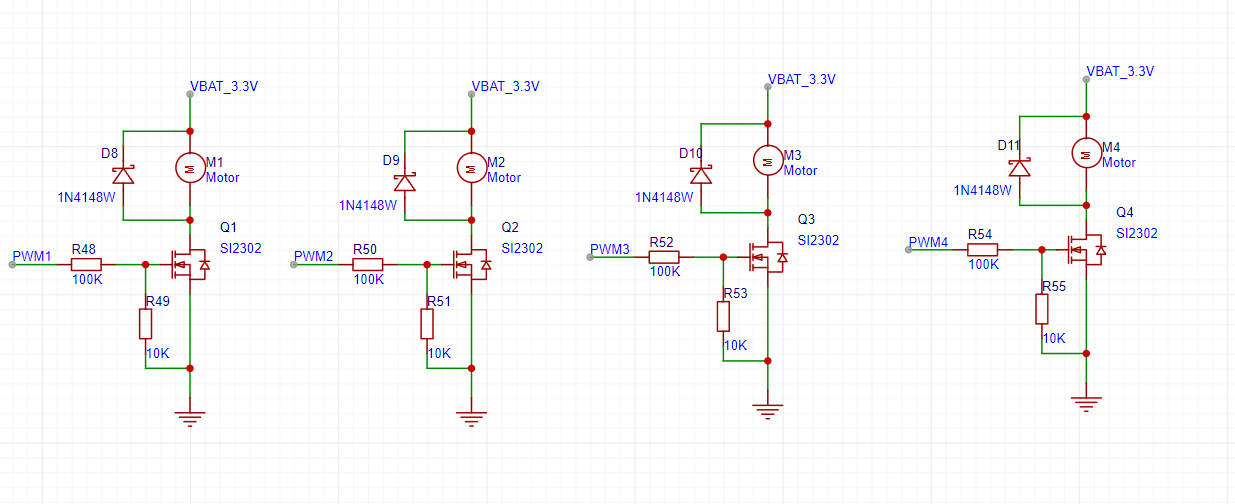
- 电机:四路 MOSFET(SI2302)由 MCU PWM 驱动(驱动拓扑在原理图里用 MOSFET 控制电机的通断)。
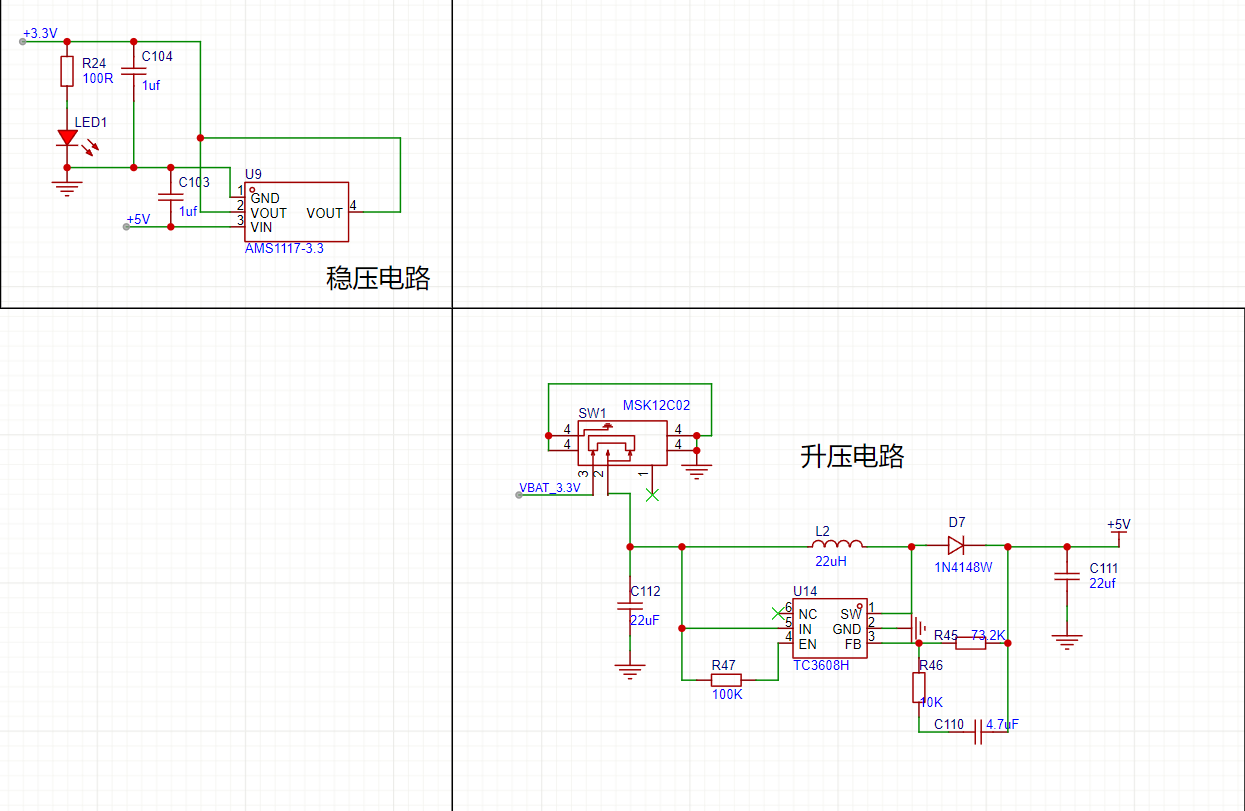
- 电源:来自电池(VBAT)通过 TC3608H 升压到 +5V,再经 AMS1117-3.3V 产生 +3.3V;同时有电池电压检测(BAT_ADC)。
MCU 部分(STM32F103C8T6):STM32F103C8T6,带外部 8MHz 晶振、复位电路、多个 LED、以及 SWD 与串口引出。原理图里列出了大量引脚信号名(USART2_TX/RX、SPI、I2C、PWM1..4、SWCLK/SWDIO、VBAT_ADC 等)。
要点:
- 晶振:8MHz 晶体 + 两个 20pF 电容(C107、C108),给 MCU 提供主时钟。确保晶体贴近芯片引脚,地线短而完整。
- 复位电路:有上拉/下拉与去耦电容(R1、R2、C1/C2 等),保证上电复位稳定。
- 电压检测(VBAT -> BAT_ADC):有电阻分压(图上有 BAT_ADC BAT_ADC 与 VBAT_3.3V 关系),用于 MCU 测量电池电压。上拉/下拉比要能把电压缩放到 MCU ADC 范围(0~3.3V)。
- 编程/烧录:通过 SWD(SWCLK、SWDIO)和一个对外的串口(USART2_TX/RX)引出,方便下载程序与串口调试。
开发/联调建议:
上电先测 +3.3V 与地的电压是否正常(没有短路)。
检查 SWD 是否能连接(用 ST-Link)。若连不上,先确认 NRST/BOOT0/电源是否正常。
用串口打印 boot 信息或 I2C 扫描表,验证外设连通性(见后面的 IMU 与 nRF 调试)。
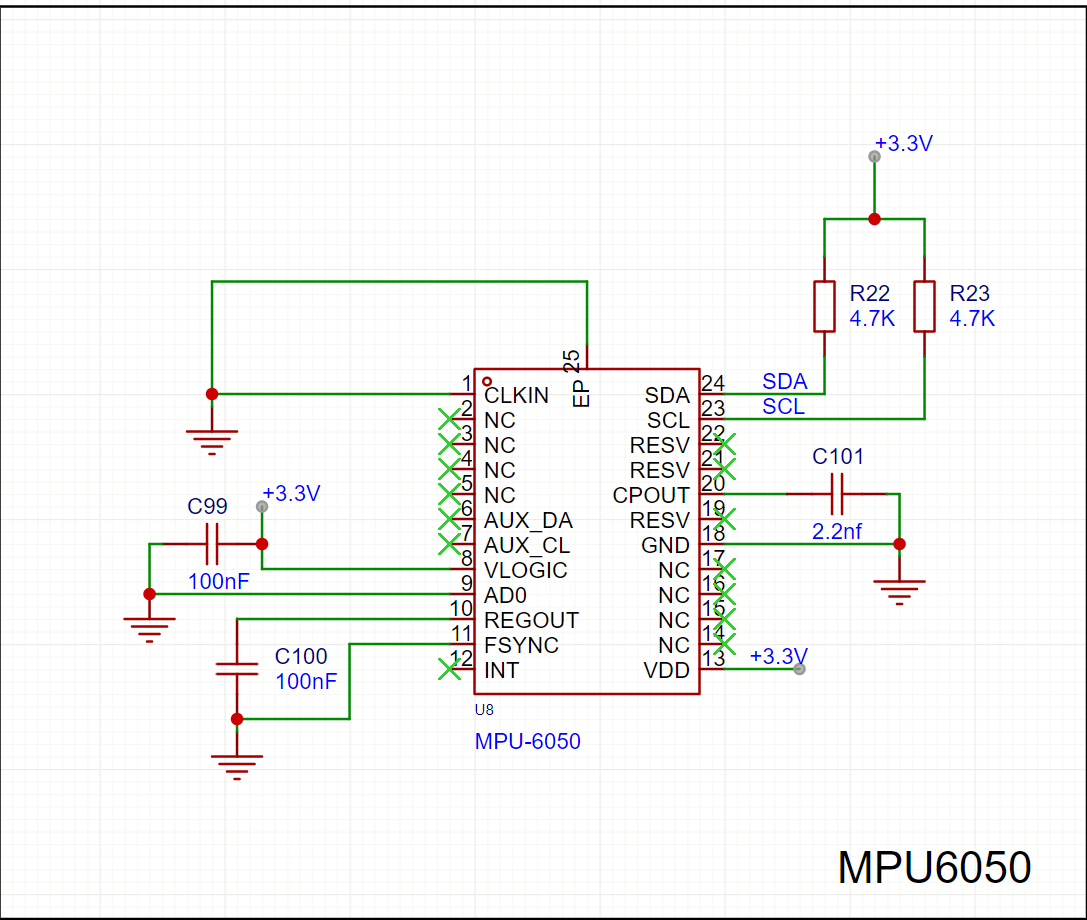
IMU(MPU-6050):
原理图关键点:U8 是 MPU-6050,SCL/SDA 两路有 4.7k 上拉到 +3.3V(R22、R23),还有 100nF 旁路电容(C99、C100),以及 C101 = 2.2nF(可能用于额外滤波/旁路)。
要点:
- I²C 总线必须有上拉(已给出 4.7k),上拉阻值常见在 2.2k~10k 之间,4.7k 是稳妥选择。
