PRNet:原始信息即全部所需
摘要
航拍图像中的小目标检测在特征提取过程中会因像素表示有限而遭受严重的信息退化,其中浅层空间细节无法有效地与语义信息对齐,导致频繁的漏检和误检。现有的基于 FPN 的方法试图通过后处理增强来缓解这些损失,但重建的细节往往偏离原始图像信息,阻碍了其与语义内容的融合。为解决这一局限性,我们提出了 PRNet,一种实时检测框架,优先保留并高效利用原始浅层空间特征以增强小目标表示。PRNet 通过两个模块实现这一目标:用于通过骨干网络复用和迭代优化实现空间-语义对齐的渐进优化颈部(Progressive Refinement Neck, PRN),以及通过优化重排和卷积在下采样过程中保留浅层信息的增强型 SliceSamp(Enhanced SliceSamp, ESSamp)。在 VisDrone、AI-TOD 和 UAVDT 数据集上的大量实验表明,PRNet 在可比计算约束下优于当前最先进方法,实现了更优的精度-效率权衡。
代码 — https://github.com/hhao659/PRNet
引言
航拍图像中的小目标检测在遥感和计算机视觉领域变得越来越重要,支持交通监控(2018)、救援行动(2022)和精准农业(2022)等关键应用。这些应用通常需要在资源受限的边缘设备上进行实时推理,同时保持对占据极少像素且难以辨识的目标的高精度检测。
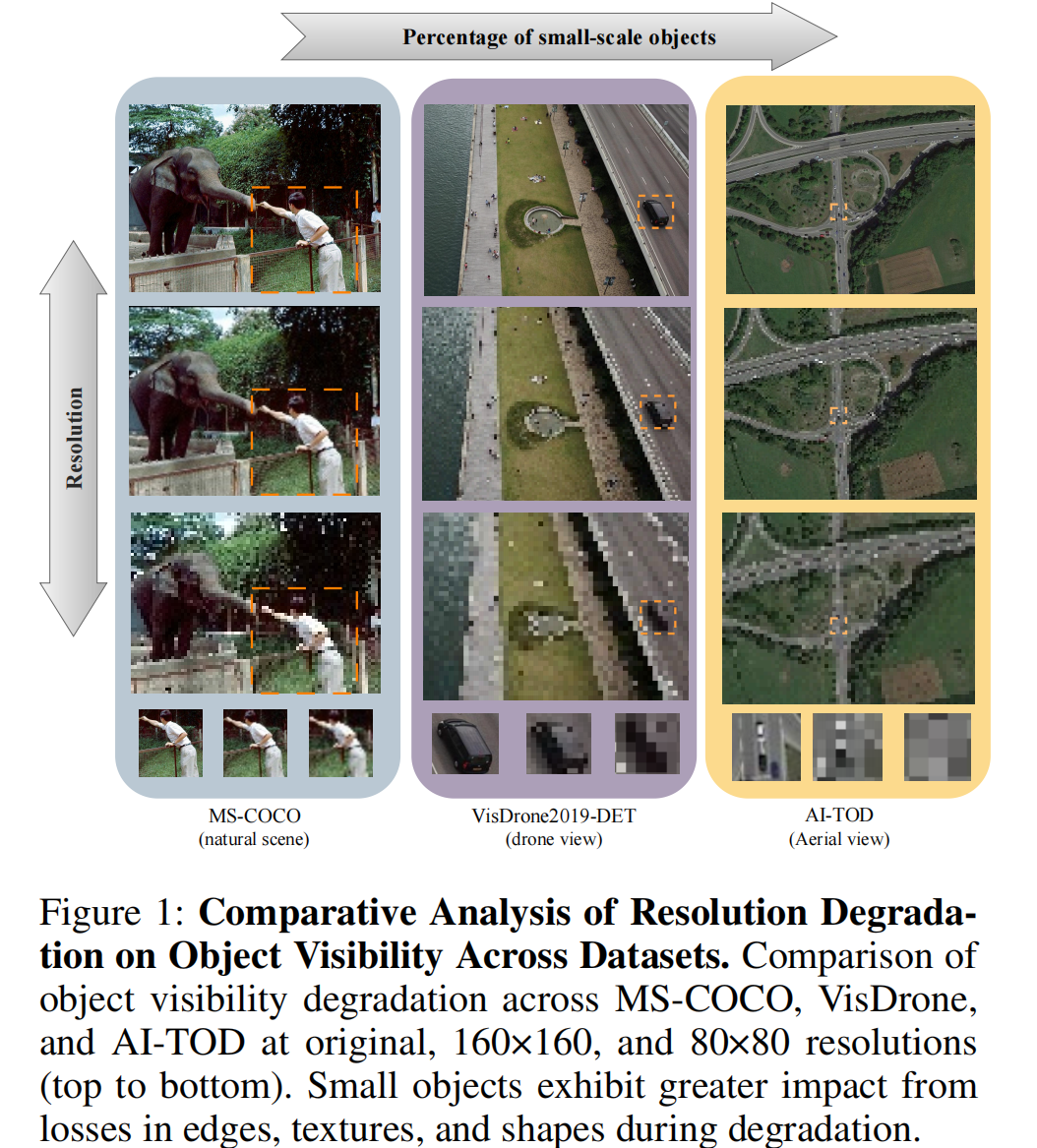
航拍图像中的小目标检测本质上非常困难,因为它们的像素表示极其有限且背景复杂杂乱。与自然场景检测中目标通常占据图像较大比例不同,航拍目标异常微小——通常小于 32x32 像素,仅占图像总面积的 0.1% 至 1%(2014)。如图 1 所示,当图像分辨率降低(从原始分辨率降至 160×160160 \times 160160×160 和 80×8080 \times 8080×80)时,小目标相比大目标会遭受灾难性的信息损失。这一现象反映了模型前向传播过程中发生的信息退化(2021;2025),其中浅层空间细节的丢失导致语义不匹配,进而增加误检和漏检率(2025;2025)。
当代目标检测模型由骨干网络、颈部和头部组成,其中颈部——通常称为特征金字塔网络(FPN, 2017)——是多尺度特征聚合的主要架构(2021)。FPN 因其跨不同分辨率聚合特征的能力而成为多尺度目标检测的基础框架。然而,传统 FPN 在航拍图像小目标检测中表现不佳。这一局限性源于其依赖于已经过多次卷积和采样操作的特征进行融合,导致对识别小目标至关重要的高分辨率空间细节大量丢失。
近期的 FPN 变体(2025;2025;2025)主要关注增强特征融合或添加额外优化模块。然而,这些方法未能充分缓解特征提取过程中(尤其是在早期阶段)累积的渐进式信息退化,导致无法通过上采样或传统特征融合完全恢复的细粒度细节不可逆丢失。具体而言,基于 FPN 的方法面临两个关键挑战:(1) 浅层特征利用不足:高分辨率浅层特征(例如 P2 层级)通常仅使用一次,导致对小目标判别至关重要的空间信息永久丢失。(2) 特征不对齐:难以将浅层空间特征与深层语义表示充分融合以处理小目标,从而导致特征不匹配,降低检测效果。
