patchmatch翻译总结
文章目录
- 近似最近邻算法
- 1 初始化
- 2 迭代
- 3收敛性证明
- 1. 至少一个偏移量被“精确”猜中的概率
- 2. 至少一个偏移量被“近似”猜中的概率
- 总结
- 一、核心思想
- 二、算法工作流程
- 三、关键优势与特性
- 四、主要应用场景
- 五、总结
问题:在图像B中找到图像A中每个patch(像素块)的最邻近(最相似)patch。
近似最近邻算法
我们系统的核心是计算区块(patch)对应关系的算法。我们将最近邻域(NNF)定义为偏移量的函数 f : A ↦ R²,该函数基于所有可能的区块坐标(即区块中心位置)定义在图像 A 上,并依据两个区块间的某种距离函数 D。给定图像 A 中的区块坐标 a 及其在图像 B 中对应的最近邻 b,f(a) 即为 b - a。我们将 f 的值称为偏移量,这些值存储在一个维度与 A 相同的数组中。
本节提出一种用于计算近似 NNF 的随机算法。需要强调的是,推动该算法发展的关键思路在于:我们在可能的偏移量空间中进行搜索,相邻偏移量会协同搜索,并且对于大尺寸图像中的许多区块而言,即便是随机偏移量也很有可能成为良好的初始猜测。(这里是算法的核心思想:1相邻patch具有相似的特征并且其图A相邻patch的在图B中的近邻距离相近;2对于随机初始化近邻距离,利用传播也可以得到一个良好的结果)
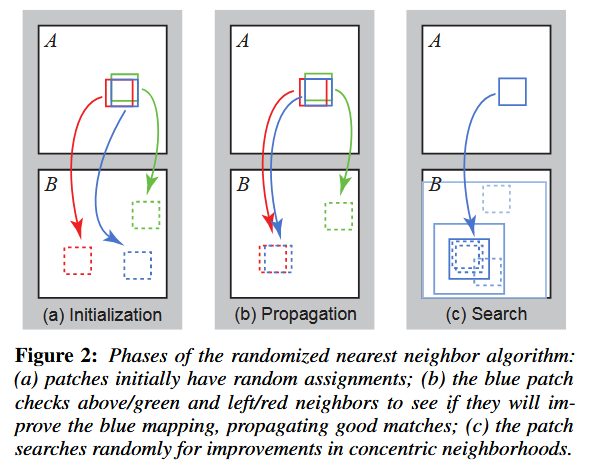
如图 2 所示,该算法包含三个主要组成部分。首先,最近邻域会以随机偏移量或某些先验信息进行初始化填充。随后对 NNF 实施迭代更新流程:将优质的区块偏移量传播至相邻像素,继而在当前最优偏移量邻域内进行随机搜索。第 3.1 节与 3.2 节将详细阐述这些步骤。
1 初始化
最近邻域(NNF)的初始化可通过两种方式实现:为字段分配随机值,或利用先验信息。采用随机偏移量初始化时,我们使用图像B全域范围内的独立均匀采样样本。
2 迭代
在初始化之后,我们执行一个迭代过程来改进最近邻域。算法的每次迭代按如下步骤进行:
按照扫描顺序(从左到右,从上到下)检查每个偏移量,并对每一个依次执行传播操作和随机搜索操作。这些操作在区块级别上是交错进行的:如果 Pj 和 Sj 分别表示对区块 j 的传播和随机搜索,那么执行顺序为:P1, S1, P2, S2, …, Pn, Sn。
传播
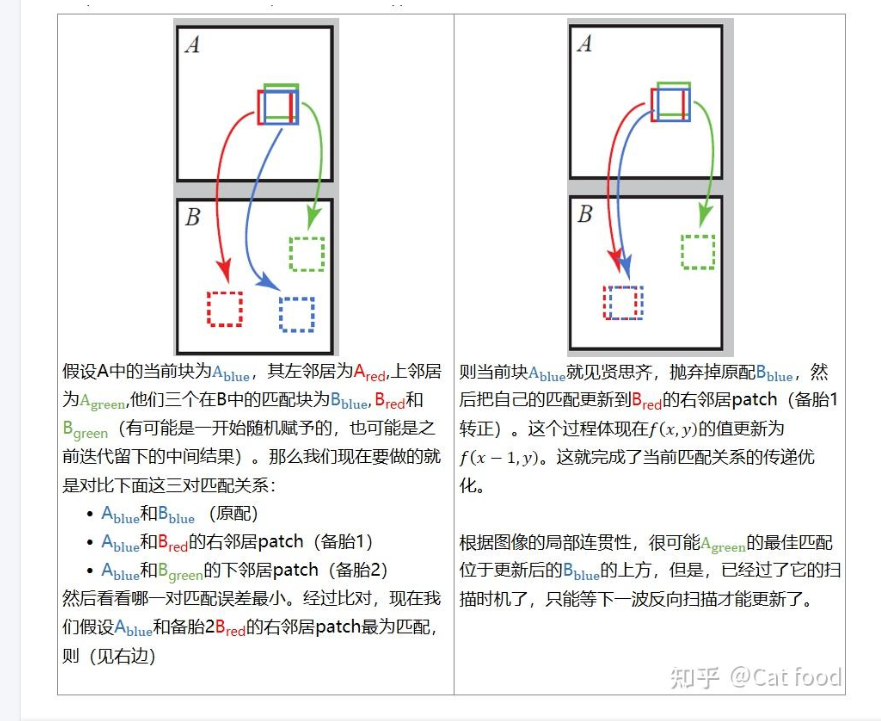
