[Computer Vision]实验七:图像检索
目录
一、实验内容
二、实验过程
2.1 准备数据集
2.2 SIFT特征提取
2.3 学习“视觉词典”(vision vocabulary)
2.4 建立图像索引并保存到数据库中
2.5 用一幅图像查询
三、实验小结
一、实验内容
- 实现基于颜色直方图、bag of word等方法的以图搜图,打印图片特征向量、图片相似度等
- 打印视觉词典大小、可视化部分特征基元、可视化部分图片的频率直方图
二、实验过程
2.1 准备数据集
如图1所示,这里准备的文件夹中含有100张实验图片。
2.2 SIFT特征提取
2.2.1 实验代码
import os
import cv2
import numpy as np
from PCV.tools.imtools import get_imlist
#获取图像列表
imlist = get_imlist(r'D:\Computer vision\20241217dataset')
nbr_images = len(imlist)
#生成特征文件路径
featlist = [os.path.splitext(imlist[i])[0] + '.sift' for i in range(nbr_images)]
#创建sift对象
sift = cv2.SIFT_create()
#提取sift特征并保存
for i in range(nbr_images):
try:
img = cv2.imread(imlist[i], cv2.IMREAD_GRAYSCALE)
if img is None:
raise ValueError(f"Image {imlist[i]} could not be read")
keypoints, descriptors = sift.detectAndCompute(img, None)
locs = np.array([[kp.pt[0], kp.pt[1], kp.size, kp.angle] for kp in keypoints])
np.savetxt(featlist[i], np.hstack((locs, descriptors)))
print(f"Processed {imlist[i]} to {featlist[i]}")
except Exception as e:
print(f"Failed to process {imlist[i]}: {e}")
#可视化sift特征
def visualize_sift_features(image_path, feature_path):
img = cv2.imread(image_path, cv2.IMREAD_GRAYSCALE)
if img is None:
raise ValueError(f"Image {image_path} could not be read")
features = np.loadtxt(feature_path)
locs = features[:, :4]
descriptors = features[:, 4:]
img_with_keypoints = cv2.drawKeypoints(img, [cv2.KeyPoint(x=loc[0], y=loc[1], _size=loc[2], _angle=loc[3]) for loc in locs], outImage=np.array([]))
plt.figure(figsize=(10, 10))
plt.imshow(img_with_keypoints, cmap='gray')
plt.title('SIFT Features Visualization')
plt.axis('off')
plt.show()
visualize_sift_features(imlist[0], featlist[0])2.2.2 结果展示
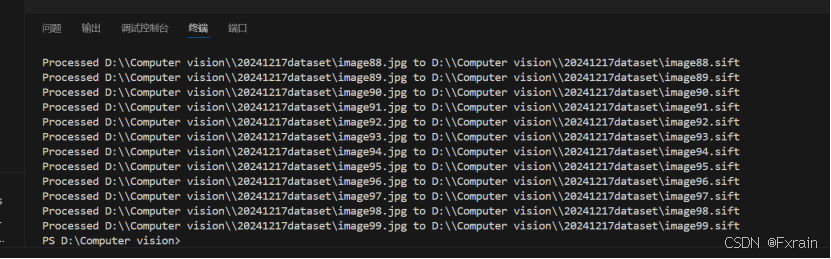
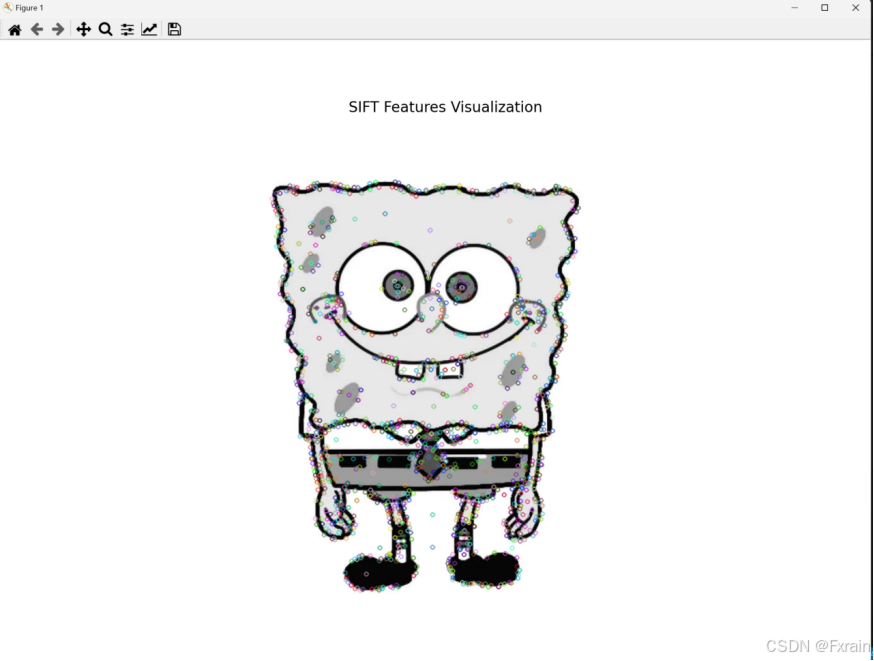
如图2所示,对文件夹中的所有图片使用sift特征描述子,图3展示了对第一个图像的SIFT特征的可视化。
2.3 学习“视觉词典”(vision vocabulary)
2.3.1 实验代码
(1)vocabulary.py文件
from numpy import *
from scipy.cluster.vq import *
from PCV.localdescriptors import sift
#构建视觉词汇表
class Vocabulary(object):
#初始化方法
def __init__(self,name):
self.name = name
self.voc = []
self.idf = []
self.trainingdata = []
self.nbr_words = 0
#训练过程
def train(self,featurefiles,k=100,subsampling=10):
nbr_images = len(featurefiles)
descr = []
descr.append(sift.read_features_from_file(featurefiles[0])[1])
descriptors = descr[0]
for i in arange(1,nbr_images):
descr.append(sift.read_features_from_file(featurefiles[i])[1])
descriptors = vstack((descriptors,descr[i]))
#使用K-means聚类生成视觉单词
self.voc,distortion = kmeans(descriptors[::subsampling,:],k,1)