为解决这些挑战,保留并有效利用初始处理中的高分辨率信息至关重要。我们提出了 PRNet,一种专为航拍小目标检测设计的新框架。首先,为最大化保留浅层特征的利用,PRNet 引入了渐进优化颈部(PRN),通过多阶段骨干网络复用迭代优化高分辨率特征,确保稳健的小目标表示同时缓解特征不对齐问题。PRN 具有灵活性,可集成到各种检测框架中。其次,为减轻下采样过程中的细节丢失,PRNet 采用了增强型 SliceSamp(ESSamp)模块,通过优化空间重排和增强深度卷积来实现更优的特征保留。
我们的贡献总结如下:
- 我们揭示了现有类 FPN 方法的关键局限性,特别是信息退化和特征不对齐问题,使其不适用于航拍图像数据集。
- 我们设计了一种新颖的颈部架构 PRN,通过多阶段特征复用和渐进融合实现高效的高分辨率细节保留。此外,我们开发了增强型下采样模块 ESSamp,以改善浅层空间信息的保留。
- 实验结果表明,我们提出的 PRNet 显著超越了当前最先进方法,在保持竞争力效率的同时实现了更优的检测精度。
相关工作
小目标检测
航拍图像中的目标检测是小目标检测的代表性任务,一直是一个挑战。FFCA-YOLO(2024a)提出了一个面向遥感图像的上下文感知检测框架,增强了模型感知语义上下文的能力。SFFEF-YOLO(2025)引入了一个细粒度特征提取模块来替代标准卷积,旨在减少采样过程中的信息丢失。FBRT-YOLO(2025)结合了特征互补映射模块和多核感知单元,以改善语义对齐和多尺度目标感知,在检测精度和效率之间实现了更好的权衡。然而,小目标的高精度实时检测仍是一个具有挑战性的任务。
特征金字塔网络
特征金字塔网络(FPNs)是多尺度检测的主导架构。原始 FPN 设计通过自上而下的路径和横向连接将深层语义特征与浅层空间特征集成。后续改进如 PANet(2018)增加了自下而上的路径,BiFPN(2020)采用加权双向融合,提高了集成效率。对于小目标,DSP-YOLO(2024b)引入了轻量级、细节敏感的 DsPAN,而 E-FPN(2025)双向增强了语义和细粒度细节。然而,细节丢失问题无法得到缓解。与这些在提取后优化融合的方法不同,我们的 PRN 通过迭代复用骨干网络特征并应用渐进融合来保留高分辨率细节,最大限度地减少小目标检测的信息丢失。
特征保留下采样
下采样方法保留关键信息的能力对整体模型性能至关重要,尤其是对微小目标。内容自适应下采样(2023)试图在子采样过程中保留关键区域,但严重依赖于准确的重要性掩码,而这些掩码在复杂航拍场景中的小目标上难以生成。SliceSamp(2023)利用空间切片和深度可分离卷积来提高计算效率,同时更好地保留特征信息。DiffStride(2023)引入可学习的步长参数来自适应控制分辨率损失,但其增加的模型复杂性限制了在资源受限环境中的部署。尽管这些方法取得了显著进展,但在下采样过程中有效保留细节特征仍然是一个重大挑战。
方法论
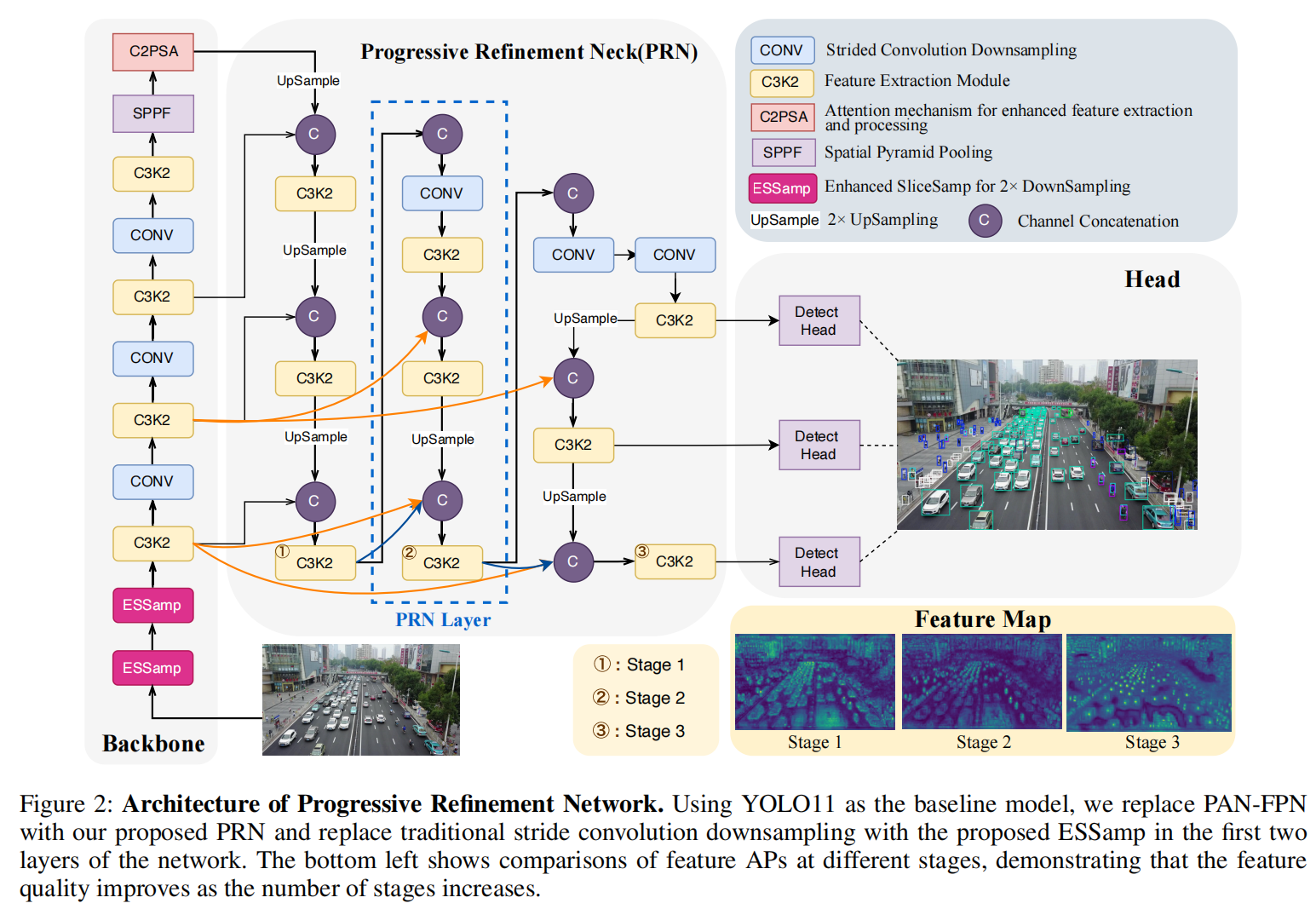