- VLOGIC / VDD 与地要干净,IMU 的旁路电容放在引脚附近可以抑制高频噪声。
- INT 引脚(中断)可以连到 MCU 的外部中断引脚,用于陀螺/加速度数据就绪或 FIFO 中断,这样可减少常驻轮询。
调测建议:
通电后用 I²C 扫描程序确认 0x68(或 AD0=1 时 0x69)是否存在。
读取 WHO_AM_I 寄存器应返回固定值(验证连通)。
若噪声高:检查 IMU 电源(VDDA/ VLOGIC)滤波与地的回路;陀螺偏置需做温度校准/静态校准。
无线与外设(nRF24L01、光流、LED)
nRF24L01(U10 / E01-2G4M01S1B):通过 SPI(CE/CSN/SCK/MOSI/MISO)连接,IRQ 引脚也拉出,模块供电为 +3.3V(nRF 对 3.3V 要求严格,5V 会烧)。图上有连接器 H2 作为外接接口。
光流 / 光流指示(LIGHT_FLOW):图中有 LIGHT_FLOW 信号与 LED 行,可能用于连接光流模块(或摄像头类模块的供电/信号),需要查具体外设引脚定义。
LED 指示:多颗 LED(LED1..LED10)每路有 100Ω 限流电阻(R25..R27, R56..R61 等)。这些 LED 常用于状态指示(ARM, ERROR, MODE, RX/LOCK 等)。
注意:
nRF 电源与天线布局很敏感:天线旁不得有大铜面积或金属屏蔽,会影响链路。
nRF 地与 MCU 地应共地,但高电流回路(电机)应有单点接地或良好分割,避免噪声回流到无线/IMU。
电机控制(PWM -> MOSFET)
Q1..Q4 为 SI2302,后面有二极管 D8..D11(1N4148),还有上拉/下拉电阻 R48..R55(100k/10k),PWM1..PWM4 为 MCU 输出驱动。电机 M1..M4 由这些开关控制。
分析与注意:
- SI2302 是常见的小信号 MOSFET(N-channel,查看封装与 Rds_on)。在原理图里看起来做为开关元件。要注意的是:如果直接把 MOSFET 当高侧开关驱动电机(电机连到 VBAT),需要 P-channel 或专用高侧驱动;若原理图用 N-channel ,常见是把 MOSFET 放在低侧做低侧开关(电机另一端接电源),或用 N-channel+驱动以驱动高侧。原理图没有明确标注高/低侧拓扑时,我们应该在 PCB 上确认 MOSFET 的实际连法。
