【完整源码+数据集+部署教程】 肺结节图像分割系统源码&数据集分享 [yolov8-seg-LAWDS等50+全套改进创新点发刊_一键训练教程_Web前端展示
背景意义
研究背景与意义
肺结节的早期检测与诊断对于降低肺癌的死亡率至关重要。根据世界卫生组织的统计数据,肺癌已成为全球范围内导致癌症相关死亡的主要原因之一。肺结节的出现往往是肺癌的早期信号,因此,准确、快速地识别和分割肺结节图像对于临床决策和患者预后具有重要意义。传统的肺结节检测方法依赖于放射科医生的经验和判断,然而,随着医学影像数据量的急剧增加,人工分析的效率和准确性面临着严峻挑战。因此,基于深度学习的自动化图像分割技术逐渐成为研究的热点。
在众多深度学习模型中,YOLO(You Only Look Once)系列因其高效的实时目标检测能力而受到广泛关注。YOLOv8作为该系列的最新版本,具备了更强的特征提取能力和更快的处理速度,适合用于医学图像分析。尽管YOLOv8在目标检测领域表现出色,但在肺结节图像分割任务中仍存在一定的局限性,尤其是在处理小尺寸结节和复杂背景时。因此,改进YOLOv8以增强其在肺结节图像分割中的表现,具有重要的学术价值和实际意义。
本研究将基于改进的YOLOv8模型,构建一个高效的肺结节图像分割系统。所使用的数据集包含1600幅图像,涵盖了三类重要的病理类型:腺癌、癌症和结节。这些数据不仅为模型的训练提供了丰富的样本,也为后续的模型评估和验证奠定了基础。通过对不同类别的肺结节进行精确分割,研究旨在提高模型在实际应用中的鲁棒性和准确性,进而为临床医生提供更为可靠的辅助诊断工具。
此外,肺结节的图像分割研究不仅具有临床应用价值,也为深度学习在医学影像分析中的应用提供了新的思路。通过改进YOLOv8模型,研究将探索深度学习技术在复杂医学图像处理中的潜力,推动相关领域的研究进展。该研究的成果有望为肺结节的早期检测和诊断提供新的技术支持,促进个性化医疗的发展,最终提高患者的生存率和生活质量。
综上所述,基于改进YOLOv8的肺结节图像分割系统的研究,不仅响应了医学影像分析领域对高效、准确的自动化工具的迫切需求,也为深度学习技术在医学领域的应用探索提供了新的方向。通过本研究,期望能够为肺结节的早期识别和治疗提供有力支持,推动肺癌防治工作的进展。
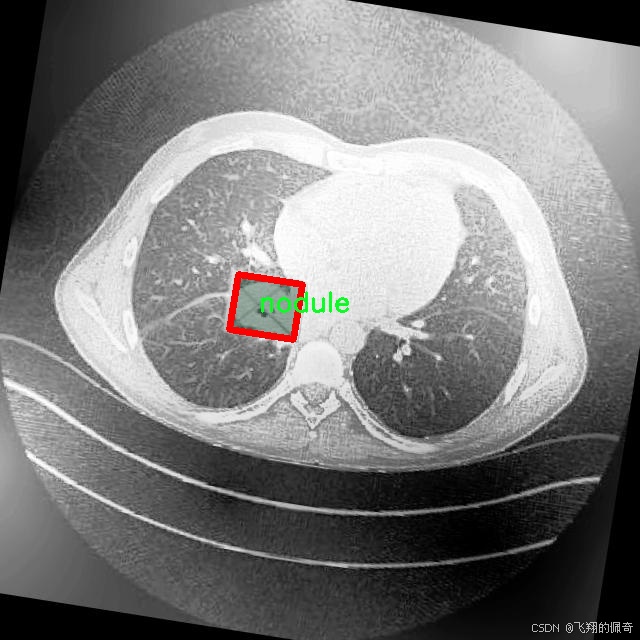
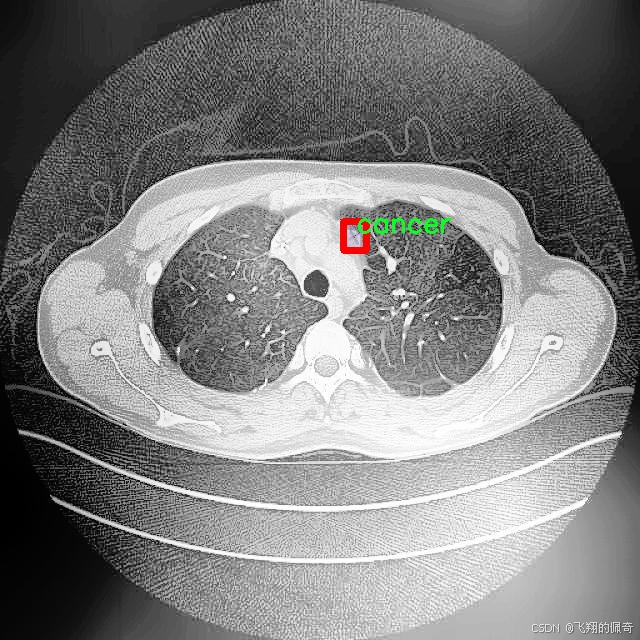
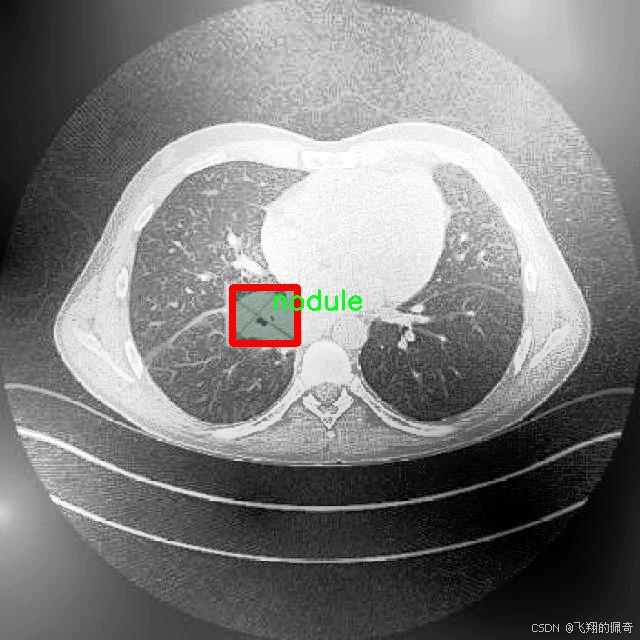
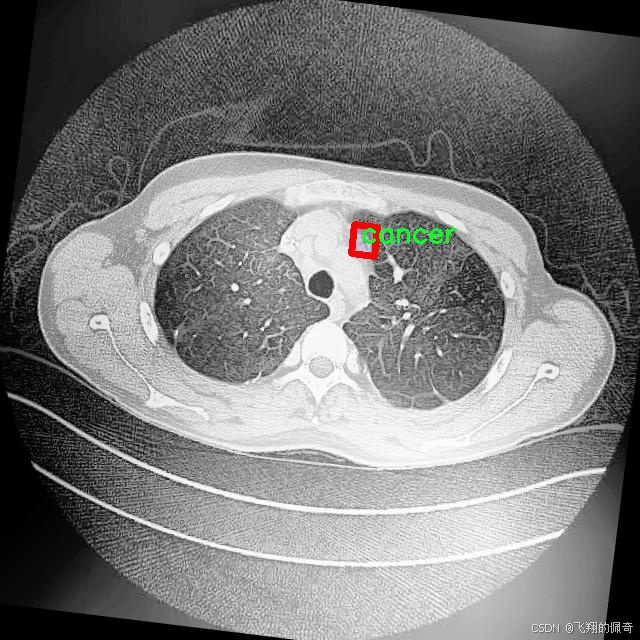
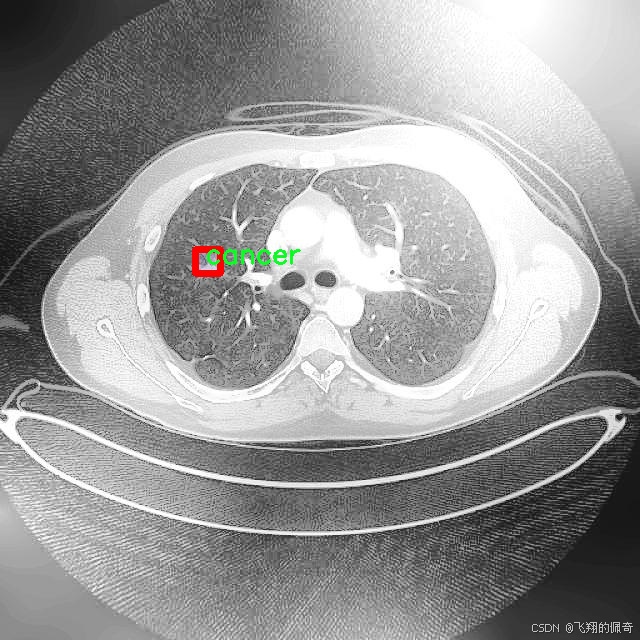
图片效果

数据集信息
数据集信息展示
在肺结节图像分割的研究中,数据集的选择与构建至关重要。本研究所采用的数据集名为“Lung Nodule Segmentation study”,其设计旨在为改进YOLOv8-seg模型提供高质量的训练数据。该数据集专注于肺部影像中的结节分割,特别是针对不同类型的肺结节进行精确标注,以便于后续的深度学习模型训练和性能评估。
“Lung Nodule Segmentation study”数据集中包含三种主要类别,分别为腺癌(adenocarcinoma)、癌症(cancer)和结节(nodule)。这些类别的选择不仅反映了肺部影像学中的常见病理类型,也为模型的多样性和适应性提供了基础。腺癌作为一种常见的肺癌类型,其在影像学上的表现与其他类型的肺结节有显著差异,因此在数据集中占据了重要地位。癌症这一类别则涵盖了更广泛的病理变化,旨在提高模型对不同癌症类型的识别能力。结节类别则是数据集的核心,主要用于训练模型在图像中准确识别和分割出肺结节的区域。
数据集的构建过程中,研究团队采用了高标准的影像采集和标注流程,确保每一幅图像的质量和标注的准确性。影像数据主要来源于临床病例,经过严格筛选和预处理,以去除噪声和伪影,确保模型训练的有效性。每一幅图像都经过专业放射科医师的标注,确保了类别标签的准确性和一致性。这种高质量的标注不仅提高了模型的训练效果,也为后续的模型评估提供了可靠的基准。
在数据集的使用过程中,研究者们还特别关注了类别不平衡的问题。由于不同类型的肺结节在临床中的发生率不同,腺癌和癌症的样本数量可能会显著少于结节类别。为了解决这一问题,研究团队采用了数据增强技术,通过旋转、缩放、翻转等方式扩充数据集,增加了少数类别的样本数量,从而提高了模型对各类别的识别能力。
此外,数据集还提供了丰富的元数据,包括影像的获取时间、患者的基本信息、影像的分辨率等。这些信息不仅有助于研究者深入分析模型的表现,还为未来的研究提供了重要的参考依据。通过对不同类别的肺结节进行系统的分析,研究者们希望能够揭示其在影像学特征上的差异,从而为临床诊断提供更为精准的支持。
总之,“Lung Nodule Segmentation study”数据集的构建与应用为改进YOLOv8-seg的肺结节图像分割系统提供了坚实的基础。通过对数据集的精心设计与实施,研究团队不仅希望提升模型的分割精度,更希望能够为肺结节的早期诊断和治疗提供有力的技术支持。随着研究的深入,该数据集将为未来的肺部影像学研究和深度学习应用提供持续的动力和支持。
核心代码
```python
import os
import time
import cv2
import pandas as pd