在本节中,我们介绍一个基于 YOLO11(2024)构建的检测框架,名为 PRNet。PRNet 的设计遵循一个连贯的流程:首先,ESSamp 优化骨干网络中的下采样以保留浅层空间细节;其次,PRN 通过骨干网络复用和渐进融合在颈部迭代优化这些特征。图 2 展示了整体架构,其中 PRN 替代了传统的 PAN-FPN,ESSamp 替代了骨干网络中的前两个步长卷积。ESSamp 通过确保高质量的浅层输入用于复用,补充了 PRN。
渐进优化颈部
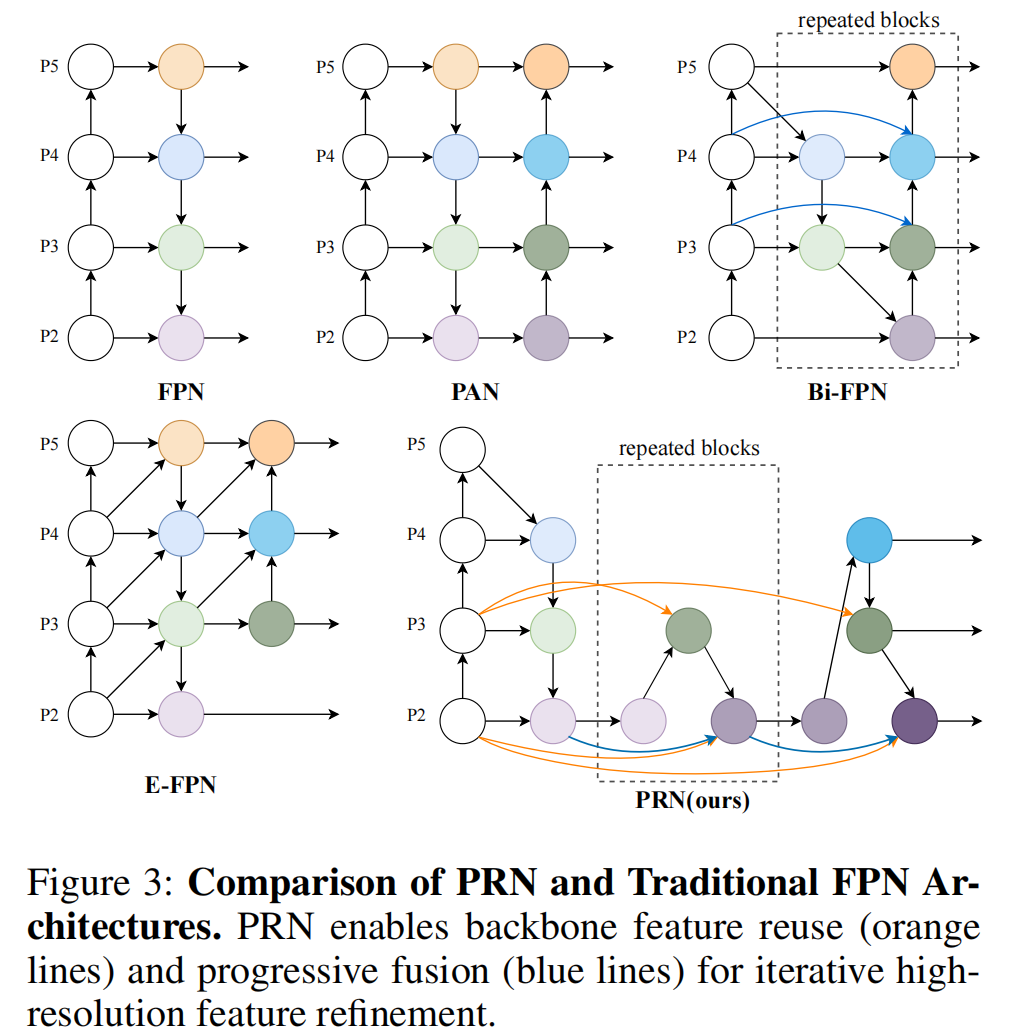
传统的基于 FPN 的方法存在高分辨率骨干网络特征利用不足的问题。如图 3 所示,包含关键空间细节的浅层特征通常在融合过程中仅使用一次。这种单次使用模式限制了保留的高分辨率信息的利用,可能导致小目标检测的次优特征表示。为解决这一局限性,我们提出了渐进优化颈部(PRN)。该模块通过多阶段骨干网络特征复用最大化保留原始高分辨率细节,使迭代优化能够充分利用详细信息以增强小目标表示。PRN 的详细结构如图 2 所示,它利用了骨干网络特征复用机制和渐进融合策略。该模块的实现细节如下。
初始特征融合。PRN 从标准的自上而下融合开始(如 PAN-FPN 中),建立初始的空间-语义集成:
Pitd=Conv{Concat(Resize(Pi+1),Piin)},i∈{2,3,4}P_{i}^{td}=Conv\{Concat(Resize(P_{i+1}),P_{i}^{in})\},\quad i\in\{2,3,4\}Pitd=Conv{Concat(Resize(Pi+1),Piin)},i∈{2,3,4}
其中 Resize 表示用于分辨率匹配的上采样或下采样操作,Conv 表示用于特征处理的卷积操作(使用 3x3 卷积核)。这种初始融合保持了与基线 YOLO11 的兼容性,同时为后续优化阶段奠定了基础。
骨干网络特征复用机制。我们注意到骨干网络特征的信息价值:来自骨干网络的浅层特征 P2inP_{2}^{in}P2in 和 P3inP_{3}^{in}P3in 包含相对未处理的原始细节信息,这些信息在传统 FPN 中单次使用后即被丢弃,造成信息浪费。为此,PRN 通过多阶段骨干网络特征复用补偿传统融合中的信息稀释。具体而言,PRN 对自上而下融合的 P2tdP_{2}^{td}P2td 进行下采样,然后将其与未使用的骨干网络特征 P3inP_{3}^{in}P3in 连接,重新引入中层细节;随后,将结果上采样并与同样原始的骨干网络特征 P2inP_{2}^{in}P2in 连接,最大化利用高分辨率原始细节。如以下公式所示:
P3td1=Conv{Concat(Resize(P2td),P3in)}P2refine1=Conv{Concat(Resize(P3td1),P2td,P2in)}\begin{aligned}P_{3}^{td^{1}}=Conv\{Concat(Resize(P_{2}^{td}),P_{3}^{in})\}\\ P_{2}^{refine^{1}}=Conv\{Concat(Resize(P_{3}^{td^{1}}),P_{2}^{td},P_{2}^{in})\}\end{aligned}P3td1=Conv{Concat(Resize(P2td),P3in)}P2refine1=Conv{Concat(Resize(P3td1),P2td,P2in)}