- 1N4148 作为续流二极管看起来不太合适(1N4148 是信号二极管,反向恢复慢、电流承受小)。对直流电机/无刷驱动,应该使用快速恢复二极管或专用驱动/滤波器;如果这是直流有刷小电机(或直流风扇类),那续流电流可能很大,1N4148 可能会损坏。(若你打算驱动大电流电机,建议换成合适的肖特基或快速恢复二极管。)
- 电机回流与电气噪声会伤害 MCU 与 IMU,建议在 MOSFET 与电源侧做好滤波与共模抑制(见 PCB 布局建议)。
调试建议:
空载测试 PWM 波形(示波器)确认占空比与开关特性。
检查 MOSFET 的门极(gate)电压是否达到合适的门限(N-channel 需要足够 Vgs)。如果 Vgs 不够会导致发热/大 Rds_on。
测量电机供电电流,确认电路与器件额定值。
电源电路(升压 + 3.3V 稳压)
原理图要点:U14 TC3608H(升压 IC)把 VBAT(一般锂电)升压到 +5V(有感器 L2=22µH、C111/C112 电容等),然后 AMS1117-3.3(U9)把 +5V 线稳压到 +3.3V。图中有大量 decoupling(100nF)与电解电容(22µF/4.7µF)。
要点与建议:
- TC3608H 是开关升压,效率不错,但输出滤波(电感、肖特基、电容)布局要紧密以减少 EMI。
- AMS1117-3.3 属线性稳压(LDO)或常见模块:它会把 5V->3.3V 的压差以热的形式消耗,若负载电流大(比如 nRF + IMU + MCU + 电机驱动逻辑),AMS1117 可能发热,需考虑散热与是否直接用高效率降压芯片(建议使用低压差 LDO 或降压 DC-DC)。
- 电池检测(分压)要保证 ADC 分压网络输入阻抗不高到影响采样精度,且能承受电压范围(例如 4.2V 锂电池)。检查分压比是否把最大电池电压(例如 4.2V)缩到 <3.3V ADC 上限。
调试要点:
测量 VBAT、+5V、+3.3V 无载/满载电压。
加载测试(例如连接全部外设)观察 AMS1117 温度;若过热需改进散热或换高效降压芯片。
用示波器看 +3.3V 及 +5V 的纹波(特别是开关转换时),若纹波大,可能影响 IMU/nRF。
接口 / LED / 连接器 / 备忘
- H1:电池接口(VBAT_3.3V),H2:nRF 接口(SPI + CE/CSN/IRQ),H3:光流(LIGHT_FLOW)。这些连接器是给外设或调试使用。
