线性代数 | 要义 / 本质 (下篇)
注:本文为 “线性代数 | 要义 / 本质” 相关合辑。
略排未全校,如有内容异常,请看原文。
稍后补上几张图……
- 线性代数 | 要义 / 本质 (上篇)-CSDN博客
https://blog.csdn.net/u013669912/article/details/153110982
【直观详解】线性代数的本质(下篇)
5 行列式的几何意义
The purpose of computation is insight, not numbers - Richard Hamming
计算的目的不在于数字本身,而在于洞察其背后的意义 ——理查德·汉明(没错,是发明汉明码的那个人)
5.1 行列式的定义
行列式是衡量线性变换对空间体积(面积 / 体积)缩放比例的指标,记为 det(A)\det (A)det(A) 或 ∣A∣|A|∣A∣。
-
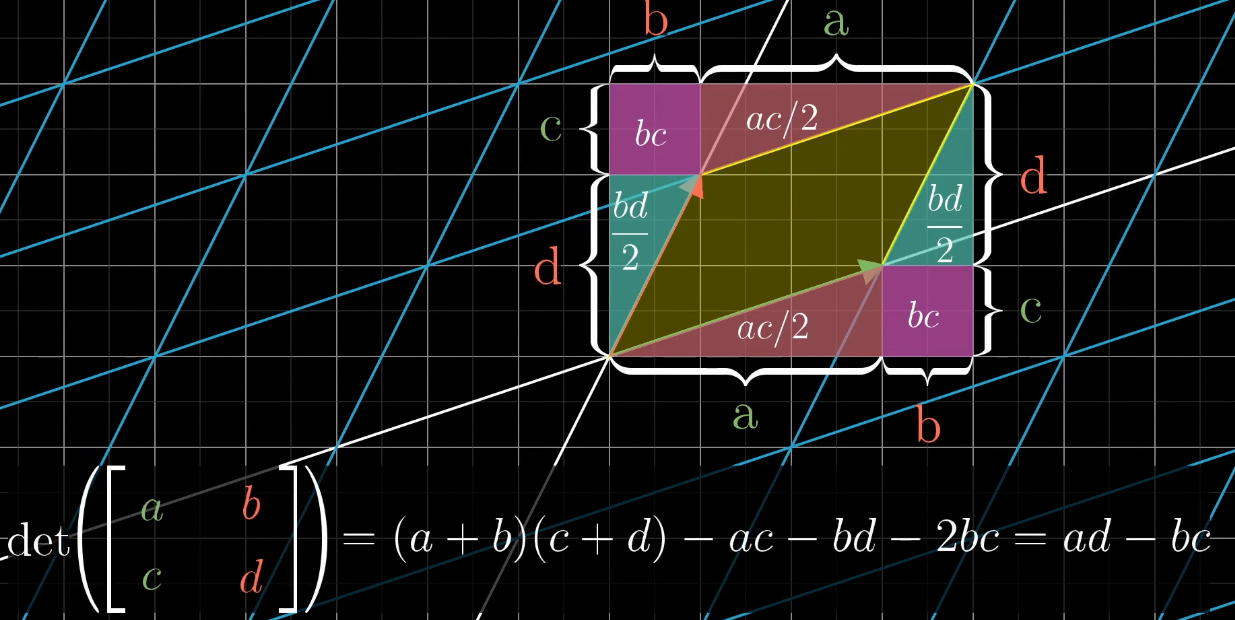
二维空间:对于矩阵 A=[abcd]A = \begin {bmatrix} a & b \\ c & d \end {bmatrix}A=[acbd],其行列式为 det(A)=ad−bc\det (A) = ad - bcdet(A)=ad−bc,几何意义是 “标准基 {ı^,ȷ^}\{\hat {\imath}, \hat {\jmath}\}{^,^} 构成的单位正方形,经 AAA 变换后形成的平行四边形的面积”;
-
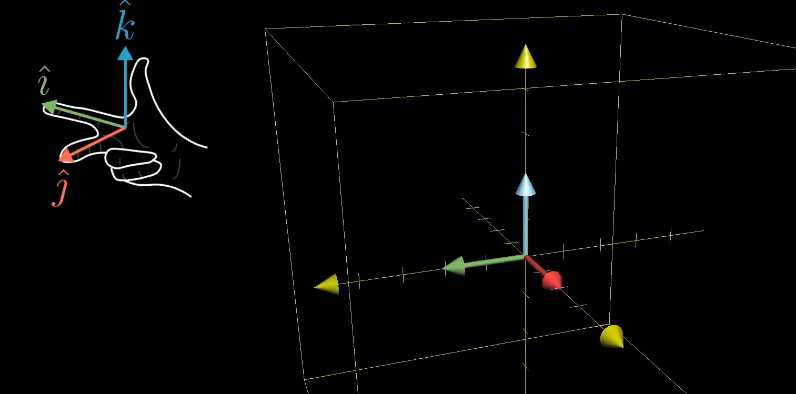
三维空间:对于矩阵 A=[abcdefghi]A = \begin {bmatrix} a & b & c \\ d & e & f \\ g & h & i \end {bmatrix}A=adgbehcfi,其行列式为 det(A)=a(ei−fh)−b(di−fg)+c(dh−eg)\det (A) = a (ei - fh) - b (di - fg) + c (dh - eg)det(A)=a(ei−fh)−b(di−fg)+c(dh−eg),几何意义是 “标准基 {ı^,ȷ^,k^}\{\hat {\imath}, \hat {\jmath}, \hat {k}\}{^,^,k^} 构成的单位立方体,经 AAA 变换后形成的平行六面体的体积”。
5.2 行列式的符号与降维
5.2.1 行列式的符号意义
行列式的正负表示线性变换是否改变空间的“定向”,具体判断方式随空间维度不同而变化:
- 二维空间:以单位向量 ı^\hat{\imath}^ 为参照,若 ȷ^\hat{\jmath}^ 经变换后从 ı^\hat{\imath}^ 的左侧转移至右侧(效果类似“纸的翻面”),则行列式为负;反之,ȷ^\hat{\jmath}^ 相对 ı^\hat{\imath}^ 方位不变,行列式为正。
- 三维空间:空间定向通过右手定则判断——右手四指沿 ı^→ȷ^→k^\hat{\imath} \to \hat{\jmath} \to \hat{k}^→^→k^ 顺序弯曲,大拇指指向为空间正定向。变换后定向方向相反,行列式为负;定向方向不变,行列式为正。
5.2.2 行列式与空间降维的关系
若矩阵 AAA 的行列式 det(A)=0\det(A) = 0det(A)=0,则该矩阵对应的线性变换会导致空间维度降低:
- 二维空间变换后降为直线;
- 三维空间变换后降为平面或直线。
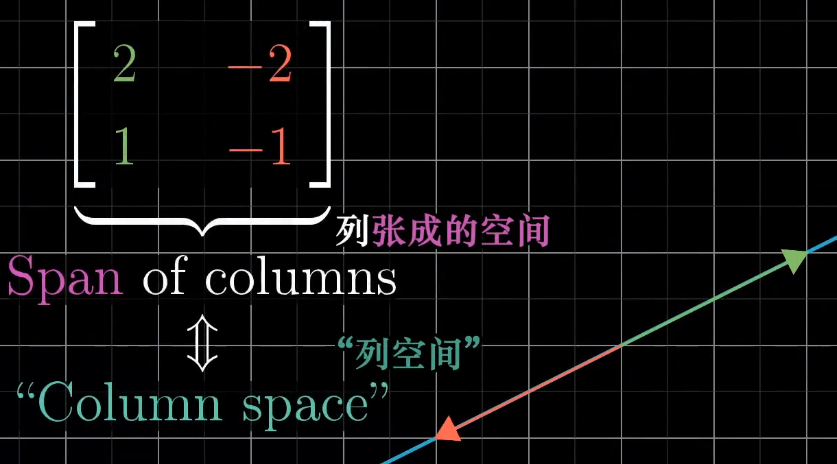
其本质是:det(A)=0\det(A) = 0det(A)=0 时,矩阵 AAA 的列向量线性相关,张成的空间维度小于矩阵阶数(如二阶矩阵列向量张成一维空间,三阶矩阵列向量张成二维或一维空间)。
5.2.3 线性变换的性质与行列式的作用
-
线性变换的基本性质:
线性变换保持图形的平行性,但改变图形的大小与方向;且不必然保持形状——仅旋转、反射等特殊线性变换保形,剪切变换等会改变图形形状。 -
行列式在二维线性变换中的作用:
行列式是描述矩阵缩放作用的标量值,可确定二维线性变换的两个关键结果:- 判断朝向变化:行列式为正,图形朝向不变;行列式为负,图形朝向反转。
- 确定面积缩放比例:行列式的绝对值等于面积缩放比例。绝对值为 1 时面积不变,大于 1 时面积放大,小于 1 时面积缩小。
5.3 行列式的重要性质
由几何意义可直接推导行列式的核心性质:
-
det(M1M2)=det(M1)det(M2)\det (M_1M_2) = \det (M_1)\det (M_2)det(M1M2)=det(M1)det(M2):复合变换的体积缩放比例等于各变换缩放比例的乘积;
-
det(A−1)=1det(A)\det (A^{-1}) = \frac {1}{\det (A)}det(A−1)=det(A)1:逆变换的缩放比例是原变换的倒数(若原变换放大 kkk 倍,逆变换缩小 1k\frac {1}{k}k1 倍);
-
det(kA)=kndet(A)\det (kA) = k^n\det (A)det(kA)=kndet(A):nnn 阶矩阵的数乘变换,体积缩放比例为 knk^nkn(二维:面积缩放 k2k^2k2,三维:体积缩放 k3k^3k3)。
行列式直观理解
行列式是矩阵的一个数值特征,为建立行列式计算公式与几何直观的联系,二阶矩阵 [abcd]\begin{bmatrix} a&b\\ c&d\end{bmatrix}[acbd] 的行列式,对应其列向量张成图形的有向面积:
-
当 b=c=0b = c = 0b=c=0 时,矩阵为 [a00d]\begin{bmatrix} a&0\\ 0&d\end{bmatrix}[a00d],aaa 是 i^\hat{i}i^ 在 xxx 轴的缩放比例,ddd 是 j^\hat{j}j^ 在 yyy 轴的缩放比例,行列式 adadad 是单位正方形按 aaa、ddd 拉伸后的面积(拉伸倍数)。
-
当 bbb、ccc 非 000 时,行列式 ad−bcad - bcad−bc 综合了 xxx、yyy 轴拉伸与图形“倾斜压缩”的效果,为变换后图形的有向面积(总缩放比例)。
6 逆矩阵、列空间与零空间
To ask the right question is harder than to answer it - Georg Cantor
提出正确的问题比回答它更难 ——格奥尔格·康托尔
6.1 线性方程组的几何意义
线性方程组的一般形式为 Ax⃗=v⃗A\vec {x} = \vec {v}Ax=v,其中 AAA 为 n×nn \times nn×n 矩阵,x⃗\vec {x}x 为待求向量,
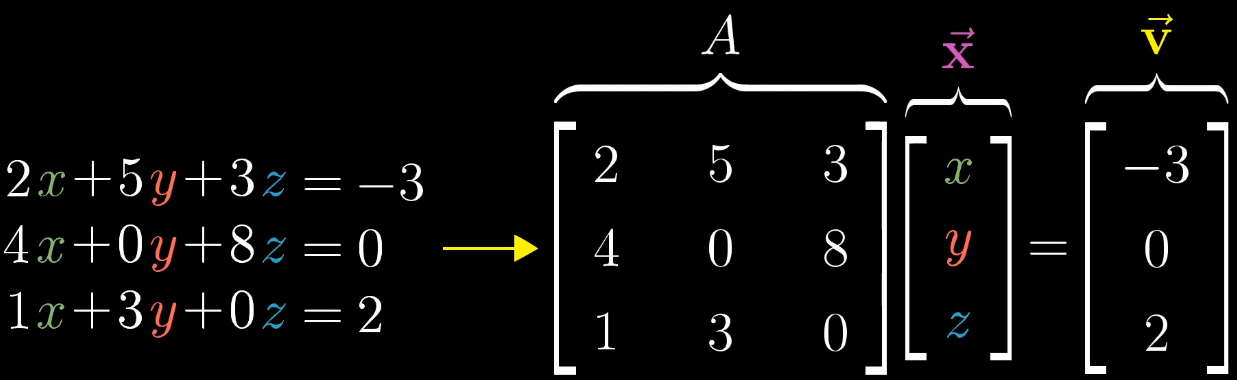
几何直观来翻译个公式即 Ax⃗A\vec {x}Ax 经过 AAA 矩阵变换后,恰好落在 v⃗\vec {v}v 上