融合后的特征包含足够的语义信息。过多的上下采样操作会稀释小目标检测所依赖的稀缺空间信息。因此,我们采用单次下采样-上采样策略,在最大化空间细节保留的同时保持计算效率。
渐进融合策略。PRN 将早期阶段优化的特征(例如 P2tdP_{2}^{td}P2td)整合到后续计算中,从而引导优化过程并通过引入上下文约束防止无差别特征融合。这种渐进设计使高分辨率特征能够在多个阶段迭代增强,同时与深层语义表示保持一致。如图 3 中的蓝色连接所示,这些渐进链接形成了一个逐步优化的闭环。为确保高效优化,渐进融合过程被构造成重复块,每个块复用骨干网络特征并执行一次下采样-上采样循环。这种设计保证了每个优化阶段都能接收来自骨干网络的原始特征输入,减轻递归信息衰减,同时允许语义表示逐步丰富而高分辨率细节得以保留。
输出生成。为生成适用于三个检测尺度的输出特征,PRN 对最终优化的特征进行结构化处理,如公式 (4)-(6) 所示:
P4out=Conv{Resize(P2refinei)}P_{4}^{out}=Conv\{Resize(P_{2}^{refine^{i}})\}P4out=Conv{Resize(P2refinei)}
P3out=Conv{Concat(Resize(P4out),P3in)}P_{3}^{out}=Conv\{Concat(Resize(P_{4}^{out}),P_{3}^{in})\}P3out=Conv{Concat(Resize(P4out),P3in)}
P2out=Conv{Concat(Resize(P3out),P2refinei,P2in)}P_{2}^{out}=Conv\{Concat(Resize(P_{3}^{out}),P_{2}^{refine^{i}},P_{2}^{in})\}P2out=Conv{Concat(Resize(P3out),P2refinei,P2in)}
增强型 SliceSamp
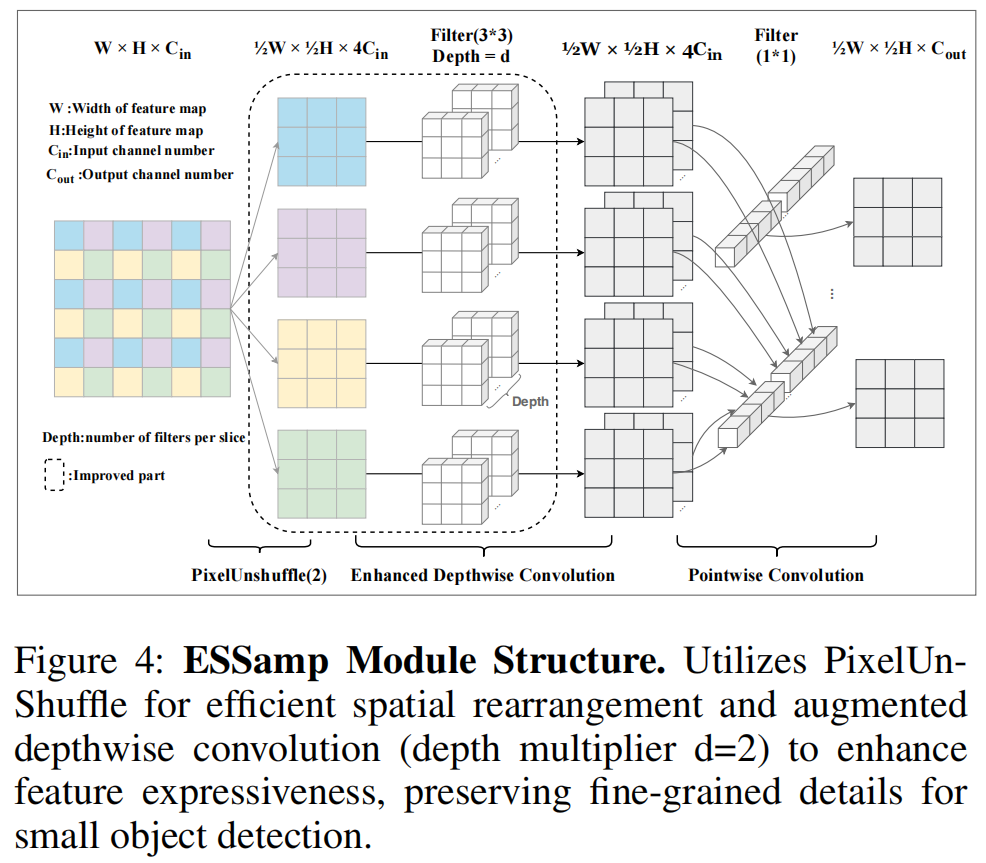
虽然 PRN 最大化了保留特征的利用,但有效的下采样对于确保骨干网络的高质量输入至关重要;为此,我们引入了 ESSamp。下采样操作中的信息丢失会严重影响浅层骨干网络特征的质量,而这些特征对小目标检测中的有效特征复用至关重要。传统的下采样方法(如步长卷积)通常会导致细粒度细节的严重丢失。同时,现有的细节保留方法(如 SliceSamp)存在计算效率低下和特征表达能力有限的问题。为克服这些局限性,我们引入了增强型 SliceSamp(ESSamp)模块。ESSamp 通过改进的深度卷积增强特征表示,并进一步优化空间重排过程以提高计算效率。ESSamp 的整体结构如图 4 所示,其设计细节如下。
增强特征表达。现有细节保留下采样方法的主要局限在于其特征建模能力不足。SliceSamp 中的标准深度卷积每个输入通道仅使用一个卷积核,严重限制了捕捉小目标判别所需复杂局部模式的能力。为克服这一瓶颈,我们引入了带深度乘子 ddd 的增强深度卷积,为每个输入通道分配多个卷积核以丰富局部特征表示。