from PIL import Imagedef save_chinese_image(file_path, image_array):"""保存带有中文路径的图片文件参数:file_path (str): 图片的保存路径,应包含中文字符image_array (numpy.ndarray): 要保存的 OpenCV 图像(即 numpy 数组)"""try:# 将 OpenCV 图片转换为 Pillow Image 对象image = Image.fromarray(cv2.cvtColor(image_array, cv2.COLOR_BGR2RGB))# 使用 Pillow 保存图片文件image.save(file_path)print(f"成功保存图像到: {file_path}")except Exception as e:print(f"保存图像失败: {str(e)}")class ResultLogger:def __init__(self):"""初始化ResultLogger类,创建一个空的DataFrame用于存储识别结果。"""self.results_df = pd.DataFrame(columns=["识别结果", "位置", "面积", "时间"])def concat_results(self, result, location, confidence, time):"""将检测结果添加到结果DataFrame中。参数:result (str): 检测结果。location (str): 检测位置。confidence (str): 置信度。time (str): 检出目标所在时间。返回:pd.DataFrame: 更新后的DataFrame。"""# 创建一个包含这些信息的字典result_data = {"识别结果": [result],"位置": [location],"面积": [confidence],"时间": [time]}# 创建一个新的DataFrame并将其添加到实例的DataFramenew_row = pd.DataFrame(result_data)self.results_df = pd.concat([self.results_df, new_row], ignore_index=True)return self.results_dfclass LogTable:def __init__(self, csv_file_path=None):"""初始化LogTable类实例,尝试从CSV文件加载数据。参数:csv_file_path (str): 保存初始数据的CSV文件路径。"""self.csv_file_path = csv_file_pathcolumns = ['文件路径', '识别结果', '位置', '面积', '时间']# 尝试从CSV文件加载数据,如果失败则创建一个空的DataFrameif csv_file_path and os.path.exists(csv_file_path):self.data = pd.read_csv(csv_file_path, encoding='utf-8')else:self.data = pd.DataFrame(columns=columns)def add_log_entry(self, file_path, recognition_result, position, confidence, time_spent):"""向日志中添加一条新记录。参数:file_path (str): 文件路径recognition_result (str): 识别结果position (str): 位置confidence (float): 置信度time_spent (float): 用时(通常是秒或毫秒)返回:None"""# 创建新的数据行new_entry = pd.DataFrame([[file_path, recognition_result, position, confidence, time_spent]],columns=['文件路径', '识别结果', '位置', '面积', '时间'])# 将新行添加到DataFrame中self.data = pd.concat([new_entry, self.data]).reset_index(drop=True)def save_to_csv(self):"""将更新后的DataFrame保存到CSV文件。"""self.data.to_csv(self.csv_file_path, index=False, encoding='utf-8', mode='a', header=False)代码分析
-
save_chinese_image: 该函数用于保存带有中文路径的图片。它使用Pillow库将OpenCV图像转换为Pillow图像,然后保存到指定路径。
-
ResultLogger类: 该类用于记录检测结果。它包含一个DataFrame来存储识别结果、位置、面积和时间。
concat_results方法用于将新的检测结果添加到DataFrame中。 -
LogTable类: 该类用于管理日志数据,包括从CSV文件加载数据、添加新记录、保存数据到CSV文件等。
add_log_entry方法用于添加新的日志记录,save_to_csv方法用于将更新后的数据保存到CSV文件。
总结
以上代码实现了图像保存和结果记录的基本功能,使用了Pandas进行数据管理,并且考虑了中文路径的处理。```
这个 log.py 文件主要用于处理图像和日志记录,特别是在涉及中文路径和图像保存时。文件中包含几个重要的类和函数,下面是对其功能的详细说明。
首先,文件导入了一些必要的库,包括 os、time、cv2(OpenCV)、pandas、PIL(Python Imaging Library)、numpy 和 datetime。这些库提供了文件操作、时间处理、图像处理和数据框操作等功能。
文件中定义了一个函数 save_chinese_image,该函数用于保存带有中文路径的图像。它接受两个参数:文件路径和图像数组。函数内部首先将 OpenCV 格式的图像转换为 Pillow 的图像对象,然后使用 Pillow 的 save 方法保存图像。如果保存成功,会打印成功信息;如果失败,则捕获异常并打印错误信息。