从线性变换的角度,该方程的几何意义是:找到向量 x⃗\vec {x}x,使其经 AAA 变换后恰好等于 v⃗\vec {v}v。
6.2 逆矩阵与方程组求解
6.2.1 逆矩阵的定义
若存在矩阵 A−1A^{-1}A−1,使得 A−1A=IA^{-1} A = IA−1A=I(III 为单位矩阵,I=[1001]I = \begin {bmatrix} 1 & 0 \\ 0 & 1 \end {bmatrix}I=[1001](二维),I=[100010001]I = \begin {bmatrix} 1 & 0 & 0 \\ 0 & 1 & 0 \\ 0 & 0 & 1 \end {bmatrix}I=100010001(三维)),则称 A−1A^{-1}A−1 为 AAA 的逆矩阵。
- 几何意义:A−1A^{-1}A−1 对应的变换是 AAA 的 “逆操作”—— 若 AAA 将 x⃗\vec {x}x 变换为 v⃗\vec {v}v,则 A−1A^{-1}A−1 将 v⃗\vec {v}v 变换回 x⃗\vec {x}x。
6.2.2 线性方程组的解
在线性代数中,任意一个 m×nm \times nm×n 型线性方程组均可以表示为矩阵形式 Ax=vA\mathbf{x} = \mathbf{v}Ax=v,其中各符号的定义如下:
- A∈Rm×nA \in \mathbb{R}^{m \times n}A∈Rm×n:称为系数矩阵,由方程组中未知量的系数按原顺序构成;
- x∈Rn\mathbf{x} \in \mathbb{R}^nx∈Rn:称为未知向量,包含方程组中所有待求解的未知量;
- v∈Rm\mathbf{v} \in \mathbb{R}^mv∈Rm:称为常数项向量,由方程组等号右侧的常数项构成。
该矩阵形式的核心意义在于:线性方程组 Ax=vA\mathbf{x} = \mathbf{v}Ax=v 与从向量空间 Rn\mathbb{R}^nRn 到 Rm\mathbb{R}^mRm 的线性变换 TA:Rn→RmT_A: \mathbb{R}^n \to \mathbb{R}^mTA:Rn→Rm(定义为 TA(x)=AxT_A(\mathbf{x}) = A\mathbf{x}TA(x)=Ax)一一对应。这种对应关系将“求解方程组”转化为“分析线性变换的性质”,我们可从逆变换、列空间、零空间三个维度,系统讨论方程组解的存在性、唯一性及解集合的结构。
1. 逆变换与方程组的唯一解
当线性变换 TAT_ATA 满足“可逆”条件时,方程组 Ax=vA\mathbf{x} = \mathbf{v}Ax=v 存在唯一解,具体推导与结论如下:
1.1 可逆的等价条件
线性变换 TAT_ATA 可逆,等价于其对应的系数矩阵 AAA 满足两个条件:
- AAA 是方阵(即 m=nm = nm=n,方程组的“方程个数”等于“未知量个数”);
- AAA 的行列式非零(即 det(A)≠0\det(A) \neq 0det(A)=0,此时 AAA 称为可逆矩阵或非奇异矩阵)。
行列式非零的几何意义是:线性变换 TAT_ATA 不会导致向量空间“降维”(例如,R3\mathbb{R}^3R3 中的变换不会将向量映射到 R2\mathbb{R}^2R2 或更低维的空间),因此每个输出向量 v\mathbf{v}v 都能唯一对应一个输入向量 x\mathbf{x}x。
1.2 唯一解的代数形式
若 AAA 可逆,则其逆矩阵 A−1A^{-1}A−1 存在且唯一(满足 A−1A=AA−1=IA^{-1}A = AA^{-1} = IA−1A=AA−1=I,其中 III 为单位矩阵)。对 Ax=vA\mathbf{x} = \mathbf{v}Ax=v 两边同时左乘 A−1A^{-1}A−1,可通过矩阵运算直接求解 x\mathbf{x}x:
A−1Ax=A−1v⟹Ix=A−1v⟹x=A−1vA^{-1}A\mathbf{x} = A^{-1}\mathbf{v} \implies I\mathbf{x} = A^{-1}\mathbf{v} \implies \mathbf{x} = A^{-1}\mathbf{v} A−1Ax=A−1v⟹Ix=A−1v⟹x=A−1v
从线性变换的角度看,该解等价于“将逆变换 TA−1T_A^{-1}TA−1 作用于 v\mathbf{v}v”,即 x=TA−1(v)\mathbf{x} = T_A^{-1}(\mathbf{v})x=TA−1(v),这进一步印证了解的唯一性——逆变换的输出是唯一的。
2. 列空间与方程组的解的存在性
当 TAT_ATA 不可逆(或 AAA 非方阵)时,方程组 Ax=vA\mathbf{x} = \mathbf{v}Ax=v 未必有解,需通过系数矩阵 AAA 的列空间(Column Space)判定解的存在性。
2.1 列空间的定义
系数矩阵 AAA 的列空间(记为 Col(A)\text{Col}(A)Col(A))是 AAA 的所有列向量在 Rm\mathbb{R}^mRm 中通过“线性组合”张成的子空间。例如,若 A=[a1a2…an]A = [\mathbf{a}_1\ \mathbf{a}_2\ \dots\ \mathbf{a}_n]A=[a1 a2 … an](其中 ai∈Rm\mathbf{a}_i \in \mathbb{R}^mai∈Rm 是 AAA 的第 iii 列),则:
Col(A)={c1a1+c2a2+⋯+cnan∣c1,c2,…,cn∈R}\text{Col}(A) = \left\{ c_1\mathbf{a}_1 + c_2\mathbf{a}_2 + \dots + c_n\mathbf{a}_n \mid c_1, c_2, \dots, c_n \in \mathbb{R} \right\} Col(A)={c1a1+c2a2+⋯+cnan∣c1,c2,…,cn∈R}
其几何意义是:线性变换 TAT_ATA 的所有可能输出向量构成的集合,即 TAT_ATA 的“值域”。
2.2 解的存在性充要条件
根据列空间的定义,方程组 Ax=vA\mathbf{x} = \mathbf{v}Ax=v 有解的本质是“v\mathbf{v}v 属于 TAT_ATA 的值域”,因此可得到核心结论:
线性方程组 Ax=vA\mathbf{x} = \mathbf{v}Ax=v 有解的充要条件是:常数项向量 v\mathbf{v}v 属于系数矩阵 AAA 的列空间,即 v∈Col(A)\mathbf{v} \in \text{Col}(A)v∈Col(A)。
结合行列式的特殊情况(当 AAA 为方阵时):
- 若 det(A)≠0\det(A) \neq 0det(A)=0(AAA 可逆),则 Col(A)=Rm\text{Col}(A) = \mathbb{R}^mCol(A)=Rm(列空间充满整个目标空间),因此对任意 v∈Rm\mathbf{v} \in \mathbb{R}^mv∈Rm,方程组均有解(与第1节结论一致);