我们尝试利用 f(x-1, y) 和 f(x, y-1) 的已知偏移量来改进 f(x, y),这基于一个假设:相邻区块的偏移量很可能是相似的。例如,如果在 (x-1, y) 处存在一个良好的映射,我们会尝试将该映射向右平移一个像素,作为 (x, y) 处的候选映射。令 D(v)(D(v)是一个度量函数但是文章并未指明具体公式) 表示图像 A 中 (x, y) 处的区块与图像 B 中 (x, y)+v 处的区块之间的距离(误差)。我们将 f(x, y) 的新值取为 {D(f(x,y)), D(f(x-1,y)), D(f(x,y-1))} 中能使误差最小的那个偏移量。
这样做的效果是,如果 (x, y) 处有一个正确的映射并且处于一个连贯区域 R 内,那么位于 (x, y) 下方和右侧的整个区域 R 都将被填入正确的映射。此外,在偶数次迭代中,我们会通过反向扫描顺序(从右到左,从下到上)检查偏移量,以向上和向左传播信息,此时我们使用 f(x+1, y) 和 f(x, y+1) 作为候选偏移量。
随机搜索
在进行传播之后还可能陷入局部最优,因此进行随机搜索。
令 v0 = f(x, y)。我们尝试通过测试一系列候选偏移量来改进 f(x, y),这些候选偏移量到 v0 的距离呈指数级递减:
ui=v0+wαiRiui = v_0 + wα^i R_iui=v0+wαiRi
其中 R_i 是在 [-1,1] × [-1,1] 范围内的均匀随机向量,w 是一个较大的最大搜索"半径",α 是搜索窗口大小之间的固定比率。我们依次检查 i = 0, 1, 2, … 对应的候选区块,直到当前的搜索半径 wα^i 小于 1 个像素。在我们的应用中,除非特别说明,w 是图像的最大维度(宽度或高度),且 α = 1/2。
需要注意的是,搜索窗口必须被限制在图像 B 的边界之内。
终止条件
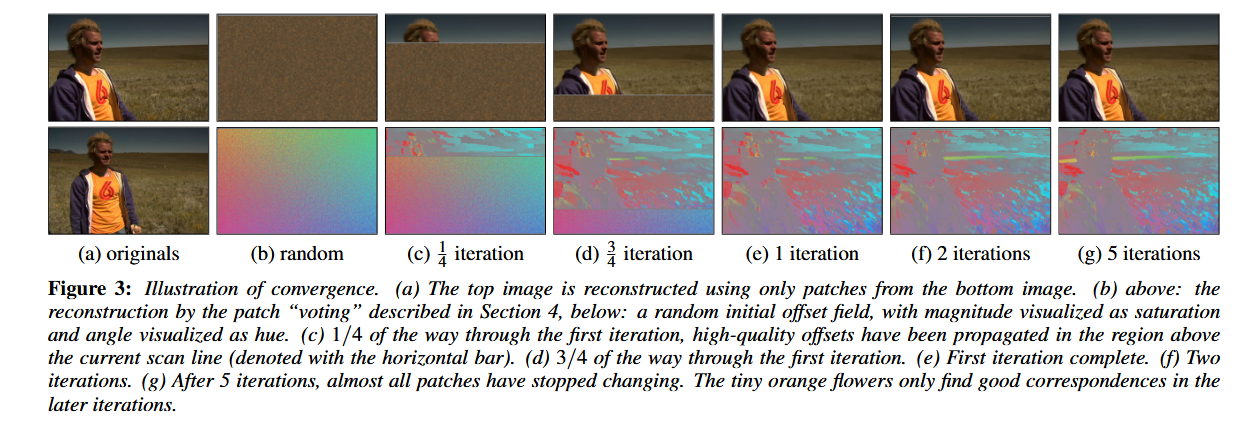
虽然根据具体应用场景可以采用不同的迭代终止准则,但我们发现在实践中,采用固定迭代次数的方案效果良好。本文展示的所有结果均通过总计4-5次迭代计算得出,在此迭代次数后,最近邻域几乎总能达到收敛状态。图3及附带视频直观展示了收敛过程。
效率优化
这种基础算法的效率可通过以下几种方式提升:
-
在传播和随机搜索阶段,当尝试用候选偏移量u来改进当前偏移量f(v)时,若计算D(u)的部分累加和已超过当前已知的最优距离D(f(v)),即可采用提前终止策略。
-
在传播阶段,当处理边长为p的方形区块并使用Lq范数时,通过利用重叠区域求和运算中的冗余项,可将距离变化量的计算复杂度从O(p²)降至O§。但需要注意的是,这种优化需要额外分配内存空间来存储当前最优距离D(f(x,y))。
3收敛性证明