接下来是 ResultLogger 类,它用于记录检测结果。初始化时,它创建一个空的 DataFrame,包含四个列:识别结果、位置、面积和时间。concat_results 方法用于将新的检测结果添加到 DataFrame 中,接收检测结果、位置、置信度和时间作为参数,并将这些信息存储为新的行。
然后是 LogTable 类,负责管理图像和日志记录。它的初始化方法接受一个可选的 CSV 文件路径,用于加载或创建一个空的 DataFrame。类中定义了多个方法,包括 add_frames 用于添加图像和检测信息,clear_frames 用于清空保存的图像和结果,save_frames_file 用于保存图像或视频,add_log_entry 用于向日志中添加新记录,clear_data 用于清空数据,save_to_csv 用于将 DataFrame 保存到 CSV 文件,以及 update_table 用于更新显示的日志表格。
在 save_frames_file 方法中,如果保存的图像列表不为空,它会根据图像数量决定是保存为单张图片还是视频。如果只有一张图像,它会保存为 PNG 格式;如果有多张图像,则会保存为 AVI 格式的视频。该方法还会生成文件名,并使用 OpenCV 的 VideoWriter 类进行视频写入。
add_log_entry 方法用于将新的日志记录添加到 DataFrame 中,创建一个新的数据行并将其与现有数据合并。save_to_csv 方法则将更新后的 DataFrame 保存到指定的 CSV 文件中。
最后,update_table 方法用于更新日志表格,显示最新的 500 条记录,确保在用户界面上展示的信息是最新的。
总体而言,这个文件提供了一套完整的图像处理和日志记录功能,适用于需要处理中文路径和保存图像的应用场景。
```python
import cv2
import numpy as np
from PIL import ImageFont, ImageDraw, Image
from hashlib import md5def calculate_polygon_area(points):"""计算多边形的面积。参数:points (numpy.ndarray): 多边形的顶点坐标,形状为(N, 2)。返回:float: 多边形的面积。"""if len(points) < 3: # 多边形至少需要3个顶点return 0return cv2.contourArea(points)def draw_with_chinese(image, text, position, font_size=20, color=(255, 0, 0)):"""在OpenCV图像上绘制中文文字。参数:image (numpy.ndarray): 输入的图像。text (str): 要绘制的文本。position (tuple): 文本的起始位置。font_size (int): 字体大小。color (tuple): 文本颜色,BGR格式。返回:numpy.ndarray: 绘制了文本的图像。"""# 将图像从 OpenCV 格式(BGR)转换为 PIL 格式(RGB)image_pil = Image.fromarray(cv2.cvtColor(image, cv2.COLOR_BGR2RGB))draw = ImageDraw.Draw(image_pil)# 使用指定的字体font = ImageFont.truetype("simsun.ttc", font_size, encoding="unic")draw.text(position, text, font=font, fill=color)# 将图像从 PIL 格式(RGB)转换回 OpenCV 格式(BGR)return cv2.cvtColor(np.array(image_pil), cv2.COLOR_RGB2BGR)def generate_color_based_on_name(name):"""根据名称生成稳定的颜色。参数:name (str): 输入的名称。返回:tuple: 生成的颜色,BGR格式。"""hash_object = md5(name.encode())hex_color = hash_object.hexdigest()[:6] # 取前6位16进制数r, g, b = int(hex_color[0:2], 16), int(hex_color[2:4], 16), int(hex_color[4:6], 16)return (b, g, r) # OpenCV 使用BGR格式def draw_detections(image, info, alpha=0.2):"""在图像上绘制检测结果。参数:image (numpy.ndarray): 输入的图像。info (dict): 检测信息,包括类别名称、边界框、置信度等。alpha (float): 透明度。返回:numpy.ndarray: 绘制了检测结果的图像。float: 目标面积。"""name, bbox, conf, cls_id, mask = info['class_name'], info['bbox'], info['score'], info['class_id'], info['mask']x1, y1, x2, y2 = bbox# 绘制边界框cv2.rectangle(image, (x1, y1), (x2, y2), color=(0, 0, 255), thickness=3)# 绘制类别名称image = draw_with_chinese(image, name, (x1, y1 - 10), font_size=20)if mask is not None:mask_points = np.concatenate(mask)mask_color = generate_color_based_on_name(name)cv2.fillPoly(image, [mask_points.astype(np.int32)], mask_color) # 填充掩码区域area = calculate_polygon_area(mask_points) # 计算面积else:area = (x2 - x1) * (y2 - y1) # 计算边界框面积return image, area# 示例:使用这些函数进行图像处理