- 若 det(A)=0\det(A) = 0det(A)=0(AAA 不可逆),则 Col(A)\text{Col}(A)Col(A) 是 Rm\mathbb{R}^mRm 的真子空间(维度低于 mmm),此时仅当 v\mathbf{v}v 落在该真子空间内时,方程组有解,否则无解。
3. 零空间与方程组的解集合结构
当方程组 Ax=vA\mathbf{x} = \mathbf{v}Ax=v 有解时,解的个数可能是“唯一”或“无穷多”,需通过系数矩阵 AAA 的零空间(Null Space)刻画解集合的完整结构。
3.1 零空间的定义
系数矩阵 AAA 的零空间(记为 Nul(A)\text{Nul}(A)Nul(A))是齐次线性方程组 Ax=0A\mathbf{x} = \mathbf{0}Ax=0(常数项向量全为0的方程组)的所有解向量在 Rn\mathbb{R}^nRn 中构成的子空间,即:
Nul(A)={z∈Rn∣Az=0}\text{Nul}(A) = \left\{ \mathbf{z} \in \mathbb{R}^n \mid A\mathbf{z} = \mathbf{0} \right\} Nul(A)={z∈Rn∣Az=0}
齐次方程组 Ax=0A\mathbf{x} = \mathbf{0}Ax=0 始终有解(至少存在零解 x=0\mathbf{x} = \mathbf{0}x=0),因此零空间 Nul(A)\text{Nul}(A)Nul(A) 永远非空。
3.2 解集合的结构定理
设非齐次方程组 Ax=vA\mathbf{x} = \mathbf{v}Ax=v 有解,且 x0\mathbf{x}_0x0 是其任意一个特解(即满足 Ax0=vA\mathbf{x}_0 = \mathbf{v}Ax0=v 的某个固定解),则方程组的所有解可表示为“特解 + 零空间中任意向量”的形式,即:
x=x0+z,其中 z∈Nul(A)\mathbf{x} = \mathbf{x}_0 + \mathbf{z}, \quad \text{其中 } \mathbf{z} \in \text{Nul}(A) x=x0+z,其中 z∈Nul(A)
该定理的逻辑验证如下:
-
解的有效性:若 z∈Nul(A)\mathbf{z} \in \text{Nul}(A)z∈Nul(A),则 Az=0A\mathbf{z} = \mathbf{0}Az=0,因此 A(x0+z)=Ax0+Az=v+0=vA(\mathbf{x}_0 + \mathbf{z}) = A\mathbf{x}_0 + A\mathbf{z} = \mathbf{v} + \mathbf{0} = \mathbf{v}A(x0+z)=Ax0+Az=v+0=v,即 x0+z\mathbf{x}_0 + \mathbf{z}x0+z 是方程组的解;
-
解的完整性:设 x\mathbf{x}x 是方程组的任意一个解,则 A(x−x0)=Ax−Ax0=v−v=0A(\mathbf{x} - \mathbf{x}_0) = A\mathbf{x} - A\mathbf{x}_0 = \mathbf{v} - \mathbf{v} = \mathbf{0}A(x−x0)=Ax−Ax0=v−v=0,即 x−z∈Nul(A)\mathbf{x} - \mathbf{z} \in \text{Nul}(A)x−z∈Nul(A),因此 x\mathbf{x}x 可表示为 x0+(x−x0)\mathbf{x}_0 + (\mathbf{x} - \mathbf{x}_0)x0+(x−x0),符合上述形式。
3.3 特殊情况的解集合
根据上述定理,可进一步明确两类典型方程组的解集合:
- 非齐次方程组 Ax=vA\mathbf{x} = \mathbf{v}Ax=v:
- 若 v∉Col(A)\mathbf{v} \notin \text{Col}(A)v∈/Col(A):解集合为空集(无解);
- 若 v∈Col(A)\mathbf{v} \in \text{Col}(A)v∈Col(A):解集合为 {x0+z∣z∈Nul(A)}\left\{ \mathbf{x}_0 + \mathbf{z} \mid \mathbf{z} \in \text{Nul}(A) \right\}{x0+z∣z∈Nul(A)}(无穷多解,除非 Nul(A)={0}\text{Nul}(A) = \left\{ \mathbf{0} \right\}Nul(A)={0},即零空间仅含零向量,此时解唯一)。
- 齐次方程组 Ax=0A\mathbf{x} = \mathbf{0}Ax=0:
- 特解 x0=0\mathbf{x}_0 = \mathbf{0}x0=0(零解),因此解集合就是零空间 Nul(A)\text{Nul}(A)Nul(A);
- 若 Nul(A)={0}\text{Nul}(A) = \left\{ \mathbf{0} \right\}Nul(A)={0},则仅有零解;若 Nul(A)\text{Nul}(A)Nul(A) 维度大于0,则有无穷多非零解。
6.3 列空间(Column Space)
矩阵 AAA 的列空间是其所有列向量张成的空间,记为 C(A)C (A)C(A)。
- 几何意义:列空间是线性变换 AAA 的 “所有可能输出向量” 的集合(即 Ax⃗A\vec {x}Ax 的所有可能结果);
- 维度与秩:列空间的维度称为矩阵的秩(记为 rank(A)\text {rank}(A)rank(A))。对于 n×nn \times nn×n 矩阵,若 rank(A)=n\text {rank}(A) = nrank(A)=n(满秩),则列空间是整个 nnn 维空间;若 rank(A)<n\text {rank}(A) < nrank(A)<n(降秩),则列空间是 nnn 维空间的一个子空间(如二维中的直线、三维中的平面)。
重要性质:零向量 0⃗\vec {0}0 一定在列空间中(令 x⃗=0⃗\vec {x} = \vec {0}x=0,则 A0⃗=0⃗A\vec {0} = \vec {0}A0=0)。
6.4 零空间(Null Space)
所有经过该矩阵变换后落在原点的向量的集合,称为该矩阵(再次强调,矩阵是变换的数字表达)的零空间或核。
图 1 二维空间压缩到一条直线(一维),其中一条直线(一维)上的点被压缩到原点。
图 2 三维空间压缩到一个平面(二维),其中一条直线(一维)上的点被压缩到原点。
图 3 三维空间压缩到一条直线(一维),其中一个平面(二维)上的点被压缩到原点。
注意: 线性压缩是一种线性变换,而矩阵是线性变换在给定基下的代数表示(数字表达),二者一一对应但并非等同。