这一设计得到了经验分析和感受野考虑的支持。通过引入深度乘子 ddd,特征表达能力得到增强,其影响通过消融研究得到验证(例如表 7)。例如,当 d=2d=2d=2 时,局部结构建模能力得到有效提升。这种增强对小目标尤其关键,因为其判别信息极其有限,细微的局部模式对可靠检测至关重要。
改进的空间重排。除了核心特征增强外,我们还改进了 SliceSamp 中的空间重排过程以提高计算效率。SliceSamp 的显式索引操作(例如,X=X=X= Concat~(Xin[:,:,i::2,j::2]),i,j∈{0,1}\operatorname{\widetilde{Concat}}(X_{in}[:,:,i\quad::\quad2,j\quad::\quad2]),i,j\quad\in\quad\{0,1\}Concat(Xin[:,:,i::2,j::2]),i,j∈{0,1})会产生高内存访问开销,无法充分利用 GPU 并行计算能力。我们用 PixelUnShuffle 替代这些显式操作,这改善了内存合并,并在保持细节保留特性的同时提供了常数因子的运行时间减少,如高效子像素卷积网络(Shi 等,2016)所示。如下式所示:
X=PixelUnShuffle(2,Xin)X=\mathrm{PixelUnShuffle}(2,X_{in})X=PixelUnShuffle(2,Xin)
Y=GELU(BN2(W2PW∗GELU(BN1(W1EDW⊙X))))Y=\mathrm{GELU}(\mathrm{BN}_2(W_2^{PW}*\mathrm{GELU}(\mathrm{BN}_1(W_1^{EDW}\odot X))))Y=GELU(BN2(W2PW∗GELU(BN1(W1EDW⊙X))))
其中 W1EDW∈R4dC×4C×3×3W_{1}^{EDW}\in\mathbb{R}^{4dC\times4C\times3\times3}W1EDW∈R4dC×4C×3×3 是扩展的深度卷积核,组数为 4C,输出通道数为 4dC,d=2d=2d=2;W2PW∈RCout−1×4dC×1×1W_{2}^{PW}\in\mathbb{R}^{C_{out}^{-1}\times4dC\times1\times1}W2PW∈RCout−1×4dC×1×1 是逐点卷积核;ddd 是深度乘子;* 表示标准卷积,⊙\odot⊙ 表示深度卷积。
与传统 SliceSamp 相比,ESSamp 在保持高保真下采样优势的同时,显著提高了计算效率和特征表达能力,为 PRN 提供了更高质量的特征输入,在细节保留和计算效率之间实现了优化平衡。通道从 C 扩展到 4dC 显著增强了特征表达,但也增加了深度卷积的计算负担。后续的逐点卷积需要将 4dC 压缩回目标通道数,压缩比为 4d:1,存在信息瓶颈风险。在后续实验中,我们对超参数 ddd 进行消融研究,以在特征表达能力和计算开销之间取得最佳平衡。ESSamp 与 PRN 的集成形成了保留和利用原始信息的完整路径,提升了航拍图像的整体检测性能。
实验
实现细节
我们在三个航拍图像目标检测基准上进行了全面实验:VisDrone(2019)、AI-TOD(2022)和 UAVDT(2018)。实验在 RTX 3090 GPU 上进行。我们的网络使用随机梯度下降(SGD)优化器训练 400 个 epoch,动量为 0.937,权重衰减为 0.0005,批大小为 8,耐心值为 50,初始学习率为 0.01。所有其他配置与 YOLO11 相同。