if __name__ == "__main__":# 假设有一张图像和检测信息image = cv2.imread("example.jpg") # 读取图像detection_info = {'class_name': '目标','bbox': [50, 50, 200, 200],'score': 0.95,'class_id': 1,'mask': None # 假设没有掩码}# 绘制检测结果processed_image, area = draw_detections(image, detection_info)cv2.imshow("Detection Result", processed_image) # 显示结果cv2.waitKey(0)cv2.destroyAllWindows()
代码说明:
- calculate_polygon_area: 计算多边形的面积,输入为多边形的顶点坐标。
- draw_with_chinese: 在图像上绘制中文文本,使用PIL库处理中文字体。
- generate_color_based_on_name: 根据名称生成稳定的颜色,使用MD5哈希函数确保颜色的一致性。
- draw_detections: 在图像上绘制检测结果,包括边界框和类别名称,并计算目标的面积。
- 主程序: 读取一张图像,使用检测信息调用绘制函数,并显示结果。```
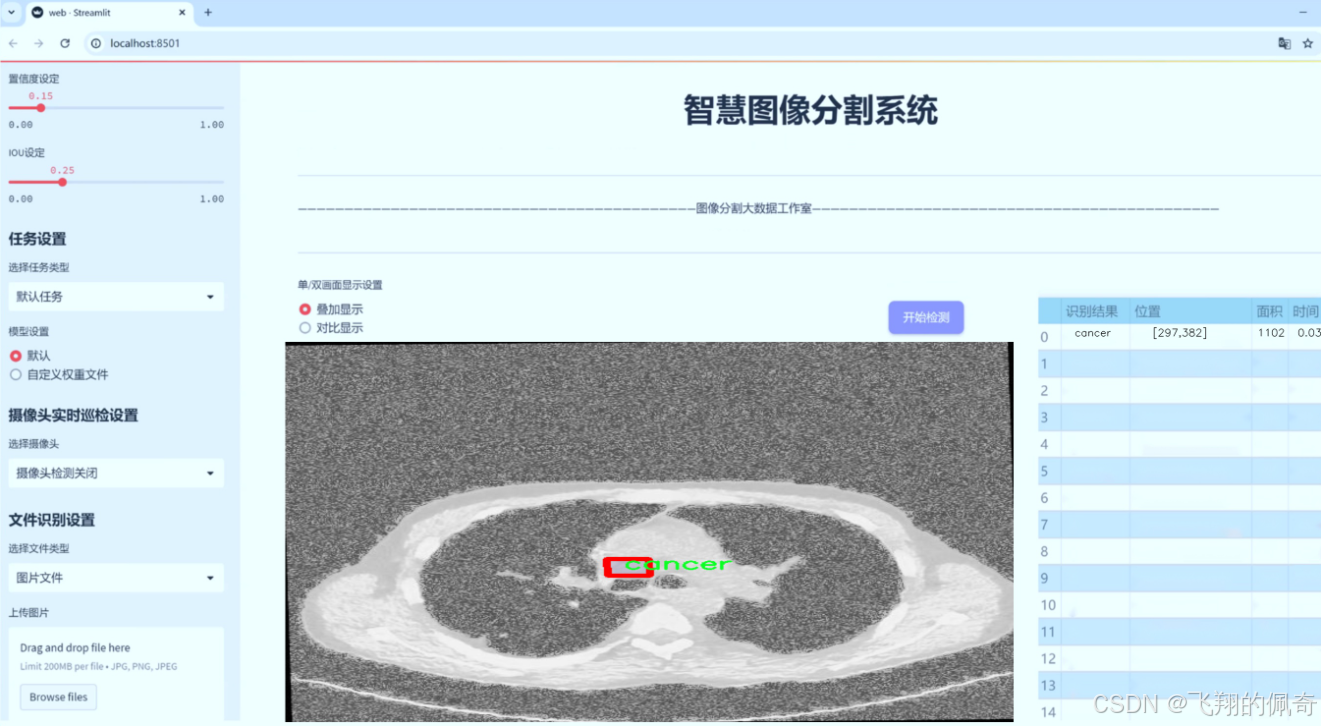
这个程序文件web.py是一个基于Streamlit框架的图像分割和目标检测系统。它结合了计算机视觉技术,允许用户通过摄像头或上传的图像/视频文件进行目标检测,并实时显示检测结果。以下是对程序的详细说明。
程序首先导入了所需的库,包括random、tempfile、time、os、cv2(OpenCV)、numpy、streamlit等。这些库提供了图像处理、用户界面构建和其他功能。
接下来,定义了一些辅助函数,例如计算多边形面积、在图像上绘制中文文本、生成基于名称的颜色、调整参数等。这些函数用于处理图像、绘制检测框和标签、计算面积等。
Detection_UI类是程序的核心,负责初始化和管理整个检测系统。它的构造函数中,初始化了一些参数,包括类别标签、颜色、模型类型、置信度阈值、IOU阈值等。同时,它还设置了页面布局和样式,获取可用的摄像头列表,并加载目标检测模型。
setup_page和setup_sidebar方法用于设置页面的标题和侧边栏的布局,允许用户选择模型类型、摄像头、文件类型等。
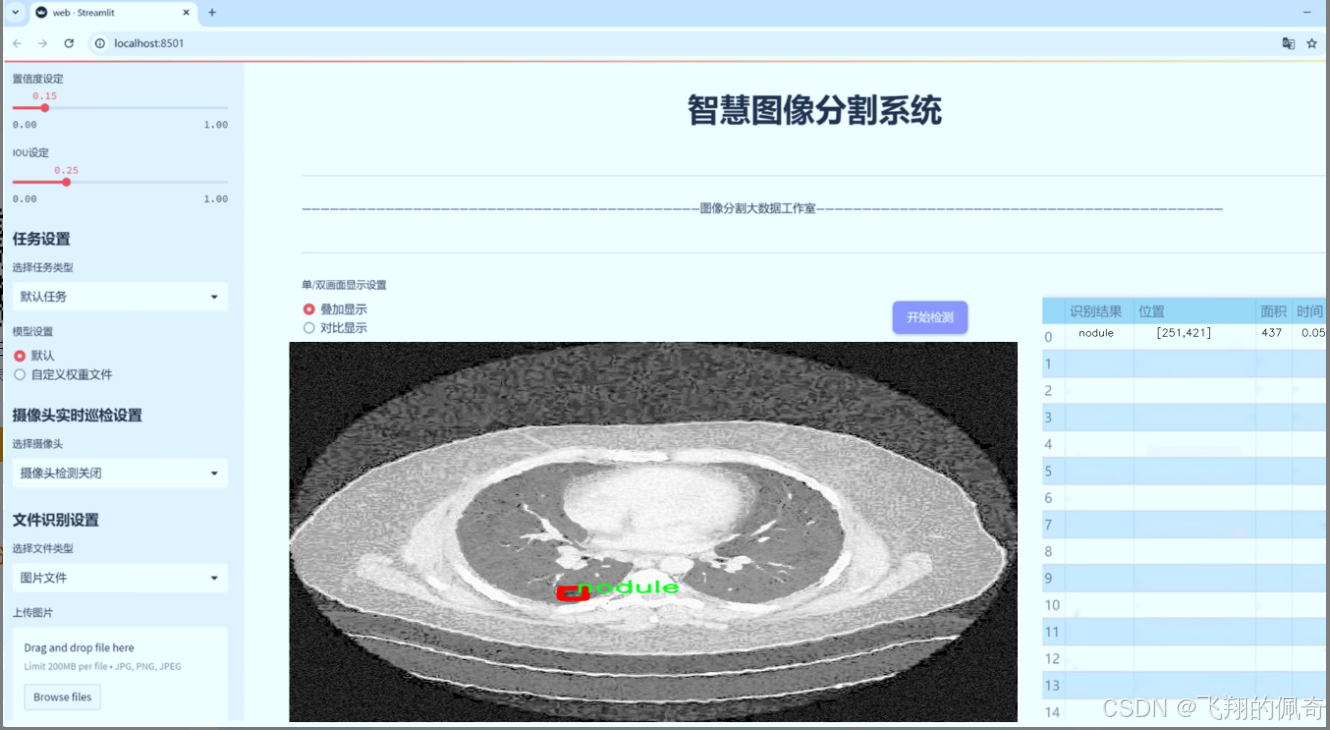
process_camera_or_file方法是处理用户输入的核心逻辑。如果用户选择了摄像头,它会打开摄像头并实时捕获图像进行处理;如果用户上传了图像或视频文件,则会读取文件并进行检测。检测结果会实时更新并显示在页面上。
frame_process方法用于处理单个图像帧,调用模型进行预测,并绘制检测框和标签。检测信息会被记录并更新到表格中。
在检测过程中,程序会根据用户的选择显示不同的结果,包括原始图像和识别结果的叠加显示或对比显示。同时,程序提供了导出结果的功能,允许用户将检测结果保存为CSV文件。
最后,程序通过实例化Detection_UI类并调用setupMainWindow方法来启动应用。这一过程会构建整个用户界面并开始处理输入。
总体而言,这个程序实现了一个功能丰富的图像分割和目标检测系统,结合了实时视频处理和用户交互界面,适用于各种计算机视觉应用场景。
```python
import json
from time import time
from ultralytics.hub.utils import HUB_WEB_ROOT, PREFIX, events
from ultralytics.utils import LOGGER, SETTINGSdef on_fit_epoch_end(trainer):"""在每个训练周期结束时上传训练进度指标。"""session = getattr(trainer, 'hub_session', None) # 获取训练器的会话信息if session:# 在验证结束后上传指标all_plots = {**trainer.label_loss_items(trainer.tloss, prefix='train'), **trainer.metrics} # 收集训练损失和指标if trainer.epoch == 0:from ultralytics.utils.torch_utils import model_info_for_loggersall_plots = {**all_plots, **model_info_for_loggers(trainer)} # 在第一个周期时添加模型信息session.metrics_queue[trainer.epoch] = json.dumps(all_plots) # 将指标序列化并存入队列if time() - session.timers['metrics'] > session.rate_limits['metrics']: # 检查是否超过上传时间限制session.upload_metrics() # 上传指标session.timers['metrics'] = time() # 重置计时器session.metrics_queue = {} # 重置队列def on_model_save(trainer):"""在上传模型检查点时应用速率限制。"""