矩阵 AAA 的零空间是满足 Ax⃗=0⃗A\vec {x} = \vec {0}Ax=0 的所有向量 x⃗\vec {x}x 的集合,记为 N(A)N (A)N(A)。
- 几何意义:零空间是线性变换 AAA 中 “被压缩到原点的向量” 的集合;
- 维度关系(秩 - 零定理):对于 n×nn \times nn×n 矩阵,rank(A)+dim(N(A))=n\text {rank}(A) + \dim (N (A)) = nrank(A)+dim(N(A))=n(列空间维度与零空间维度之和等于矩阵的阶数)。
示例:
- 若 AAA 是 2×22 \times 22×2 矩阵且 det(A)=0\det (A) = 0det(A)=0(二维→一维),则零空间是一条直线(所有被压缩到原点的向量构成的直线);
- 若 AAA 是 3×33 \times 33×3 矩阵且 rank(A)=2\text {rank}(A) = 2rank(A)=2(三维→二维),则零空间是一条直线(dim(N(A))=3−2=1\dim (N (A)) = 3 - 2 = 1dim(N(A))=3−2=1)。
6.4.1 秩-零化度定理
零化度(Nullity)是线性代数中矩阵零空间的维数,是衡量矩阵“将向量映射为零向量”能力的重要指标。
- 零空间(Null Space,又称核空间 Kernel):指矩阵 A∈Rm×nA \in \mathbb{R}^{m \times n}A∈Rm×n 的所有解向量 x∈Rn\mathbf{x} \in \mathbb{R}^nx∈Rn 的集合,即 N(A)={x∈Rn∣Ax=0}\text{N}(A) = \{\mathbf{x} \in \mathbb{R}^n \mid A\mathbf{x} = \mathbf{0}\}N(A)={x∈Rn∣Ax=0}。
- 零化度的本质:零空间作为一个向量空间,其维数即为零化度(记为 nullity(A)\text{nullity}(A)nullity(A)),等价于零空间中“极大线性无关组的向量个数”(即零空间的基向量数)。
- 零化度的计算:通过对矩阵 AAA 做初等行变换化为行最简形,解线性方程组 Ax=0A\mathbf{x} = \mathbf{0}Ax=0 得到自由变量的个数,该个数即为零化度(自由变量数 = 零空间维数)。
对任意 m×nm \times nm×n 矩阵 AAA,其列空间的维数(即秩 rank(A)\text{rank}(A)rank(A))与零空间的维数(零化度)之和,等于矩阵的列数 nnn,即:
dim(Col(A))+dim(Nul(A))=n\dim(\text{Col}(A)) + \dim(\text{Nul}(A)) = ndim(Col(A))+dim(Nul(A))=n
注意:是“维数之和”,而非“空间本身相加”——列空间(Rm\mathbb{R}^mRm 子空间)与零空间(Rn\mathbb{R}^nRn 子空间)维度可能不同,无法直接叠加。
6.4.2 满秩与列空间、零空间
“满秩”是矩阵的属性(rank(A)=min(m,n)\text{rank}(A) = \min(m, n)rank(A)=min(m,n)),结合上述定理分析:
- 若 AAA 为 n×nn \times nn×n 方阵(满秩即 rank(A)=n\text{rank}(A) = nrank(A)=n):
由定理得 dim(Nul(A))=0\dim(\text{Nul}(A)) = 0dim(Nul(A))=0(零空间仅含零向量),且列空间 Col(A)=Rn\text{Col}(A) = \mathbb{R}^nCol(A)=Rn(满维子空间)。 - 若 AAA 为长方阵(如 m<nm < nm<n 时满秩即 rank(A)=m\text{rank}(A) = mrank(A)=m):
列空间 Col(A)=Rm\text{Col}(A) = \mathbb{R}^mCol(A)=Rm(满维),零空间维数 n−m>0n - m > 0n−m>0(含非零解)。
7 非方阵的几何意义
On this quiz, I asked you to find the determinant of a 2*3 matrix. Some of you, to my great amusement, actually tried to do this - no name listed
在这个小测试里,我让你们求一个 2*3 矩阵的行列式。让我感到非常可笑的是,你们当中竟然有人尝试去做 ——佚名
7.1 非方阵的维度映射
非方阵(如 m×nm \times nm×n 矩阵,m≠nm \neq nm=n)对应的线性变换是不同维度空间之间的映射:
- m×nm \times nm×n 矩阵:将 nnn 维输入空间映射到 mmm 维输出空间;
- 示例:3×23 \times 23×2 矩阵将二维空间映射到三维空间(输入为 222 维向量,输出为 333 维向量),其列向量是二维标准基 {ı^,ȷ^}\{\hat {\imath}, \hat {\jmath}\}{^,^} 在三维空间中的变换结果。
7.2 非方阵乘法的条件
两个非方阵 M1M_1M1(p×qp \times qp×q)与 M2M_2M2(q×rq \times rq×r)可相乘的充要条件是:前一个矩阵的列数等于后一个矩阵的行数(即 M1M_1M1 的输入维度等于 M2M_2M2 的输出维度),乘积矩阵 M=M1M2M = M_1M_2M=M1M2 的维度为 p×rp \times rp×r。
- 几何意义:M2M_2M2 将 rrr 维空间映射到 qqq 维空间,M1M_1M1 再将 qqq 维空间映射到 ppp 维空间,复合变换的输入维度为 rrr,输出维度为 ppp,与乘积矩阵维度一致。
7.3 非方阵的行列式
非方阵不存在行列式,因为行列式的核心是 “体积缩放比例”,而不同维度空间之间的映射(如二维→三维)无法定义 “体积比”(二维空间的 “面积” 与三维空间的 “体积” 单位不同,无直接比例关系)。
8 点积与对偶性
8.1 点积的定义与几何意义
8.1.1 代数定义
对于 nnn 维向量 v⃗=[v1v2⋯vn]\vec {v} = \begin {bmatrix} v_1 \\ v_2 \\ \cdots \\ v_n \end {bmatrix}v=v1v2⋯vn 与 w⃗=[w1w2⋯wn]\vec {w} = \begin {bmatrix} w_1 \\ w_2 \\ \cdots \\ w_n \end {bmatrix}w=w1w2⋯wn,其点积为:
v⃗⋅w⃗=v1w1+v2w2+⋯+vnwn\vec {v} \cdot \vec {w} = v_1w_1 + v_2w_2 + \cdots + v_nw_n v⋅w=v1w1+v2w2+⋯+vnwn
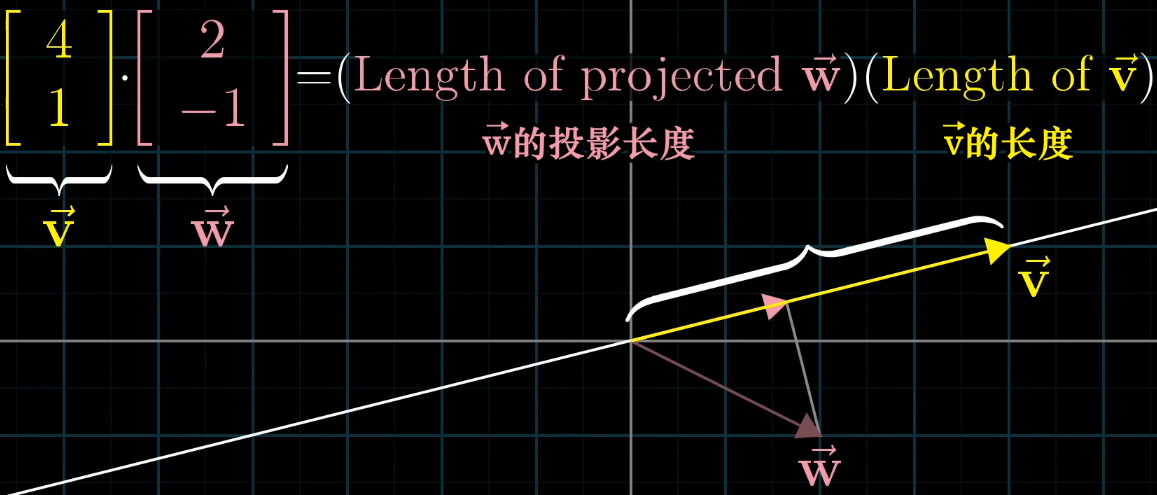
8.1.2 几何意义
