Sequence Encoder-based Spatio temporal Knowledge Graph Completion
摘要
知识图谱(KG)补全旨在从不完整的知识图谱中推断出新的事实。大多数现有的解决方案侧重于从时间感知的事实三元组中学习,而忽略了空间信息。实际上,知识图谱可能随着时间变化以及位置的变化而演化,例如航班领域。因此,将时空信息融入到知识图谱表示中对知识图谱补全至关重要。为了解决这个问题,本文提出了两种基于序列编码器的时空感知知识图谱补全模型,即STSE和S-TSE,它们将空间和时间信息融入到关系中。该模型包括两个步骤:时空感知关系编码和最终评分函数评估。第一阶段将时空信息划分为不同的标记,然后通过两种方法获取时空感知关系的嵌入表示,采用递归神经网络(RNN)。第二阶段则提出了为两个模型设计的不同评分函数。对两个公共数据集进行了时空感知知识图谱补全任务的实证评估,实验结果证明了该提案在时空知识图谱补全中的有效性。
3.2 The Proposed Models for Spatiotemporal Knowledge Graph Completion
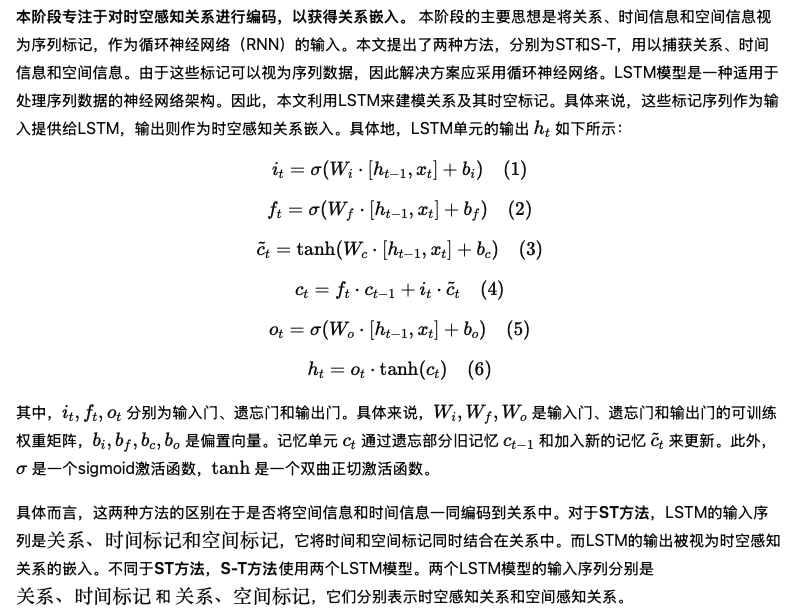
本部分详细介绍了提出的时空知识图谱补全模型。给定一个STKG(时空知识图谱),模型首先旨在学习实体和关系的表示。然后,利用评分函数评估事实的合理性,使得真实的事实能够获得较高的分数。因此,实体和关系的表示可以通过优化适当的成本函数进行学习。最后,根据每个实体和关系的学习嵌入,模型可以预测缺失的实体。
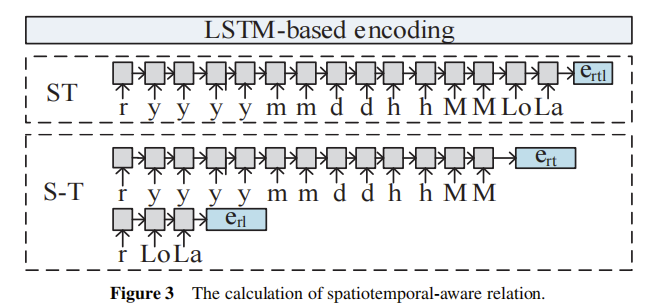
与以往忽略空间信息的研究不同,本文提出了两种模型,分别为STSE和S-TSE,它们将时空信息融入到事实中。首先,这两种模型利用LSTM模型捕捉顺序数据,即关系、时间标记和空间标记。接着,为了提高可用性,这两种模型应用现有的静态KGC评分函数来评估事实的合理性。具体而言,提出模型的概述如图1所示。从图1可以看出,STSE和S-TSE有两个主要组成部分,即关系编码和评分函数。对于关系编码阶段,STSE假设关系、时间信息和位置信息是不可分的。因此,它将空间和时间信息整合到关系中。具体来说,它通过LSTM模型依次处理关系、时间信息和位置。另一种模型,S-TSE,假设时间信息和位置信息是独立的。因此,S-TSE利用两个LSTM模型分别对空间感知关系和时间感知关系进行编码。对于评分函数,基于TransE模型【9】,我们为两个模型设计了不同的评分函数。