self.nbr_words = self.voc.shape[0]
#生成视觉单词的直方图
imwords = zeros((nbr_images,self.nbr_words))
for i in range( nbr_images ):
imwords[i] = self.project(descr[i])
nbr_occurences = sum( (imwords > 0)*1 ,axis=0)
#计算每个视觉单词的逆文档频率
self.idf = log( (1.0*nbr_images) / (1.0*nbr_occurences+1) )
self.trainingdata = featurefiles
#投影方法
def project(self,descriptors):
imhist = zeros((self.nbr_words))
words,distance = vq(descriptors,self.voc)
for w in words:
imhist[w] += 1
return imhist
def get_words(self,descriptors):
return vq(descriptors,self.voc)[0]
(2)visual vocabulary.py文件
import pickle
from PCV.imagesearch import vocabulary
from PCV.tools.imtools import get_imlist
imlist = get_imlist(r'D:\Computer vision\20241217dataset')
nbr_images = len(imlist)
featlist = [imlist[i][:-3] + 'sift' for i in range(nbr_images)]
voc = vocabulary.Vocabulary('bof_test')
voc.train(featlist, 50, 10)
with open(r'D:\Computer vision\20241217dataset\vocabulary50.pkl', 'wb') as f:
pickle.dump(voc, f)
print('vocabulary is:', voc.name, voc.nbr_words)2.3.2 结果展示
如图4所示,打印视觉词典的名称和长度

2.4 建立图像索引并保存到数据库中
2.4.1 实验代码
(1)imagesearch.py文件
from numpy import *
import pickle
import sqlite3 as sqlite
from functools import cmp_to_key
class Indexer(object):
def __init__(self,db,voc):
self.con = sqlite.connect(db)
self.voc = voc
def __del__(self):
self.con.close()
def db_commit(self):
self.con.commit()
def get_id(self,imname):
cur = self.con.execute(
"select rowid from imlist where filename='%s'" % imname)
res=cur.fetchone()
if res==None:
cur = self.con.execute(
"insert into imlist(filename) values ('%s')" % imname)
return cur.lastrowid
else:
return res[0]
def is_indexed(self,imname):
im = self.con.execute("select rowid from imlist where filename='%s'" % imname).fetchone()
return im != None
def add_to_index(self,imname,descr):
if self.is_indexed(imname): return
print ('indexing', imname)
imid = self.get_id(imname)
imwords = self.voc.project(descr)
nbr_words = imwords.shape[0]
for i in range(nbr_words):
word = imwords[i]
self.con.execute("insert into imwords(imid,wordid,vocname) values (?,?,?)", (imid,word,self.voc.name))
self.con.execute("insert into imhistograms(imid,histogram,vocname) values (?,?,?)", (imid,pickle.dumps(imwords),self.voc.name))
def create_tables(self):
self.con.execute('create table imlist(filename)')
self.con.execute('create table imwords(imid,wordid,vocname)')
self.con.execute('create table imhistograms(imid,histogram,vocname)')
self.con.execute('create index im_idx on imlist(filename)')