点积的几何意义是 “一个向量在另一个向量上的投影长度与被投影向量长度的乘积”,即:
v⃗⋅w⃗=∥v⃗∥⋅∥w⃗∥⋅cosθ\vec {v} \cdot \vec {w} = \|\vec {v}\| \cdot \|\vec {w}\| \cdot \cos\theta v⋅w=∥v∥⋅∥w∥⋅cosθ
其中 θ\thetaθ 是 v⃗\vec {v}v 与 w⃗\vec {w}w 的夹角,∥v⃗∥=v12+v22+⋯+vn2\|\vec {v}\| = \sqrt {v_1^2 + v_2^2 + \cdots + v_n^2}∥v∥=v12+v22+⋯+vn2 是 v⃗\vec {v}v 的长度(模)。
- 符号含义:cosθ>0\cos\theta > 0cosθ>0(θ<90∘\theta < 90^\circθ<90∘)时,点积为正;cosθ<0\cos\theta < 0cosθ<0(θ>90∘\theta > 90^\circθ>90∘)时,点积为负;cosθ=0\cos\theta = 0cosθ=0(θ=90∘\theta = 90^\circθ=90∘)时,点积为 000(两向量垂直)。
8.2 点积的交换律
点积满足交换律:v⃗⋅w⃗=w⃗⋅v⃗\vec {v} \cdot \vec {w} = \vec {w} \cdot \vec {v}v⋅w=w⋅v,几何解释如下:
- 若 ∥v⃗∥=∥w⃗∥\|\vec {v}\| = \|\vec {w}\|∥v∥=∥w∥,则 v⃗\vec {v}v 在 w⃗\vec {w}w 上的投影长度等于 w⃗\vec {w}w 在 v⃗\vec {v}v 上的投影长度,乘积相等;
- 若 ∥v⃗∥≠∥w⃗∥\|\vec {v}\| \neq \|\vec {w}\|∥v∥=∥w∥,设 v⃗\vec {v}v 的长度为 k∥w⃗∥k\|\vec {w}\|k∥w∥,则 v⃗\vec {v}v 在 w⃗\vec {w}w 上的投影长度为 kkk 倍 w⃗\vec {w}w 在 v⃗\vec {v}v 上的投影长度,乘积仍相等(如 v⃗=2u⃗\vec {v} = 2\vec {u}v=2u,则 2u⃗⋅w⃗=2(u⃗⋅w⃗)=w⃗⋅2u⃗2\vec {u} \cdot \vec {w} = 2 (\vec {u} \cdot \vec {w}) = \vec {w} \cdot 2\vec {u}2u⋅w=2(u⋅w)=w⋅2u)。
8.3 对偶性:点积与线性变换的对应
8.3.1 多维到一维的线性变换
1×n1 \times n1×n 矩阵(行向量)对应的线性变换是将 nnn 维空间映射到一维空间(数轴)。
例如,1×21 \times 21×2 矩阵 [ab]\begin {bmatrix} a & b \end {bmatrix}[ab] 对二维向量 [xy]\begin {bmatrix} x \\ y \end {bmatrix}[xy] 的变换结果为 ax+byax + byax+by,这与点积 [ab]⋅[xy]\begin {bmatrix} a \\ b \end {bmatrix} \cdot \begin {bmatrix} x \\ y \end {bmatrix}[ab]⋅[xy] 完全一致。
8.3.2 对偶性的定义
对偶性是指 “多维到一维的线性变换” 与 “该空间中的向量” 之间的一一对应关系:
- 对于任意 nnn 维到一维的线性变换 L(x⃗)L (\vec {x})L(x),存在唯一的 nnn 维向量 u⃗\vec {u}u,使得 L(x⃗)=u⃗⋅x⃗L (\vec {x}) = \vec {u} \cdot \vec {x}L(x)=u⋅x;
- 反之,任意 nnn 维向量 u⃗\vec {u}u 都可定义一个 nnn 维到一维的线性变换 L(x⃗)=u⃗⋅x⃗L (\vec {x}) = \vec {u} \cdot \vec {x}L(x)=u⋅x。
几何解释:设 u⃗\vec {u}u 是一维空间(数轴)的单位向量,L(x⃗)L (\vec {x})L(x) 是 x⃗\vec {x}x 在 u⃗\vec {u}u 所在数轴上的投影长度,则 L(x⃗)=u⃗⋅x⃗L (\vec {x}) = \vec {u} \cdot \vec {x}L(x)=u⋅x(投影长度等于 x⃗\vec {x}x 与单位向量 u⃗\vec {u}u 的点积)。
9 叉积的本质
9.1 二维叉积(类比)
二维空间中,向量 v⃗=[v1v2]\vec {v} = \begin {bmatrix} v_1 \\ v_2 \end {bmatrix}v=[v1v2] 与 w⃗=[w1w2]\vec {w} = \begin {bmatrix} w_1 \\ w_2 \end {bmatrix}w=[w1w2] 的叉积(类比定义)为:
v⃗×w⃗=v1w2−v2w1\vec {v} \times \vec {w} = v_1w_2 - v_2w_1 v×w=v1w2−v2w1
- 几何意义:二维叉积的绝对值等于 v⃗\vec {v}v 与 w⃗\vec {w}w 张成的平行四边形的面积,符号表示 w⃗\vec {w}w 相对于 v⃗\vec {v}v 的旋转方向(逆时针为正,顺时针为负)。
9.2 三维叉积的定义
三维空间中,向量 v⃗=[v1v2v3]\vec {v} = \begin {bmatrix} v_1 \\ v_2 \\ v_3 \end {bmatrix}v=v1v2v3 与 w⃗=[w1w2w3]\vec {w} = \begin {bmatrix} w_1 \\ w_2 \\ w_3 \end {bmatrix}w=w1w2w3 的叉积是一个新的三维向量 p⃗=v⃗×w⃗\vec {p} = \vec {v} \times \vec {w}p=v×w,其定义为:
v⃗×w⃗=det([ı^v1w1ȷ^v2w2k^v3w3])=ı^(v2w3−v3w2)−ȷ^(v1w3−v3w1)+k^(v1w2−v2w1)\begin{aligned} \vec {v} \times \vec {w} &= \det\left ( \begin {bmatrix} \hat {\imath} & v_1 & w_1 \\ \hat {\jmath} & v_2 & w_2 \\ \hat {k} & v_3 & w_3 \end {bmatrix} \right) \\&= \hat {\imath}(v_2w_3 - v_3w_2) - \hat {\jmath}(v_1w_3 - v_3w_1) + \hat {k}(v_1w_2 - v_2w_1)\end{aligned} v×w=det^^k^v1v2v3w1w2w3=^(v2w3−v3w2)−^(v1w3−v3w1)+k^(v1w2−v2w1)
9.2.1 三维叉积的几何性质