VisDrone 数据集结果
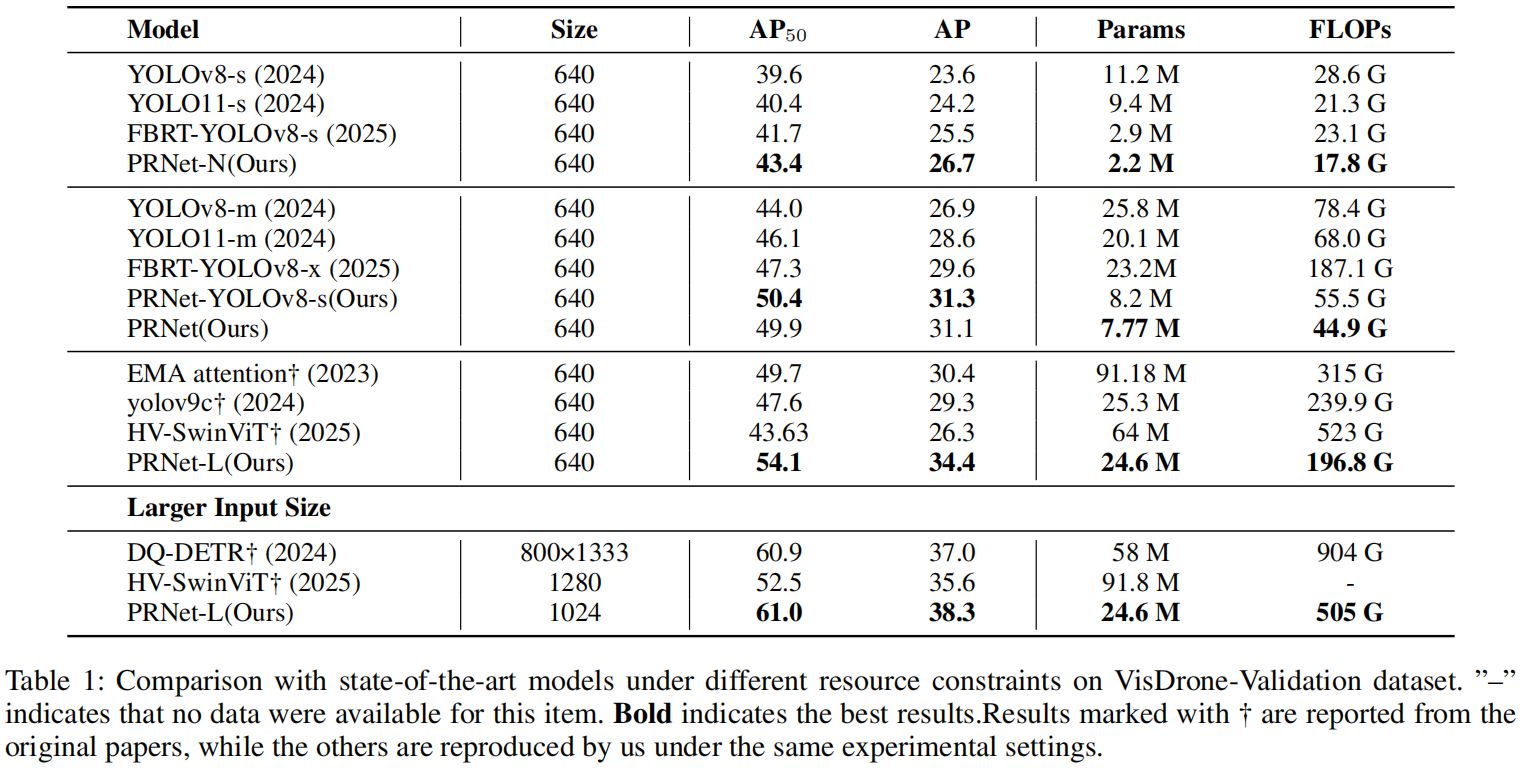
与最先进方法的比较。如表 1 所示,我们在 VisDrone 验证数据集上对 PRNet 与现有最先进检测方法进行了全面比较。实验结果表明,PRNet 在不同资源约束下均表现出卓越的性能优势。对于轻量级模型,PRNet-N 仅用 2.2M 参数和 17.8G FLOPs 就达到了 43.4% AP50\mathrm{AP_{50}}AP50 和 26.7% AP,相比 YOLO11-s,分别提高了 3.0% AP50\mathrm{AP_{50}}AP50 和 2.5% AP,同时减少了 76.6% 的参数量。与参数量相近的 FBRT-YOLO-S 相比,AP50\mathrm{AP_{50}}AP50 和 AP 分别提高了 1.0% 和 0.8%。对于中等规模模型,我们提出了两个变体:基于 YOLO11 的 PRNet 以 7.77M 参数和 44.9G FLOPs 达到了 49.9% AP50\mathrm{AP_{50}}AP50 和 31.1% AP,而基于 YOLOv8-s 骨干网络的 PRNet-YOLOv8-s 以 8.2M 参数和 55.5G FLOPs 实现了更佳性能,达到 50.4% AP50\mathrm{AP_{50}}AP50 和 31.3% AP,表明即使使用与 FBRT-YOLOv8-X 相同的 YOLOv8 骨干网络,我们的框架也能实现更优性能(50.4% vs. 47.3% AP50\mathrm{AP_{50}}AP50);此外,如表 8 所示,PRN 可有效集成到 FBRT-YOLO 中,进一步提升其检测性能。相比 YOLO11-m,分别提高了 3.8% AP50\mathrm{AP_{50}}AP50 和 2.5% AP,同时减少了 61.3% 的参数量和 34.0% 的计算成本。对于大规模模型,PRNet-L 达到了最佳精度 54.1% AP50\mathrm{AP_{50}}AP50 和 34.4% AP,全面超越所有对比方法,验证了我们的方法在复杂航拍场景中的检测优势。
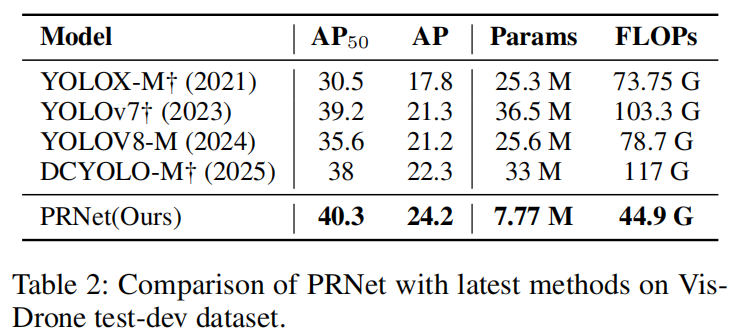
泛化验证。为进一步验证 PRNet 的泛化能力,我们在 VisDrone test-dev 数据集上与最新方法进行了比较,结果如表 2 所示。PRNet 达到 40.3% AP50\mathrm{AP_{50}}AP50 和 24.2% AP,比 YOLOv8-M(2024)高出 4.7% AP50\mathrm{AP_{50}}AP50 和 3.0% AP,比 DCYOLO-M(2025)高出 2.3% AP50\mathrm{AP_{50}}AP50 和 1.9% AP。这些结果验证了 PRNet 在航拍图像检测中的稳健稳定性和优越性。
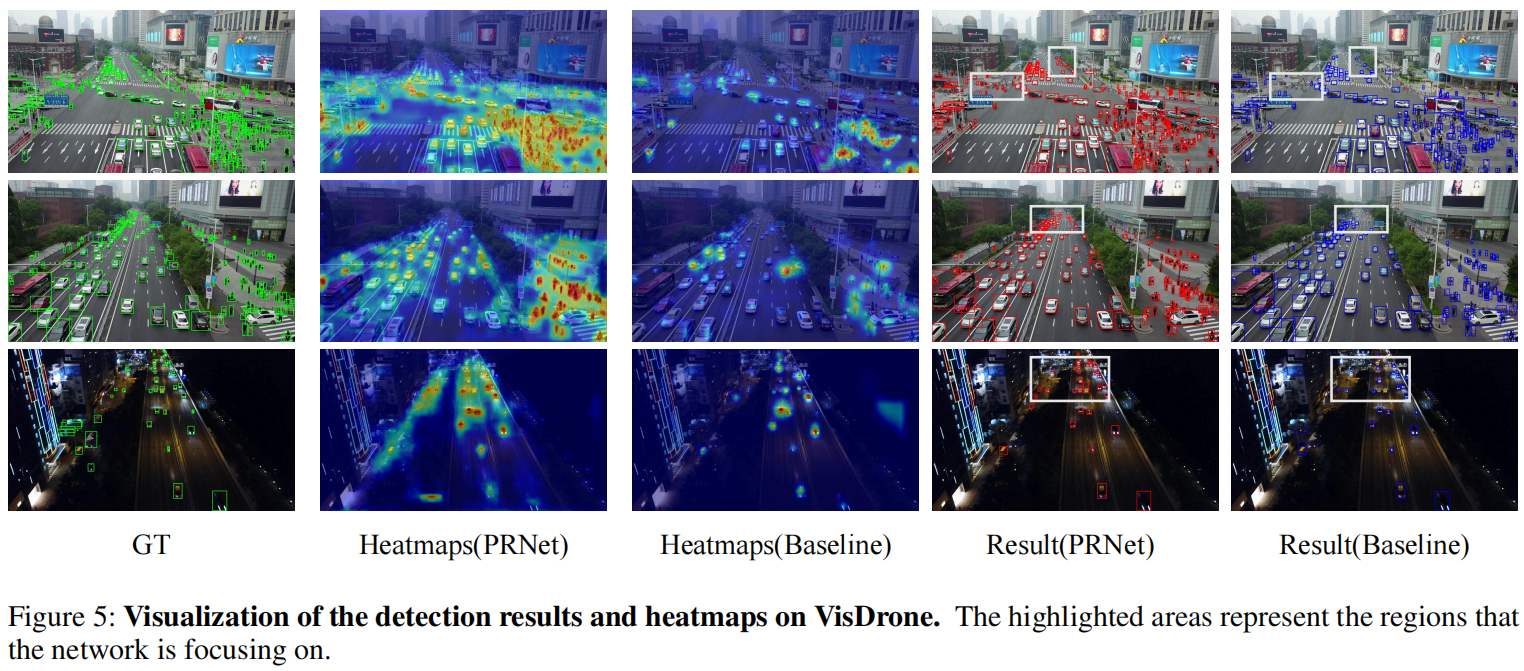