session = getattr(trainer, 'hub_session', None) # 获取训练器的会话信息if session:is_best = trainer.best_fitness == trainer.fitness # 判断当前模型是否是最佳模型if time() - session.timers['ckpt'] > session.rate_limits['ckpt']: # 检查是否超过上传时间限制LOGGER.info(f'{PREFIX}Uploading checkpoint {HUB_WEB_ROOT}/models/{session.model_id}') # 记录上传信息session.upload_model(trainer.epoch, trainer.last, is_best) # 上传模型检查点session.timers['ckpt'] = time() # 重置计时器def on_train_end(trainer):"""在训练结束时上传最终模型和指标。"""session = getattr(trainer, 'hub_session', None) # 获取训练器的会话信息if session:LOGGER.info(f'{PREFIX}Syncing final model...') # 记录同步信息session.upload_model(trainer.epoch, trainer.best, map=trainer.metrics.get('metrics/mAP50-95(B)', 0), final=True) # 上传最终模型session.alive = False # 停止心跳LOGGER.info(f'{PREFIX}Done ✅\n'f'{PREFIX}View model at {HUB_WEB_ROOT}/models/{session.model_id} 🚀') # 记录完成信息# 回调函数字典,存储训练、验证、预测和导出过程中的事件处理函数
callbacks = {'on_fit_epoch_end': on_fit_epoch_end,'on_model_save': on_model_save,'on_train_end': on_train_end,
} if SETTINGS['hub'] is True else {} # 检查是否启用
代码核心部分说明:
-
on_fit_epoch_end: 该函数在每个训练周期结束时被调用,用于上传训练进度指标。它会收集当前的训练损失和指标,并在达到上传时间限制后将其上传到服务器。
-
on_model_save: 该函数负责在训练过程中保存模型检查点,并应用速率限制。它会判断当前模型是否是最佳模型,并在达到上传时间限制后进行上传。
-
on_train_end: 该函数在训练结束时被调用,负责上传最终的模型和相关指标,并记录同步信息。
-
callbacks: 这是一个字典,存储了与训练、验证、预测和导出相关的回调函数,仅在设置中启用hub时才会创建。```
这个程序文件是Ultralytics YOLO框架中的一个回调函数模块,主要用于在训练、验证和预测过程中与Ultralytics HUB进行交互。文件中定义了一系列回调函数,这些函数在特定事件发生时被调用,以记录训练进度、上传模型和指标等。
首先,文件导入了一些必要的库和模块,包括json和time,以及Ultralytics HUB相关的工具和日志记录器。接下来,定义了一些回调函数。
on_pretrain_routine_end函数在预训练过程结束时被调用。它检查训练器是否有与HUB的会话,如果有,则记录模型的链接,并开始计时,以便后续上传时遵循速率限制。
on_fit_epoch_end函数在每个训练周期结束时被调用。它同样检查HUB会话,并在验证结束后上传训练进度的指标。如果是第一个周期,还会记录模型的信息。该函数还会检查上传速率限制,并在合适的时间上传指标。
on_model_save函数用于保存模型检查点。它会检查HUB会话,并在满足速率限制的情况下上传当前的模型检查点。该函数还会判断当前模型是否是最佳模型,并记录相关信息。
on_train_end函数在训练结束时被调用。它会上传最终的模型和指标,并停止与HUB的心跳连接,表示训练的完成。
on_train_start、on_val_start、on_predict_start和on_export_start函数分别在训练、验证、预测和导出开始时被调用,执行与这些事件相关的操作。
最后,所有的回调函数被组织成一个字典,只有在设置中启用了HUB功能时,这些回调函数才会被使用。这个模块的设计使得在训练过程中可以方便地与Ultralytics HUB进行交互,上传模型和训练指标,从而便于模型的管理和监控。
```python
import os
import random
import numpy as np
import torch
from torch.utils.data import DataLoader
from .dataset import YOLODataset