1.长度:∥v⃗×w⃗∥=∥v⃗∥⋅∥w⃗∥⋅sinθ\|\vec {v} \times \vec {w}\| = \|\vec {v}\| \cdot \|\vec {w}\| \cdot \sin\theta∥v×w∥=∥v∥⋅∥w∥⋅sinθ,其中 θ\thetaθ 是 v⃗\vec {v}v 与 w⃗\vec {w}w 的夹角,几何意义是 v⃗\vec {v}v 与 w⃗\vec {w}w 张成的平行四边形的面积;
2.方向:p⃗\vec {p}p 与 v⃗\vec {v}v、w⃗\vec {w}w 均垂直,方向由右手定则确定(右手四指沿 v⃗→w⃗\vec {v} \to \vec {w}v→w 方向弯曲,大拇指指向即为 p⃗\vec {p}p 的方向)。
9.3 叉积与对偶性
三维叉积可通过 “对偶性” 理解:
- 定义三维到一维的线性变换 L(x⃗)=det([x1v1w1x2v2w2x3v3w3])L (\vec {x}) = \det\left ( \begin {bmatrix} x_1 & v_1 & w_1 \\ x_2 & v_2 & w_2 \\ x_3 & v_3 & w_3 \end {bmatrix} \right)L(x)=detx1x2x3v1v2v3w1w2w3,其中 x⃗=[x1x2x3]\vec {x} = \begin {bmatrix} x_1 \\ x_2 \\ x_3 \end {bmatrix}x=x1x2x3,该变换的几何意义是 “x⃗\vec {x}x、v⃗\vec {v}v、w⃗\vec {w}w 张成的平行六面体的体积”;
- 根据对偶性,存在唯一向量 p⃗\vec {p}p,使得 L(x⃗)=p⃗⋅x⃗L (\vec {x}) = \vec {p} \cdot \vec {x}L(x)=p⋅x,该 p⃗\vec {p}p 即为 v⃗×w⃗\vec {v} \times \vec {w}v×w;
- 由点积的几何意义,p⃗\vec {p}p 需与 v⃗\vec {v}v、w⃗\vec {w}w 垂直(否则 x⃗\vec {x}x 在 p⃗\vec {p}p 上的投影会受 v⃗\vec {v}v、w⃗\vec {w}w 方向影响,无法对应体积),且长度等于 v⃗\vec {v}v 与 w⃗\vec {w}w 张成的平行四边形的面积(体积 = 底面积 × 高,高为 x⃗\vec {x}x 在 p⃗\vec {p}p 上的投影长度)。
10 基变换与坐标转换
10.1 基的定义与坐标表示
设 {b1⃗,b2⃗,⋯,bn⃗}\{\vec {b_1}, \vec {b_2}, \cdots, \vec {b_n}\}{b1,b2,⋯,bn} 是 nnn 维空间的一组基,任意向量 x⃗\vec {x}x 可唯一表示为:
x⃗=c1b1⃗+c2b2⃗+⋯+cnbn⃗\vec {x} = c_1\vec {b_1} + c_2\vec {b_2} + \cdots + c_n\vec {b_n} x=c1b1+c2b2+⋯+cnbn
其中 [c1c2⋯cn]\begin {bmatrix} c_1 \\ c_2 \\ \cdots \\ c_n \end {bmatrix}c1c2⋯cn 称为 x⃗\vec {x}x 在基 {b1⃗,⋯,bn⃗}\{\vec {b_1}, \cdots, \vec {b_n}\}{b1,⋯,bn} 下的坐标。
10.1.2 标准基与非标准基的转换
设标准基为 {ı^,ȷ^}\{\hat {\imath}, \hat {\jmath}\}{^,^}(二维),非标准基为 {b1⃗,b2⃗}\{\vec {b_1}, \vec {b_2}\}{b1,b2},其中 b1⃗=[21]\vec {b_1} = \begin {bmatrix} 2 \\ 1 \end {bmatrix}b1=[21],b2⃗=[−11]\vec {b_2} = \begin {bmatrix} -1 \\ 1 \end {bmatrix}b2=[−11](用标准基表示)。
- 基变换矩阵:将非标准基向量作为列构成矩阵 T=[2−111]T = \begin {bmatrix} 2 & -1 \\ 1 & 1 \end {bmatrix}T=[21−11],称为 “从非标准基到标准基的转换矩阵”;
- 坐标转换:若 x⃗\vec {x}x 在非标准基下的坐标为 [c1c2]\begin {bmatrix} c_1 \\ c_2 \end {bmatrix}[c1c2],则其在标准基下的坐标为 [x1x2]=T[c1c2]\begin {bmatrix} x_1 \\ x_2 \end {bmatrix} = T\begin {bmatrix} c_1 \\ c_2 \end {bmatrix}[x1x2]=T[c1c2];
- 逆转换:若已知 x⃗\vec {x}x 在标准基下的坐标,其在非标准基下的坐标为 [c1c2]=T−1[x1x2]\begin {bmatrix} c_1 \\ c_2 \end {bmatrix} = T^{-1}\begin {bmatrix} x_1 \\ x_2 \end {bmatrix}[c1c2]=T−1[x1x2],其中 T−1T^{-1}T−1 是 TTT 的逆矩阵。
10.2 线性变换在不同基下的矩阵
设线性变换 LLL 在标准基下的矩阵为 MMM,在非标准基 {b1⃗,b2⃗}\{\vec {b_1}, \vec {b_2}\}{b1,b2} 下的矩阵为 M′M'M′,则 M′M'M′ 与 MMM 的关系为:
M′=T−1MTM' = T^{-1} MT M′=T−1MT
其中 TTT 是从非标准基到标准基的转换矩阵。
10.2.2 几何意义
- TTT:将非标准基下的坐标转换为标准基下的坐标;
- MMM:在标准基下应用线性变换;
- T−1T^{-1}T−1:将标准基下的变换结果转换回非标准基下的坐标;
- 整体效果:M′M'M′ 描述了同一线性变换在非标准基下的数字表达。
示例:设 LLL 是 “左旋转 90∘90^\circ90∘” 的变换,标准基下的矩阵 M=[0−110]M = \begin {bmatrix} 0 & -1 \\ 1 & 0 \end {bmatrix}M=[01−10],非标准基转换矩阵 T=[2−111]T = \begin {bmatrix} 2 & -1 \\ 1 & 1 \end {bmatrix}T=[21−11],则非标准基下的变换矩阵为:
M′=T−1MT=13[11−12]×[0−110]×[2−111]=[13−1323−1]M' = T^{-1} MT = \frac {1}{3}\begin {bmatrix} 1 & 1 \\ -1 & 2 \end {bmatrix} \times \begin {bmatrix} 0 & -1 \\ 1 & 0 \end {bmatrix} \times \begin {bmatrix} 2 & -1 \\ 1 & 1 \end {bmatrix} = \begin {bmatrix} \frac {1}{3} & -\frac {1}{3} \\ \frac {2}{3} & -1 \end {bmatrix} M′=T−1MT=31[1−112]×[01−10]×[21−11]=[3132−31−1]
