2025年RAS SCI2区,基于事件触发的城市无人机跟踪地面运动目标集成动态任务分配,深度解析+性能实测
目录
- 1.摘要
- 2.问题描述
- 3.二元混合粒子群算法
- 4.结果展示
- 5.参考文献
- 6.代码获取
- 7.算法辅导·应用定制·读者交流
1.摘要
本文提出了一种通过事件触发机制实现的集成动态任务分配方法,用于多个无人机(UAVs)在城市环境中协同跟踪多个地面移动目标(GMTs)。构建了时变01整数规划(ZOIP)模型用于任务分配,并提出递归视界框架进行路径规划,将问题转化为混合整数非线性规划(MINLP)模型。通过松弛的满意度顺序,设计了一个包含三目标和优先级的模糊满意度目标规划模型,作为集成任务分配中的时变奖励。为了减轻计算负担,设计了基于三种触发条件的事件触发机制,实现集成优化与纯路径规划的切换。考虑到解决集成任务分配MINLP模型的困难,采用了二进制混合粒子群优化(BHPSO)算法进行求解。
2.问题描述
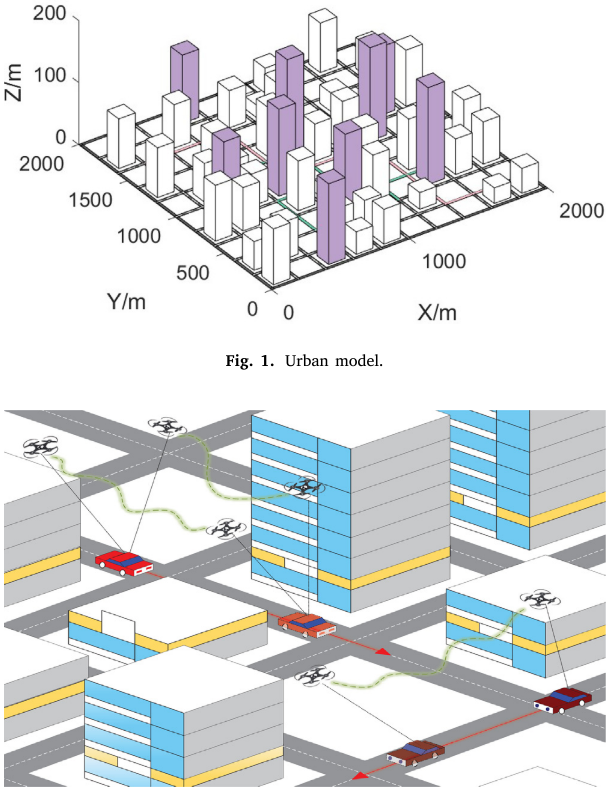
问题假设无人机同构,飞行高度一致;目标状态已知;建筑物高度已知。
无人机模型
四旋翼无人机模型:
{x˙ui=vicosψiy˙ui=visinψiz˙ui=0ψ˙i=ωiv˙i=−1τvvi+1τvuviω˙i=−1τωωi+1τωuωi\begin{cases} \dot{x}_{ui}=v_{i}\cos\psi_{i} \\ \dot{y}_{ui}=v_{i}\sin\psi_{i} \\ \dot{z}_{ui}=0 \\ \dot{\psi}_{i}=\omega_{i} \\ \dot{v}_{i}=-\frac{1}{\tau_{v}}v_{i}+\frac{1}{\tau_{v}}u_{vi} \\ \dot{\omega}_{i}=-\frac{1}{\tau_{\omega}}\omega_{i}+\frac{1}{\tau_{\omega}}u_{\omega i} & \end{cases} ⎩⎨⎧x˙ui=vicosψiy˙ui=visinψiz˙ui=0ψ˙i=ωiv˙i=−τv1vi+τv1uviω˙i=−τω1ωi+τω1uωi
目标模型
地面目标被视为一个以变化速度移动的理想点,离散模型表示为:
ζ⃗q(k+1)=Gζ⃗q(k)+e(k)\vec{\zeta}_q(k+1)=G\vec{\zeta}_q(k)+e(k) ζq(k+1)=Gζq(k)+e(k)
离散模型表示为目标状态的转移方程,包括位置、速度和加速度。状态转移矩阵和过程噪声用于描述目标状态的变化,且无人机具有相同的探测能力。
动态任务分配方法
无人机的任务分配是一个高度复杂的优化问题,需要在任务目标与任务执行相关的多重约束之间取得精细平衡。在实际应用中,将无人机分配给特定目标的标准本质上是动态的,并且取决于与无人机飞行路径相关的时变奖励函数。
max∑i=1N∑q=1Mtiq(k)fiq(k)s.t. ∑i=1Ntiq(k)≥1,∑q=1Mtiq(k)=1tiq(k)∈{0,1}fiq(k)∈Gf(k)i=1,2,…,N;q=1,2,…,M\begin{align*} \max & \sum_{i=1}^{N} \sum_{q=1}^{M} t_{iq}(k) f_{iq}(k) \\ \text{s.t. } & \sum_{i=1}^{N} t_{iq}(k) \geq 1, \quad \sum_{q=1}^{M} t_{iq}(k) = 1 \\ & t_{iq}(k) \in \{0,1\} \\ & f_{iq}(k) \in G_{f}(k) \\ & i = 1,2,\ldots,N; \quad q = 1,2,\ldots,M \end{align*} maxs.t. i=1∑Nq=1∑Mtiq(k)fiq(k)i=1∑Ntiq(k)≥1,q=1∑Mtiq(k)=1tiq(k)∈{0,1}fiq(k)∈Gf(k)i=1,2,…,N;q=1,2,…,M
奖励函数
为优化未来时间段内的跟踪性能,并最大化总奖励值,本模型引入了滚动时域优化框架。基于模糊目标规划与分布式模型预测控制方法,在预测时域内对三个关键目标进行模糊化。
目标覆盖度奖励