self.con.execute('create index wordid_idx on imwords(wordid)')
self.con.execute('create index imid_idx on imwords(imid)')
self.con.execute('create index imidhist_idx on imhistograms(imid)')
self.db_commit()
def cmp_for_py3(a, b):
return (a > b) - (a < b)
class Searcher(object):
def __init__(self,db,voc):
self.con = sqlite.connect(db)
self.voc = voc
def __del__(self):
self.con.close()
def get_imhistogram(self, imname):
cursor = self.con.execute(
"select rowid from imlist where filename='%s'" % imname)
row = cursor.fetchone()
if row is None:
raise ValueError(f"No entry found in imlist for filename: {imname}")
im_id = row[0]
cursor = self.con.execute(
"select histogram from imhistograms where rowid=%d" % im_id)
s = cursor.fetchone()
if s is None:
raise ValueError(f"No histogram found for rowid: {im_id}")
return pickle.loads(s[0])
def candidates_from_word(self,imword):
im_ids = self.con.execute(
"select distinct imid from imwords where wordid=%d" % imword).fetchall()
return [i[0] for i in im_ids]
def candidates_from_histogram(self,imwords):
words = imwords.nonzero()[0]
candidates = []
for word in words:
c = self.candidates_from_word(word)
candidates+=c
tmp = [(w,candidates.count(w)) for w in set(candidates)]
tmp.sort(key=cmp_to_key(lambda x,y:cmp_for_py3(x[1],y[1])))
tmp.reverse()
return [w[0] for w in tmp]
def query(self, imname):
try:
h = self.get_imhistogram(imname)
except ValueError as e:
print(e)
return []
candidates = self.candidates_from_histogram(h)
matchscores = []
for imid in candidates:
cand_name = self.con.execute(
"select filename from imlist where rowid=%d" % imid).fetchone()
cand_h = self.get_imhistogram(cand_name)
cand_dist = sqrt(sum(self.voc.idf * (h - cand_h) ** 2))
matchscores.append((cand_dist, imid))
matchscores.sort()
return matchscores
def get_filename(self,imid):
s = self.con.execute(
"select filename from imlist where rowid='%d'" % imid).fetchone()
return s[0]
def tf_idf_dist(voc,v1,v2):
v1 /= sum(v1)
v2 /= sum(v2)
return sqrt( sum( voc.idf*(v1-v2)**2 ) )
def compute_ukbench_score(src,imlist):
nbr_images = len(imlist)
pos = zeros((nbr_images,4))
for i in range(nbr_images):
pos[i] = [w[1]-1 for w in src.query(imlist[i])[:4]]
score = array([ (pos[i]//4)==(i//4) for i in range(nbr_images)])*1.0
return sum(score) / (nbr_images)
from PIL import Image
from pylab import *
def plot_results(src,res):
figure()
nbr_results = len(res)
for i in range(nbr_results):
imname = src.get_filename(res[i])
subplot(1,nbr_results,i+1)
imshow(array(Image.open(imname)))
axis('off')
show()(2)quantizeSet.py文件