from .utils import PIN_MEMORYclass InfiniteDataLoader(DataLoader):"""自定义的无限数据加载器,继承自 PyTorch 的 DataLoader。该加载器会无限循环使用工作线程。"""def __init__(self, *args, **kwargs):"""初始化无限数据加载器,重写 batch_sampler 为重复采样器。"""super().__init__(*args, **kwargs)object.__setattr__(self, 'batch_sampler', _RepeatSampler(self.batch_sampler))self.iterator = super().__iter__()def __len__(self):"""返回 batch_sampler 的长度。"""return len(self.batch_sampler.sampler)def __iter__(self):"""创建一个无限循环的迭代器。"""for _ in range(len(self)):yield next(self.iterator)def reset(self):"""重置迭代器,适用于训练过程中修改数据集设置。"""self.iterator = self._get_iterator()class _RepeatSampler:"""无限重复的采样器。参数:sampler (Dataset.sampler): 要重复的采样器。"""def __init__(self, sampler):"""初始化一个对象,该对象会无限重复给定的采样器。"""self.sampler = samplerdef __iter__(self):"""无限迭代采样器并返回其内容。"""while True:yield from iter(self.sampler)def seed_worker(worker_id):"""设置数据加载器工作线程的随机种子,以确保可重复性。"""worker_seed = torch.initial_seed() % 2 ** 32np.random.seed(worker_seed)random.seed(worker_seed)def build_yolo_dataset(cfg, img_path, batch, data, mode='train', rect=False, stride=32):"""构建 YOLO 数据集。"""return YOLODataset(img_path=img_path,imgsz=cfg.imgsz,batch_size=batch,augment=mode == 'train', # 训练模式下进行数据增强hyp=cfg, # 超参数配置rect=cfg.rect or rect, # 是否使用矩形批次cache=cfg.cache or None,single_cls=cfg.single_cls or False,stride=int(stride),pad=0.0 if mode == 'train' else 0.5, # 训练时不填充,验证时填充classes=cfg.classes,data=data,fraction=cfg.fraction if mode == 'train' else 1.0 # 训练时使用的样本比例)def build_dataloader(dataset, batch, workers, shuffle=True, rank=-1):"""返回用于训练或验证集的 InfiniteDataLoader 或 DataLoader。"""batch = min(batch, len(dataset)) # 确保批次不超过数据集大小nd = torch.cuda.device_count() # 获取 CUDA 设备数量nw = min([os.cpu_count() // max(nd, 1), batch if batch > 1 else 0, workers]) # 计算工作线程数量sampler = None if rank == -1 else distributed.DistributedSampler(dataset, shuffle=shuffle) # 分布式采样器generator = torch.Generator()generator.manual_seed(6148914691236517205 + RANK) # 设置随机种子return InfiniteDataLoader(dataset=dataset,batch_size=batch,shuffle=shuffle and sampler is None,num_workers=nw,sampler=sampler,pin_memory=PIN_MEMORY,worker_init_fn=seed_worker,generator=generator) # 返回自定义的无限数据加载器
代码注释说明
-
InfiniteDataLoader: 这是一个自定义的数据加载器,能够无限循环地使用工作线程。它重写了
__iter__方法,以便在每次迭代时从数据集中获取下一个批次。 -
_RepeatSampler: 这是一个内部类,用于实现无限重复的采样器。它会不断迭代给定的采样器,确保可以无限获取数据。
-
seed_worker: 这个函数用于设置每个工作线程的随机种子,以确保在多线程环境下的可重复性。
-
build_yolo_dataset: 该函数用于构建 YOLO 数据集,接受配置参数、图像路径、批次大小等,并返回一个
YOLODataset实例。 -
build_dataloader: 这个函数用于创建数据加载器,返回一个
InfiniteDataLoader实例,支持多线程和分布式训练。```
这个程序文件主要是用于构建和管理YOLO(You Only Look Once)模型的数据加载器,旨在支持图像和视频数据的处理。程序中包含多个类和函数,具体功能如下:
首先,程序导入了一些必要的库,包括操作系统、随机数生成、路径处理、NumPy、PyTorch、PIL(Python Imaging Library)等。这些库为数据处理和模型训练提供了基础支持。