3.2.1 时空感知关系编码
提出的模型的主要组成部分之一是学习时空信息的关系表示。给定一个事实(h1,r1:<t1,l1>,h2),设计了两种方法来将空间和时间信息融合到关系中,以进行关系嵌入,分别为时空共同序列编码(ST)和时空独立序列编码(S-T)。这两种方法主要包括两个阶段:时空信息分解和时空感知关系编码。
对于第一阶段,这两种方法将空间和时间信息分解为时空标记的序列。对于第二阶段,这两种方法利用不同的方式对关系进行编码。具体而言,ST假设关系、时间信息和位置信息是不可分的。因此,它将空间和时间信息结合到关系中。具体来说,它通过LSTM模型处理关系、时间信息和位置信息。另一种模型,S-T,假设时间信息和位置是独立地影响关系。因此,S-T利用两个LSTM模型分别对时空感知关系和时空独立关系进行编码。每种方法的两个阶段的详细描述如下:
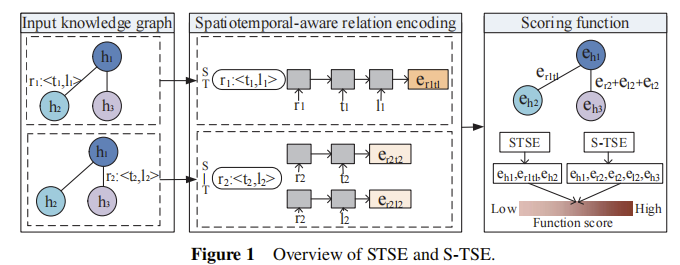
3.2.1.1 时空信息分解
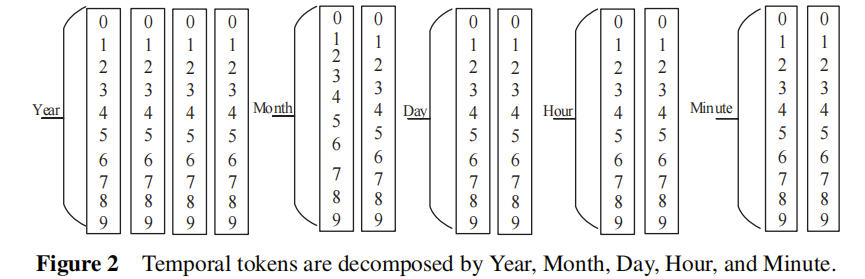
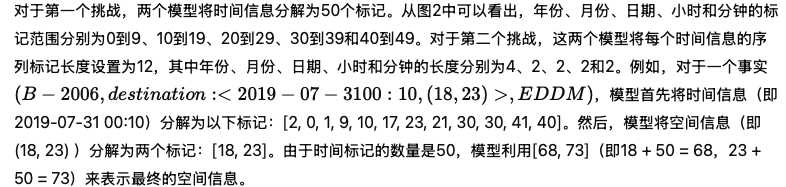
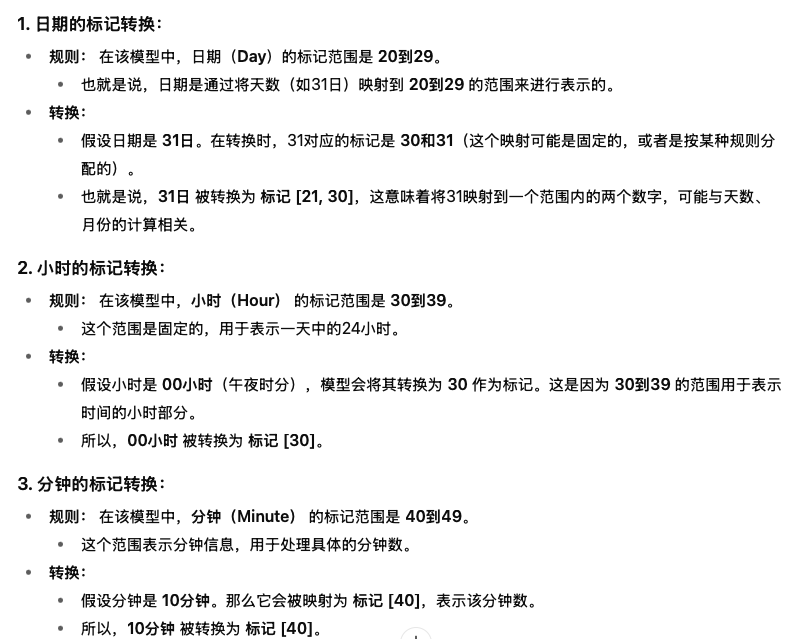
该阶段旨在将时空信息分解为时间标记的序列。对于这个阶段,第一个挑战是如何将时间和空间信息分解成标记。第二个挑战是如何选择总标记的数量。研究[23]提出了一种新方法,将时间信息分解为32个标记,然而,存在两个问题。第一个是它仅处理年、月和日,忽略了更细粒度的时间信息,例如分钟和秒。为了改进,本文采用1到12的标记表示月份,且与月份标记一致,其他日期标记仍为0到9。因此,本文提出了一种新的方法,将时间信息分解为五个部分,包括年、月、日、小时和分钟。每个部分可以用十个不同的标记表示(即0到9),如图2所示。
3.2.1.2 Spatiotemporal-aware relation encoding
3.2.2 Scoring function