import pickle
from PCV.imagesearch import imagesearch
from PCV.localdescriptors import sift
import sqlite3
from PCV.tools.imtools import get_imlist
import cv2
import matplotlib.pyplot as plt
imlist = get_imlist(r'D:\Computer vision\20241217dataset')
nbr_images = len(imlist)
featlist = [imlist[i][:-3] + 'sift' for i in range(nbr_images)]
with open(r'D:\Computer vision\20241217dataset\vocabulary50.pkl', 'rb') as f:
voc = pickle.load(f)
indx = imagesearch.Indexer('D:\\Computer vision\\20241217CODES\\testImaAdd.db', voc)
indx.create_tables()
for i in range(nbr_images)[:100]:
locs, descr = sift.read_features_from_file(featlist[i])
indx.add_to_index(imlist[i], descr)
indx.db_commit()
con = sqlite3.connect('D:\\Computer vision\\20241217CODES\\testImaAdd.db')
print(con.execute('select count (filename) from imlist').fetchone())
print(con.execute('select * from imlist').fetchone())
searcher = imagesearch.Searcher('D:\\Computer vision\\20241217CODES\\testImaAdd.db', voc)
image_files = imlist[:5]
for image_file in image_files:
histogram = searcher.get_imhistogram(image_file)
plt.figure()
plt.title(image_file)
plt.bar(range(len(histogram)), histogram)
plt.xlabel('Word ID')
plt.ylabel('Frequency')
plt.show()2.4.2 结果展示
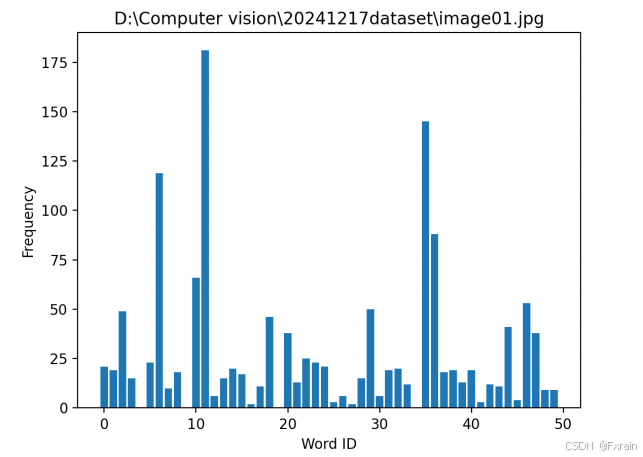
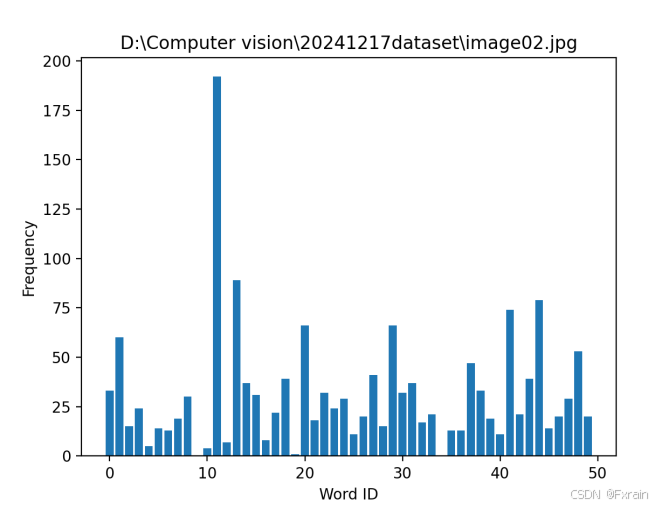
如图5所示,对数据集中的所有图像进行量化,为所有图像创建索引,再遍历所有的图像,将它们的特征投影到词汇上,最终提交到数据库保存下来(如图6)。图7、图8展示了部分图像的频率直方图。

2.5 用一幅图像查询
2.5.1 实验代码
import pickle
from PCV.imagesearch import imagesearch
from PCV.geometry import homography
from PCV.tools.imtools import get_imlist
import numpy as np
import cv2
import warnings
warnings.filterwarnings("ignore")
imlist = get_imlist(r'D:\Computer vision\20241217dataset')
nbr_images = len(imlist)
featlist = [imlist[i][:-3] + 'sift' for i in range(nbr_images)]
with open(r'D:\Computer vision\20241217dataset\vocabulary50.pkl', 'rb') as f:
voc = pickle.load(f, encoding='iso-8859-1')
src = imagesearch.Searcher(r'D:\Computer vision\20241217CODES\testImaAdd.db', voc)
q_ind = 3
nbr_results = 10
res_reg = [w[1] for w in src.query(imlist[q_ind])[:nbr_results]]
print('top matches (regular):', res_reg)
img = cv2.imread(imlist[q_ind])
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
sift = cv2.SIFT_create()
kp, q_descr = sift.detectAndCompute(gray, None)
q_locs = np.array([[kp[i].pt[0], kp[i].pt[1]] for i in range(len(kp))])
fp = homography.make_homog(q_locs[:, :2].T)
model = homography.RansacModel()
rank = {}
bf = cv2.BFMatcher()
for ndx in res_reg[1:]:
if ndx >= len(imlist):