接下来,定义了一个名为InfiniteDataLoader的类,它继承自PyTorch的DataLoader。这个类的主要功能是创建一个可以无限循环的迭代器,以便在训练过程中重复使用数据。它重写了__len__和__iter__方法,使得数据加载器可以在训练时不断地提供数据。
_RepeatSampler是一个辅助类,用于实现无限重复的采样器。它的__iter__方法会不断迭代给定的采样器,从而实现无限循环。
seed_worker函数用于设置数据加载器工作线程的随机种子,以确保在多线程环境下的随机性一致性。这对于训练过程中的数据增强和随机抽样非常重要。
build_yolo_dataset函数用于构建YOLO数据集。它接受配置参数、图像路径、批量大小等,返回一个YOLODataset对象。这个函数还支持数据增强、缓存、类别选择等功能,适应不同的训练模式(如训练或验证)。
build_dataloader函数则用于返回一个InfiniteDataLoader或标准的DataLoader,根据传入的数据集、批量大小、工作线程数等参数进行配置。它还支持分布式训练,能够根据CUDA设备的数量和CPU核心数来合理分配工作线程。
check_source函数用于检查输入源的类型,支持多种格式(如字符串、整数、路径、图像、张量等),并返回相应的标志值。这对于后续的数据加载和处理至关重要。
最后,load_inference_source函数用于加载推理源,支持多种输入格式,并应用必要的转换。根据输入源的类型,它会选择不同的加载方式(如从张量、流、截图、图像等),并返回一个数据集对象。
整体来看,这个程序文件为YOLO模型的训练和推理提供了灵活的数据加载和处理机制,能够高效地管理不同类型的数据源,并支持多种训练和推理模式。
```python
import torch
import torch.nn as nn
import torch.nn.functional as Fclass Conv2d_BN(torch.nn.Sequential):"""一个包含2D卷积和批量归一化的顺序容器。"""def __init__(self, in_channels, out_channels, kernel_size=1, stride=1, padding=0):"""初始化卷积层和批量归一化层。"""super().__init__()# 添加卷积层self.add_module('conv', nn.Conv2d(in_channels, out_channels, kernel_size, stride, padding, bias=False))# 添加批量归一化层self.add_module('bn', nn.BatchNorm2d(out_channels))class PatchEmbed(nn.Module):"""将图像嵌入为补丁并投影到指定的嵌入维度。"""def __init__(self, in_chans, embed_dim, resolution, activation):"""初始化补丁嵌入层。"""super().__init__()img_size = (resolution, resolution) # 假设输入为正方形图像self.patches_resolution = (img_size[0] // 4, img_size[1] // 4) # 每个补丁的分辨率self.seq = nn.Sequential(Conv2d_BN(in_chans, embed_dim // 2, kernel_size=3, stride=2, padding=1),activation(),Conv2d_BN(embed_dim // 2, embed_dim, kernel_size=3, stride=2, padding=1),)def forward(self, x):"""通过补丁嵌入层的序列操作运行输入张量。"""return self.seq(x)class TinyViT(nn.Module):"""TinyViT架构,用于视觉任务。"""def __init__(self, img_size=224, in_chans=3, num_classes=1000, embed_dims=[96, 192, 384, 768], depths=[2, 2, 6, 2]):"""初始化TinyViT模型。"""super().__init__()self.img_size = img_sizeself.num_classes = num_classes# 初始化补丁嵌入层self.patch_embed = PatchEmbed(in_chans=in_chans, embed_dim=embed_dims[0], resolution=img_size, activation=nn.GELU)# 构建层self.layers = nn.ModuleList()for i_layer in range(len(depths)):layer = BasicLayer(dim=embed_dims[i_layer], depth=depths[i_layer])self.layers.append(layer)# 分类头self.head = nn.Linear(embed_dims[-1], num_classes) if num_classes > 0 else nn.Identity()def forward(self, x):"""执行前向传播,返回分类结果。"""x = self.patch_embed(x) # 通过补丁嵌入层for layer in self.layers:x = layer(x) # 通过每一层return self.head(x) # 通过分类头class BasicLayer(nn.Module):"""基本的TinyViT层。"""