定性结果。为进一步说明 PRNet 在航拍图像小目标检测中的优越性能,我们在图 5 中展示了热力图和检测结果的可视化。热力图显示 PRNet 相比基线对小而密集的目标有更强的关注,而检测结果展示了与真实标注更精确对齐的定位。
AI-TOD 数据集结果
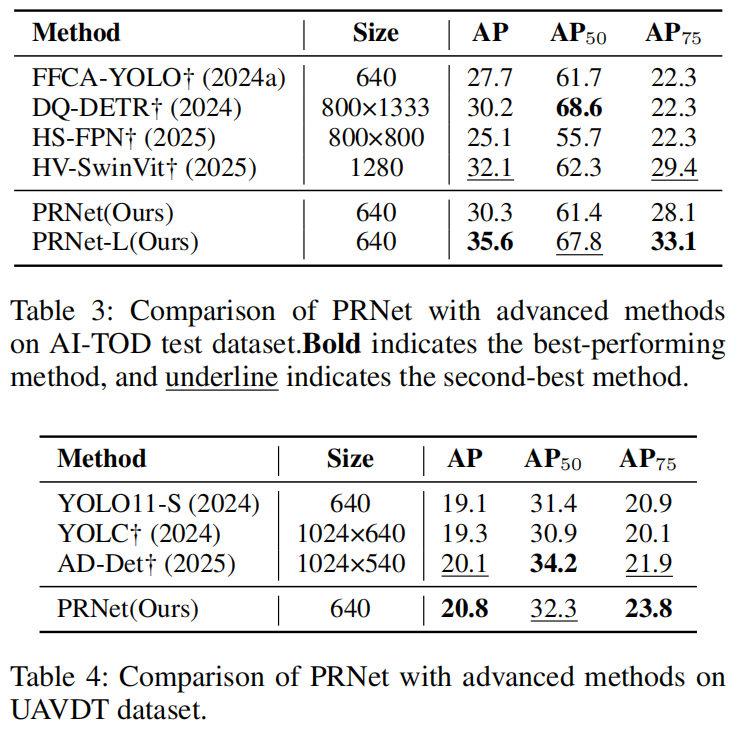
AI-TOD 数据集包含大量极小目标和高密度场景,对检测算法的细粒度特征提取能力提出了更高要求。为进一步验证我们的方法在遥感小目标检测中的优越性,我们在 AI-TOD 测试集上评估了 PRNet 和 PRNet-L。如表 3 所示,在紧凑的 640x640 分辨率下,PRNet 达到 30.3% AP、61.4% AP50\mathrm{AP_{50}}AP50 和 28.1% AP75\mathrm{AP_{75}}AP75,优于大多数基准。PRNet-L 创下了新纪录,达到 35.6% AP 和 33.1% AP75\mathrm{AP_{75}}AP75,尽管 dQ-DETR(2024)和 HV-SwinVit(2025)使用了更大的输入尺寸,仍被超越。这些结果凸显了我们的框架在遥感场景中的卓越精度和效率。
UAVDT 数据集结果
表 4 展示了在 UAVDT 数据集上的比较结果。我们提出的方法超越了现有方法,如 YOLC(2024)和 AD-Det(2025)。使用更小的 640 输入尺寸,PRNet 达到 20.8% AP、32.3% AP50\mathrm{AP_{50}}AP50 和 23.8% AP75\mathrm{AP_{75}}AP75,尽管 AD-Det 使用了更大的 1024×5401024 \times 5401024×540 分辨率,仍在 AP 和 AP75\mathrm{AP_{75}}AP75 上优于其他最先进方法。这证明了我们检测框架的有效性。
消融实验
我们在 VisDrone 数据集上使用 YOLO11-S 作为基线进行消融实验,以验证 PRNet 的核心组件。
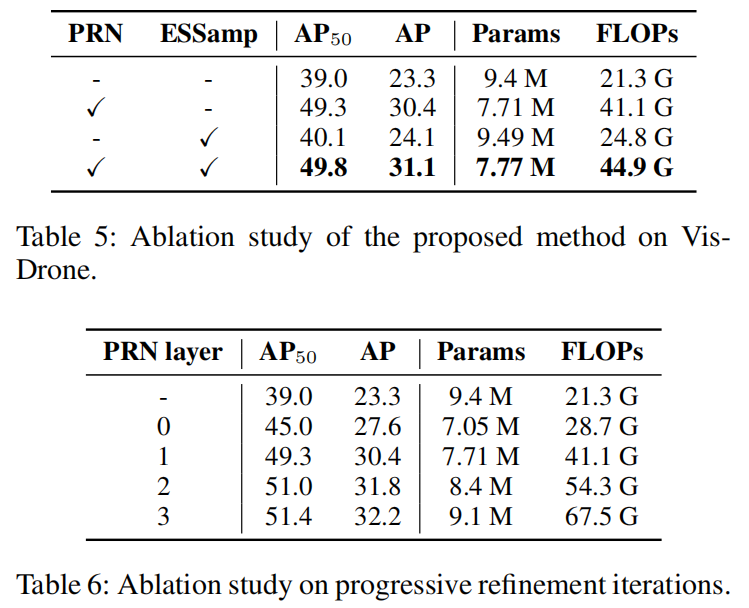
关键组件效果。如表 5 所示,基线 YOLO11s 达到 39.0% AP50\mathrm{AP_{50}}AP50 和 23.3% AP。仅添加 PRN 就将 AP50\mathrm{AP_{50}}AP50 提高 10.3% 至 49.3%,AP 提高 7.1% 至 30.4%,同时减少了 18% 的参数量(从 9.4M 减至 7.71M)。仅使用 ESSamp 获得适度增益(40.1% AP50\mathrm{AP_{50}}AP50,24.1% AP)。结合 PRN 和 ESSamp 达到最佳性能(49.8% AP50\mathrm{AP_{50}}AP50,31.1% AP),参数量为 7.77M,FLOPs 为 44.9G,展示了它们的协同效应。尽管 PRNet 相比基线增加了 110.7% 的 FLOPs(从 21.3G 增至 44.9G),但这种计算开销是策略性的:PRN 的迭代优化主要在小目标所在的高分辨率特征上操作,将增加的计算直接转化为显著的精度增益(10.8% AP50\mathrm{AP_{50}}AP50,7.8% AP),同时我们的整体框架相比最先进方法保持了优越的效率——例如,达到与 YOLO11-m 相当的精度(46.1% AP50\mathrm{AP_{50}}AP50),同时使用 34.0% 更少的 FLOPs(44.9G vs. 68.0G),展示了航拍小目标检测中优越的精度-效率权衡。