print(f"Index {ndx} is out of range for imlist with length {len(imlist)}")
continue
img = cv2.imread(imlist[ndx])
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
kp, descr = sift.detectAndCompute(gray, None)
locs = np.array([[kp[i].pt[0], kp[i].pt[1]] for i in range(len(kp))])
matches = bf.knnMatch(q_descr, descr, k=2)
good_matches = []
for m, n in matches:
if m.distance < 0.75 * n.distance:
good_matches.append(m)
ind = [m.queryIdx for m in good_matches]
ind2 = [m.trainIdx for m in good_matches]
tp = homography.make_homog(locs[:, :2].T)
try:
H, inliers = homography.H_from_ransac(fp[:, ind], tp[:, ind2], model, match_theshold=4)
except:
inliers = []
# store inlier count
rank[ndx] = len(inliers)
sorted_rank = sorted(rank.items(), key=lambda t: t[1], reverse=True)
res_geom = [res_reg[0]] + [s[0] for s in sorted_rank]
print('top matches (homography):', res_geom)
def calculate_similarity(query_index, result_indices, imlist):
similarities = []
for res_index in result_indices:
if res_index >= len(imlist):
print(f"Index {res_index} is out of range for imlist with length {len(imlist)}")
continue
img1 = cv2.imread(imlist[query_index])
img2 = cv2.imread(imlist[res_index])
gray1 = cv2.cvtColor(img1, cv2.COLOR_BGR2GRAY)
gray2 = cv2.cvtColor(img2, cv2.COLOR_BGR2GRAY)
sift = cv2.SIFT_create()
kp1, des1 = sift.detectAndCompute(gray1, None)
kp2, des2 = sift.detectAndCompute(gray2, None)
bf = cv2.BFMatcher()
matches = bf.knnMatch(des1, des2, k=2)
good_matches = []
for m, n in matches:
if m.distance < 0.75 * n.distance:
good_matches.append(m)
similarity = len(good_matches) / min(len(kp1), len(kp2))
similarities.append((res_index, similarity))
return similarities
query_index = q_ind
result_indices = res_reg + res_geom
similarities = calculate_similarity(query_index, result_indices, imlist)
print("Similarity scores:")
for index, score in similarities:
print(f"Image {index}: {score:.4f}")
imagesearch.plot_results(src, res_reg)
imagesearch.plot_results(src, res_geom)
imagesearch.plot_results(src, res_reg[:6])
imagesearch.plot_results(src, res_geom[:6]) 2.5.2 结果展示
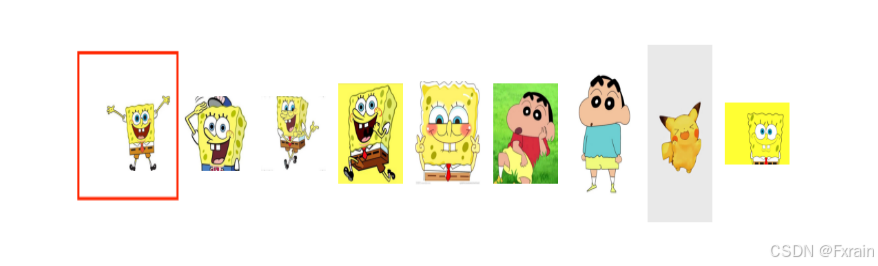
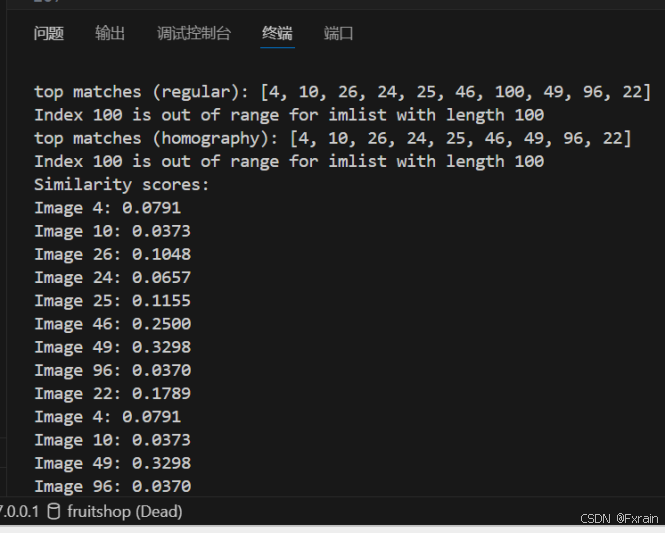
如图9所示,根据给定的查询图像索引q_ind,执行常规查询,返回前nbr_results个匹配结果,并打印这些结果以及可视化图片。

如图10所示,使用 RANSAC 模型拟合单应性找到与查询图像几何一致的候选图像。
如图11所示,计算查询图像与候选图像之间的相似度分数,并返回一个包含相似度分数的列表。
当生成不同维度视觉词典时,常规排序结果如图12所示。

三、实验小结
图像检索是一项重要的计算机视觉任务,它在根据用户的输入(如图像或关键词),从图像数据库中检索出最相关的图像。Bag of Feature 是一种图像特征提取方法,参考Bag of Words的思路,把每幅图像描述为一个局部区域/关键点(Patches/Key Points)特征的无序集合。同时从图像抽象出很多具有代表性的「关键词」,形成一个字典,再统计每张图片中出现的「关键词」数量,得到图片的特征向量。