[排序算法]希尔排序
前言
希尔排序是对直接插入排序的优化,其思路是先创造“基本有序”的条件,再进行精细的插入排序。
如果你还没有学会直接插入排序算法,那请先看博主前一篇文章:[排序算法]直接插入排序。
学完直接插入排序,我们不难得出其优缺点:
优点:当待排序序列基本有序时,直接插入排序的效率非常高,近似 O(n)。
缺点:当待排序序列完全逆序时,效率极低,为 O(n²)。因为每次插入一个新元素,都需要与前面所有已排序的元素进行比较和移动。
我们希尔排序就是为了降低缺点的影响,通过预处理,使待排序序列“基本有序”。
基本思想
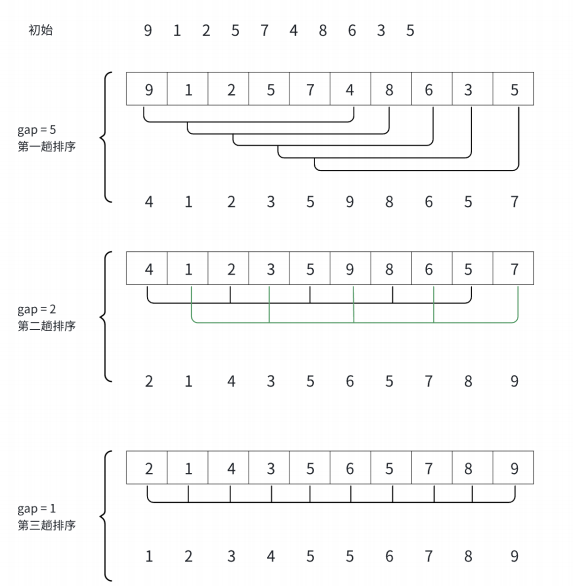
希尔排序是对直接插入排序的优化,其核心思想是通过一个递减的步长序列(gap sequence)将数组分成若干子序列,对每个子序列进行插入排序,使数组逐渐“基本有序”,最后当步长为1时进行直接插入排序。这种预处理能有效减少直接插入排序中的比较和移动次数,从而提升整体效率。
有点懵?先不要慌!下面咱们逐步分析。
具体步骤:
选择一个初始步长gap(通常为n/2或n/3)。
将数组中间隔为gap的元素分在同一组,形成多个子序列。
对每个子序列进行插入排序。
缩小gap(例如,使用gap = gap / 3 + 1),重复步骤2-3,直到gap=1。
当gap=1时,执行一次直接插入排序,此时数组已基本有序,排序效率很高。
打个比方:
详解代码
//希尔排序
void ShellSort(int* a, int n)
{//gap是步长,gap的值就是每组数据间隔//比如第一组第一个数据为arr[i]那下一个即为arr[i+gap]int gap = n;while (gap > 1){//推荐写法:除3gap = gap / 3 + 1;//i如果大于等于n-gap,会导致a[end+gap]越界访问for (int i = 0; i < n - gap; i++){//从第一个元素开始//end含义为已排序部分的最后一个元素的下标int end = i;//tmp为该组下一个元素的值int tmp = a[end + gap];//end如果小于0,则证明a[end+gap]已经和该组第一个元素互换了值while (end >= 0){//同一组中,若前面的数大于后面的if (a[end] > tmp){//后面的值等于前面的a[end + gap] = a[end];//end自身减gapend -= gap;}//否则证明已经有序else{break;}}//两种情况,if满足一种,不满足一种a[end + gap] = tmp;}}
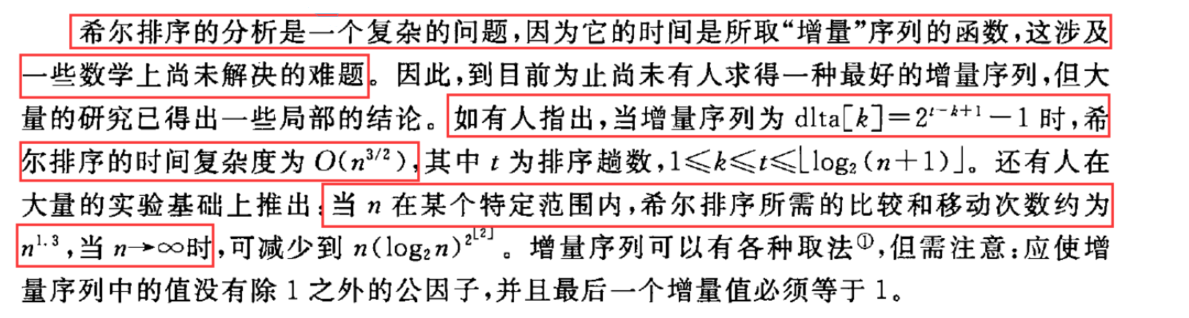
}希尔排序的时间复杂度范围大致在 O(n log²n) 到 O(n²) 之间。通过选择优秀的增量序列,其平均时间复杂度可以优化到大约 O(n^1.3) 到 O(n^1.5),这明显优于 O(n²) 的直接插入排序。
希尔排序时间复杂度不好计算,因为 gap 的取值很多,导致很难去计算,因此很多书中给出的希尔排序的时间复杂度都不固定。《数据结构(C语言版)》--- 严蔚敏书中给出的时间复杂度为:
-------有问题欢迎私信和评论------