渐进优化阶段效果。表 6 显示,将 PRN 迭代次数从 0 增加到 3,AP50\mathrm{AP_{50}}AP50 从 45.0% 提高到 51.4%,AP 从 27.6% 提高到 32.2%。尽管进一步增加重复次数可以继续提高精度,但计算开销也显著增长。因此,考虑到实时性能,我们选择 1 次重复作为最佳配置。
ESSamp 中深度乘子效果。表 7 评估了 ESSamp 的深度乘子。深度=2 达到最佳性能(49.8% AP50\mathrm{AP_{50}}AP50,31.1% AP),相比深度=1(等同于 SliceSamp)提高了 1.2% AP50\mathrm{AP_{50}}AP50 和 0.9% AP。进一步将深度增加到 3,尽管理论上能进一步增强特征表达,但通道数的急剧增加需要在后续逐点卷积中使用更大的压缩比,导致关键信息丢失和检测精度下降。因此,我们选择深度=2 作为 ESSamp 的最佳配置。
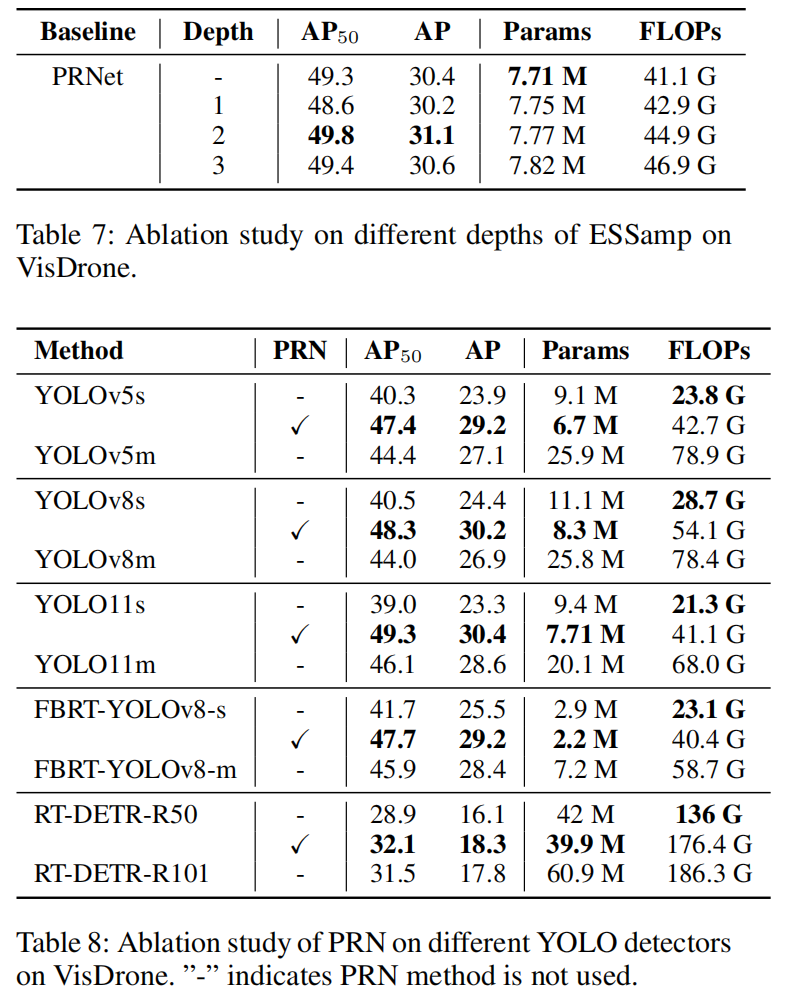
PRN 泛化能力效果。表 8 验证了 PRN 在 YOLOv5s、YOLOv8s、YOLO11s、FBRT-YOLOv8-s 和 RT-DETR-R50 上的通用性。将 PRN 引入所有测试的检测器后,检测精度显著提高。YOLO11s+PRN 获得最高增益,AP50\mathrm{AP_{50}}AP50 提高 10.3%,AP 提高 7.1%,同时减少了 18% 的参数量。值得注意的是,当将 PRN 应用于最先进的 FBRT-YOLOv8-s 基线(41.7% AP50\mathrm{AP_{50}}AP50)时,我们的方法达到 47.7% AP50\mathrm{AP_{50}}AP50 和 29.2% AP——显著提高了 6.0% AP50\mathrm{AP_{50}}AP50 和 3.7% AP——同时将参数量从 2.9M 减少到 2.2M,证明 PRN 可以进一步增强已优化的架构。此外,即使与更大的 m 系列模型相比,带有 PRN 的轻量级模型也能在更少资源约束下实现更优的检测性能,验证了 PRN 在不同架构中的通用性和有效性。
由于篇幅限制,更多实验结果和可视化见附录。
结论
本文针对航拍图像小目标检测中的信息丢失挑战,提出了 PRNet,一种新颖的实时检测框架,优先保留并高效利用原始浅层空间特征。该框架引入了两项关键创新:渐进优化颈部(PRN),通过多阶段骨干网络特征复用和迭代优化实现增强的空间-语义对齐;增强型 SliceSamp(ESSamp),通过改进的空间重排和增强的深度卷积优化下采样,最大限度减少细节退化。在 VisDrone、AI-TOD 和 UAVDT 数据集上的大量实验表明,PRNet 在保持竞争力计算效率的同时实现了卓越的检测精度,在各种资源约束下超越了当前最先进方法。