11 特征向量与特征值
11.1 特征向量与特征值的定义
对于 nnn 阶矩阵 AAA,若存在非零向量 v⃗\vec {v}v 和标量 λ\lambdaλ,使得:
Av⃗=λv⃗A\vec {v} = \lambda\vec {v} Av=λv
则称 v⃗\vec {v}v 为 AAA 的特征向量,λ\lambdaλ 为对应的特征值。
11.1.2 几何意义
特征向量是线性变换中 “方向不变的向量”—— 经 AAA 变换后,v⃗\vec {v}v 仅发生缩放(缩放比例为 λ\lambdaλ),不改变方向(λ>0\lambda>0λ>0)或反向(λ<0\lambda<0λ<0)。
示例:矩阵 A=[3102]A = \begin {bmatrix} 3 & 1 \\ 0 & 2 \end {bmatrix}A=[3012] 对应的变换中,ı^=[10]\hat {\imath} = \begin {bmatrix} 1 \\ 0 \end {bmatrix}^=[10] 是特征向量(Aı^=3ı^A\hat {\imath} = 3\hat {\imath}A^=3^,λ=3\lambda=3λ=3),v⃗=[−11]\vec {v} = \begin {bmatrix} -1 \\ 1 \end {bmatrix}v=[−11] 也是特征向量(Av⃗=2v⃗A\vec {v} = 2\vec {v}Av=2v,λ=2\lambda=2λ=2)。
11.2 特征值与特征向量的求解
11.2.1 求解步骤
- 改写特征方程:Av⃗=λv⃗⟹(A−λI)v⃗=0⃗A\vec {v} = \lambda\vec {v} \implies (A - \lambda I)\vec {v} = \vec {0}Av=λv⟹(A−λI)v=0;
- 非零解条件:由于 v⃗≠0⃗\vec {v} \neq \vec {0}v=0,齐次方程组 (A−λI)v⃗=0⃗(A - \lambda I)\vec {v} = \vec {0}(A−λI)v=0 有非零解的充要条件是系数矩阵的行列式为 000,即:
det(A−λI)=0\det (A - \lambda I) = 0 det(A−λI)=0
该方程称为 AAA 的特征方程,展开后得到关于 λ\lambdaλ 的 nnn 次多项式(特征多项式); - 求解特征值:解特征方程得到 λ1,λ2,⋯,λn\lambda_1, \lambda_2, \cdots, \lambda_nλ1,λ2,⋯,λn(可能有重根或复根);
- 求解特征向量:对每个 λi\lambda_iλi,解方程组 (A−λiI)v⃗=0⃗(A - \lambda_i I)\vec {v} = \vec {0}(A−λiI)v=0,得到对应的特征向量 vi⃗\vec {v_i}vi。
11.2.2 特殊情况
- 旋转变换:二维旋转变换矩阵 A=[cosθ−sinθsinθcosθ]A = \begin {bmatrix} \cos\theta & -\sin\theta \\ \sin\theta & \cos\theta \end {bmatrix}A=[cosθsinθ−sinθcosθ] 的特征值为复数(λ=e±iθ\lambda = e^{\pm i\theta}λ=e±iθ),无实特征向量(旋转后所有向量方向改变);
- 剪切变换:剪切变换矩阵 A=[1101]A = \begin {bmatrix} 1 & 1 \\ 0 & 1 \end {bmatrix}A=[1011] 的特征值为 λ=1\lambda=1λ=1(二重根),仅存在一个线性无关的特征向量 [10]\begin {bmatrix} 1 \\ 0 \end {bmatrix}[10](无法对角化);
- 缩放变换:缩放变换矩阵 A=[k00k]A = \begin {bmatrix} k & 0 \\ 0 & k \end {bmatrix}A=[k00k] 的特征值为 λ=k\lambda=kλ=k(二重根),所有二维向量均为特征向量。
11.3 特征基与矩阵对角化
11.3.1 特征基的定义
若矩阵 AAA 有 nnn 个线性无关的特征向量 v1⃗,v2⃗,⋯,vn⃗\vec {v_1}, \vec {v_2}, \cdots, \vec {v_n}v1,v2,⋯,vn,则这组特征向量构成的基称为 AAA 的特征基。
11.3.2 矩阵对角化
设 PPP 是由特征向量构成的矩阵(P=[v1⃗v2⃗⋯vn⃗]P = \begin {bmatrix} \vec {v_1} & \vec {v_2} & \cdots & \vec {v_n} \end {bmatrix}P=[v1v2⋯vn]),Λ\LambdaΛ 是由对应特征值构成的对角矩阵(Λ=[λ10⋯00λ2⋯0⋮⋮⋱⋮00⋯λn]\Lambda = \begin {bmatrix} \lambda_1 & 0 & \cdots & 0 \\ 0 & \lambda_2 & \cdots & 0 \\ \vdots & \vdots & \ddots & \vdots \\ 0 & 0 & \cdots & \lambda_n \end {bmatrix}Λ=λ10⋮00λ2⋮0⋯⋯⋱⋯00⋮λn),则:
A=PΛP−1A = P\Lambda P^{-1} A=PΛP−1
该过程称为矩阵对角化。
- 优势:对角化后矩阵幂运算简化,Ak=PΛkP−1A^k = P\Lambda^k P^{-1}Ak=PΛkP−1,而 Λk=[λ1k0⋯00λ2k⋯0⋮⋮⋱⋮00⋯λnk]\Lambda^k = \begin {bmatrix} \lambda_1^k & 0 & \cdots & 0 \\ 0 & \lambda_2^k & \cdots & 0 \\ \vdots & \vdots & \ddots & \vdots \\ 0 & 0 & \cdots & \lambda_n^k \end {bmatrix}Λk=λ1k0⋮00λ2k⋮0⋯⋯⋱⋯00⋮λnk(仅需计算特征值的 kkk 次幂)。
11.3.3 对角化的条件
矩阵可对角化的充要条件是:矩阵有 nnn 个线性无关的特征向量(或特征值的几何重数等于代数重数)。
12 抽象向量空间
12.1 向量的抽象定义
线性代数的概念不仅适用于 “箭头” 或 “数字列表”,还可扩展到满足 “加法” 与 “数乘” 规则的任意事物(如函数、多项式、矩阵等)。这些事物构成的集合称为抽象向量空间,需满足以下八条公理(设 u⃗,v⃗,w⃗∈V\vec {u}, \vec {v}, \vec {w} \in Vu,v,w∈V,a,b∈Ra,b \in \mathbb {R}a,b∈R):