f1iq(k)=maxμς1iq(k)=minϱ1nPiq∗−Piqminf_1^{iq}(k)=\max\mu_{\varsigma_1^{iq}}(k)=\min\frac{\varrho_1^n}{P_{iq}^*-P_{iq}^{\min}} f1iq(k)=maxμς1iq(k)=minPiq∗−Piqminϱ1n
控制成本奖励
f2iq(k)=maxμζ2iq(k)=minϱ2puvmax+uwmax2−uv∗+uw∗2f_{2}^{iq}(k)=\max\mu_{\zeta_{2}^{iq}}(k)=\min\frac{\varrho_{2}^{p}}{\frac{u_{v}^{\max}+u_{w}^{\max}}{2}-\frac{u_{v}^{*}+u_{w}^{*}}{2}} f2iq(k)=maxμζ2iq(k)=min2uvmax+uwmax−2uv∗+uw∗ϱ2p
传感器能耗奖励
f3iq(k)=maxμζ3iq(k)=minϱ3n(1−DE)−1f_3^{iq}(k)=\max\mu_{\zeta_3^{iq}}(k)=\min\frac{\varrho_3^n}{\left(1-D^E\right)^{-1}} f3iq(k)=maxμζ3iq(k)=min(1−DE)−1ϱ3n
目标函数:
min13[ρ1nPiq∗−Piqmin+ρ2puvmax+uwmax2−uv∗+uw∗2+ρ3n(1−DE)−1]+λγiq(k)\min\frac{1}{3}\left[\frac{\rho_1^n}{P_{iq}^*-P_{iq}^{\min}}+\frac{\rho_2^p}{\frac{u_v^{\max}+u_w^{\max}}{2}-\frac{u_v^*+u_w^*}{2}}+\frac{\rho_3^n}{\left(1-D^E\right)^{-1}}\right]+\lambda\gamma_{iq}(k) min31[Piq∗−Piqminρ1n+2uvmax+uwmax−2uv∗+uw∗ρ2p+(1−DE)−1ρ3n]+λγiq(k)
3.二元混合粒子群算法
针对时变混合整数非线性规划这一求解难题,本文采用混合二进制粒子群优化算法(BHPSO)进行求解。在算法设计上,通过混合编码机制分别表示任务匹配关系(二进制变量)和控制输入(连续变量),并采用惩罚函数法将复杂约束条件转化为适应度函数中的惩罚项。当解方案违反避障、防撞、输入限制等关键约束时,惩罚项将自动增加,从而确保算法在追求目标函数最优的同时满足所有操作约束。
vad=va(d−1)+c1⋅rand()⋅(pad−xa(d−1))+c2⋅rand()⋅(pgd−xa(d−1))\begin{aligned} v_{ad} & =v_{a(d-1)}+c_{1}\cdot rand()\cdot(p_{ad}-x_{a(d-1)}) \\ & +c_{2}\cdot rand()\cdot(p_{gd}-x_{a(d-1)}) \end{aligned} vad=va(d−1)+c1⋅rand()⋅(pad−xa(d−1))+c2⋅rand()⋅(pgd−xa(d−1))
or{s(vad)=11+exp(−vad)xad={1ifrand()≤s(vad)0otherwise\begin{aligned} & \mathrm{or} \\ & \begin{cases} s(v_{ad})=\frac{1}{1+\exp(-v_{ad})} \\ x_{ad}= \begin{cases} 1 & ifrand()\leq s(v_{ad}) \\ 0 & otherwise & \end{cases} & \end{cases} \end{aligned} or⎩⎨⎧s(vad)=1+exp(−vad)1xad={10ifrand()≤s(vad)otherwise
4.结果展示
5.参考文献
[1] Hu C, Li Y, Qu G. Integrated dynamic task allocation via event-triggered for tracking ground moving targets by UAVs in urban[J]. Robotics and Autonomous Systems, 2025: 105061.
6.代码获取
xx
7.算法辅导·应用定制·读者交流
xx