- LED:每个 LED 都有 100Ω 限流,适用于 3.3V 下作为指示灯。
- DSU(或串口)用于调试,通常把 USART2 接到外部 FTDI 或 USB-to-TTL 进行日志输出。
PCB 布局与抗噪声实务提醒(非常重要)
- 分割地(GND)与大电流回路:把电机电流回路的地与敏感电源地(IMU、nRF、MCU)尽量分开并在单点连接,避免噪声耦合。
- 去耦电容:每颗 MCU/IMU/nRF 旁放 100nF 与 10µF 级去耦。原理图已给 100nF,但在 PCB 上务必靠近引脚放置。
- 天线与金属:nRF 的天线区域保持清洁,不要在上面做大铜皮或地平面。
- 电源走线:电机电源与逻辑电源分线,电源回路尽量短且宽(低阻抗)。
- MOSFET 与驱动:门极驱动线要短;门极电阻可防止振铃。若发现 MOSFET 发热,确认是否需要更大规格或更低 Rds_on 的器件。
联调与排错清单(实操步骤)
优先级从“上电、确认供电”→“外设连通”→“电机测试”。
1.上电检查
测量 VBAT、+5V、+3.3V(无元件短路)。
查看 AMS1117 温升是否合理。
2.检查 MCU
连接 ST-Link,能否识别并读取芯片 ID。
烧录最小引导程序(把 USART2 设为串口并输出 “hello”)。
3.IMU 验证
运行 I2C 扫描,确认 MPU6050 地址存在(0x68/0x69)。
读取 WHO_AM_I,读取加速度/角速度数据,查看静态零偏。
4.无线模块
确认 nRF 在 3.3V 下能上电(用简单的发射/接收测试程序)。
若链路不稳,检查天线走线与模块屏蔽/附近铜皮。
5.电机驱动
空载用示波器看 PWM 输出与 MOSFET 门极电压。
慢速、短时间通电试转,观察 MOSFET 与电源的温升与纹波。
6.功能验证
做姿态解算(滤波器 + 卡尔曼或互补滤波)并把角度输出到串口或 LED。
逐步加入电流限制 / 软件安全(防止电机短路或失控)。
原理图的几点观察与建议
- 续流二极管选型待确认:图中 1N4148 用在电机回路不太妥,建议用肖特基或专用快恢复二极管。
- MOSFET 驱动方式要确认是高侧还是低侧:若用 N-channel 做高侧开关,需要门极高于 VBAT;若无法保证,应改为低侧或使用 P-channel/高侧驱动器。
- 电源散热:AMS1117 在高电流场景会发热,考虑用降压型 DC-DC(同步降压)以提高效率。