def __init__(self, dim, depth):"""初始化基本层。"""super().__init__()self.blocks = nn.ModuleList([TinyViTBlock(dim) for _ in range(depth)])def forward(self, x):"""通过块处理输入。"""for blk in self.blocks:x = blk(x) # 通过每个块return xclass TinyViTBlock(nn.Module):"""TinyViT块,应用自注意力和局部卷积。"""def __init__(self, dim):"""初始化TinyViT块。"""super().__init__()self.attn = Attention(dim) # 自注意力层self.local_conv = Conv2d_BN(dim, dim, kernel_size=3, stride=1, padding=1) # 局部卷积层def forward(self, x):"""应用自注意力和局部卷积。"""x = self.attn(x) # 自注意力x = self.local_conv(x) # 局部卷积return xclass Attention(nn.Module):"""多头自注意力模块。"""def __init__(self, dim, num_heads=8):"""初始化注意力模块。"""super().__init__()self.num_heads = num_headsself.scale = dim ** -0.5 # 缩放因子self.qkv = nn.Linear(dim, dim * 3) # 查询、键、值的线性变换self.proj = nn.Linear(dim, dim) # 输出线性变换def forward(self, x):"""执行前向传播,计算注意力。"""B, N, C = x.shape # 批量大小、序列长度、通道数qkv = self.qkv(x).reshape(B, N, 3, self.num_heads, -1).permute(2, 0, 3, 1, 4) # 分离查询、键、值q, k, v = qkv[0], qkv[1], qkv[2] # 获取查询、键、值attn = (q @ k.transpose(-2, -1)) * self.scale # 计算注意力得分attn = attn.softmax(dim=-1) # 归一化x = (attn @ v).transpose(1, 2).reshape(B, N, C) # 计算输出return self.proj(x) # 线性变换输出
代码说明:
- Conv2d_BN: 该类实现了一个包含卷积和批量归一化的层。
- PatchEmbed: 将输入图像嵌入为补丁并投影到指定的嵌入维度。
- TinyViT: 主模型类,包含补丁嵌入和多个层。
- BasicLayer: 由多个TinyViT块组成的基本层。
- TinyViTBlock: 实现自注意力和局部卷积的块。
- Attention: 多头自注意力机制的实现。
这些类和方法构成了TinyViT模型的核心结构,适用于视觉任务的处理。```
这个程序文件实现了一个名为 TinyViT 的视觉模型架构,主要用于图像分类等视觉任务。该模型是基于一些现代卷积神经网络和变换器架构的设计,结合了移动反向瓶颈卷积(MBConv)和自注意力机制。文件中包含多个类,每个类负责模型的不同组成部分。
首先,文件引入了一些必要的库,包括 PyTorch 的核心模块和一些功能模块。接着定义了多个类:
-
Conv2d_BN:这是一个简单的卷积层,后接批归一化。它的构造函数接受多个参数以配置卷积操作的细节。
-
PatchEmbed:这个类负责将输入图像分割成小块(patches),并将这些小块投影到指定的嵌入维度。它使用两个卷积层来实现这一功能。
-
MBConv:这是实现移动反向瓶颈卷积的类,主要用于特征提取。它包含三个卷积层,分别用于扩展、深度卷积和压缩,使用激活函数进行非线性变换。
-
PatchMerging:该类用于合并相邻的特征块,并将其投影到新的维度。
-
ConvLayer:这个类由多个 MBConv 层组成,处理输入并返回激活后的输出。它还支持下采样和梯度检查点以节省内存。
-
Mlp:实现了多层感知机(MLP),用于对输入进行线性变换和激活。
-
Attention:实现了多头自注意力机制,能够根据输入的空间分辨率应用注意力偏置。
-
TinyViTBlock:这是 TinyViT 的基本构建块,结合了自注意力和局部卷积操作。
-
BasicLayer:表示 TinyViT 中的一个基本层,包含多个 TinyViTBlock,并支持下采样。
-
LayerNorm2d:实现了二维层归一化,用于对特征图进行归一化处理。
-
TinyViT:这是模型的主类,负责构建整个 TinyViT 架构。它接受多个参数来配置模型的各个层,包括输入图像的大小、通道数、类别数、嵌入维度、深度、注意力头数等。模型的构造包括了特征提取、层归一化和分类头。
在 TinyViT 类的构造函数中,首先初始化输入图像的大小、通道数和类别数,然后根据提供的参数构建不同的层。每一层都可能包含多个 TinyViTBlock,并在最后添加一个分类头。模型的前向传播方法通过调用各层的前向方法来处理输入数据,最终输出经过处理的特征。
整个模型的设计充分利用了现代深度学习的技术,旨在提高图像处理的效率和准确性。通过使用 MBConv 和自注意力机制,TinyViT 能够在保持较小模型体积的同时,获得较好的性能。
源码文件
源码获取
欢迎大家点赞、收藏、关注、评论啦 、查看👇🏻获取联系方式