- 加法结合律:u⃗+(v⃗+w⃗)=(u⃗+v⃗)+w⃗\vec {u} + (\vec {v} + \vec {w}) = (\vec {u} + \vec {v}) + \vec {w}u+(v+w)=(u+v)+w;
- 加法交换律:u⃗+v⃗=v⃗+u⃗\vec {u} + \vec {v} = \vec {v} + \vec {u}u+v=v+u;
- 加法单位元:存在 0⃗∈V\vec {0} \in V0∈V,使得 v⃗+0⃗=v⃗\vec {v} + \vec {0} = \vec {v}v+0=v;
- 加法逆元:对任意 v⃗\vec {v}v,存在 −v⃗∈V-\vec {v} \in V−v∈V,使得 v⃗+(−v⃗)=0⃗\vec {v} + (-\vec {v}) = \vec {0}v+(−v)=0;
- 数乘相容性:a(bv⃗)=(ab)v⃗a (b\vec {v}) = (ab)\vec {v}a(bv)=(ab)v;
- 数乘单位元:1⋅v⃗=v⃗1 \cdot \vec {v} = \vec {v}1⋅v=v;
- 数乘对向量加法的分配律:a(u⃗+v⃗)=au⃗+av⃗a (\vec {u} + \vec {v}) = a\vec {u} + a\vec {v}a(u+v)=au+av;
- 数乘对标量加法的分配律:(a+b)v⃗=av⃗+bv⃗(a + b)\vec {v} = a\vec {v} + b\vec {v}(a+b)v=av+bv。
12.2 函数空间的示例
以 “所有多项式构成的集合” 为例,其满足抽象向量空间的定义:
- 向量加法:两个多项式 f(x)=anxn+⋯+a1x+a0f (x) = a_nx^n + \cdots + a_1x + a_0f(x)=anxn+⋯+a1x+a0 与 g(x)=bnxn+⋯+b1x+b0g (x) = b_nx^n + \cdots + b_1x + b_0g(x)=bnxn+⋯+b1x+b0 的和为 f(x)+g(x)=(an+bn)xn+⋯+(a1+b1)x+(a0+b0)f (x) + g (x) = (a_n + b_n) x^n + \cdots + (a_1 + b_1) x + (a_0 + b_0)f(x)+g(x)=(an+bn)xn+⋯+(a1+b1)x+(a0+b0);
- 向量数乘:标量 ccc 与多项式 f(x)f (x)f(x) 的数乘为 cf(x)=canxn+⋯+ca1x+ca0c f (x) = c a_nx^n + \cdots + c a_1x + c a_0cf(x)=canxn+⋯+ca1x+ca0;
- 基与维度:多项式空间的一组基为 {1,x,x2,⋯,xn}\{1, x, x^2, \cdots, x^n\}{1,x,x2,⋯,xn}(nnn 次多项式空间),维度为 n+1n+1n+1。
12.3 线性变换的扩展:线性算子
在抽象向量空间中,“线性变换” 称为线性算子,需满足与线性变换相同的条件(可加性与数乘性)。
12.3.1 导数算子的示例
导数是多项式空间上的线性算子(记为 DDD):
- 对任意多项式 f(x)f (x)f(x),D(f(x))=f′(x)D (f (x)) = f'(x)D(f(x))=f′(x);
- 线性验证:D(f(x)+g(x))=f′(x)+g′(x)=D(f(x))+D(g(x))D (f (x) + g (x)) = f'(x) + g'(x) = D (f (x)) + D (g (x))D(f(x)+g(x))=f′(x)+g′(x)=D(f(x))+D(g(x)),D(cf(x))=cf′(x)=cD(f(x))D (c f (x)) = c f'(x) = c D (f (x))D(cf(x))=cf′(x)=cD(f(x));
- 矩阵表示:以 {1,x,x2}\{1, x, x^2\}{1,x,x2} 为基,多项式 f(x)=a+bx+cx2f (x) = a + bx + cx^2f(x)=a+bx+cx2 的坐标为 [abc]\begin {bmatrix} a \\ b \\ c \end {bmatrix}abc,导数 D(f(x))=b+2cxD (f (x)) = b + 2cxD(f(x))=b+2cx 的坐标为 [b2c0]\begin {bmatrix} b \\ 2c \\ 0 \end {bmatrix}b2c0,对应的算子矩阵为:
D=[010002000]D = \begin {bmatrix} 0 & 1 & 0 \\ 0 & 0 & 2 \\ 0 & 0 & 0 \end {bmatrix} D=000100020
12.4 概念的统一
抽象向量空间中,线性代数的核心概念(如点积、特征向量)可对应扩展,不同领域的术语本质一致:
| 线性代数术语 | 抽象向量空间术语 | 示例(函数空间) |
|---|---|---|
| 线性变换 | 线性算子 | 导数 D(f(x))=f′(x)D (f (x)) = f'(x)D(f(x))=f′(x) |
| 点积 | 内积 | ⟨f,g⟩=∫abf(x)g(x)dx\langle f, g \rangle = \int_a^b f (x) g (x) dx⟨f,g⟩=∫abf(x)g(x)dx(积分内积) |
| 特征向量 | 特征函数 | 微分方程 D(f(x))=λf(x)D (f (x)) = \lambda f (x)D(f(x))=λf(x) 的解 f(x)=eλxf (x) = e^{\lambda x}f(x)=eλx |
13 总结
线性代数的本质是 “空间变换的数学描述”,其核心概念可通过几何直观与抽象统一理解:
1.向量:不仅是箭头或数字列表,更是满足加法与数乘规则的抽象对象;
2.矩阵:线性变换的数字表达,列向量对应基向量的变换结果;
3.行列式:空间体积的缩放比例,决定矩阵是否可逆;
4.特征向量 / 值:变换中方向不变的向量与对应的缩放比例,是理解变换本质的关键;
5.抽象向量空间:将线性代数的规律扩展到任意满足公理的集合,实现概念的普适性。
学习线性代数的关键在于 “建立直观” 而非 “记忆公式”,通过几何视角理解概念间的联系,才能在工程应用(如机器学习、机器人控制)中灵活运用,而非局限于计算层面。
via:
-
【直观详解】线性代数的本质 | Go Further | Stay Hungry, Stay Foolish
https://charlesliuyx.github.io/2017/10/06/【直观详解】线性代数的本质/ -
Determinant - Note201.pdf
https://math.ntnu.edu.tw/~li/Linear/Note201.pdf