我们的迭代算法在极限情况下会收敛至精确的最近邻域。在此我们对该收敛过程进行理论分析,证明算法以高概率在前几次迭代中实现最快收敛。更重要的是,我们证明了在仅需获得近似区块匹配的常见应用场景中,算法的收敛速度会进一步提升。因此,通过将计算限制在少量迭代次数内,我们的算法能够作为最优的近似算法使用。
我们首先分析算法向精确最近邻域的收敛特性,随后将分析延伸至更具实用价值的近似解收敛情形。假设图像A与B具有相同尺寸(M个像素)且采用随机初始化。虽然单个位置在初始猜测中被分配最佳偏移量的概率极小(1/M),但至少有一个偏移量被正确分配的概率相当可观——其值为(1 − (1 − 1/M)^M),对于较大的M约等于1 − 1/e。由于随机搜索在局部小范围内具有较高密度,我们也可将"正确"分配定义为:在正确偏移量周围C像素邻域内的任何分配。此类偏移量约经过一次随机搜索迭代即可被修正,而至少有一个偏移量落入此类邻域的概率极为显著:其值为(1 − (1 − C/M)^M),对于较大M约等于1 − exp(−C)。
解释:
1. 至少一个偏移量被“精确”猜中的概率
原句:
“至少有一个偏移量被正确分配的概率相当可观——其值为(1 − (1 − 1/M)^M),对于较大的M约等于1 − 1/e”
解释:
-
场景:我们有两张都是
M个像素的图像 A 和 B。初始化时,对于 A 中的每一个像素点,我们都从 B 中随机地挑选一个像素点作为它的对应点(即随机分配一个偏移量)。 -
“头奖”:我们关心的是,在所有这些随机的猜测中,至少有一个猜测是完全正确的概率有多大?所谓“完全正确”,就是指 A 中的某个点 a,恰好被分配给了它在 B 中真正的、最匹配的对应点 b。
-
计算过程:
-
对于某一次具体的猜测,它猜中“头奖”的概率是
1/M。那么它猜错的概率就是(1 - 1/M)。 -
我们一共进行
M次独立的猜测(因为图像有 M 个像素,每个像素都猜一次)。 -
所有 M 次猜测全都猜错的概率是:
(1 - 1/M) * (1 - 1/M) * ... * (1 - 1/M) = (1 - 1/M)^M。 -
所以,至少有一次猜对(即不是全错)的概率就是:
1 - (1 - 1/M)^M。
-
-
极限近似:
当图像尺寸 M 非常大时(这是一个符合现实的假设,例如一张100万像素的图片,M=1,000,000),(1 - 1/M)^M这个表达式趋近于自然常数e的倒数,即1/e。
因此,概率1 - (1 - 1/M)^M就趋近于1 - 1/e。 -
数值理解:
1 - 1/e ≈ 1 - 0.3679 ≈ 0.632 = 63.2%。
结论就是:即使在最随机的初始化状态下,也有超过63%的概率至少有一个像素点被分配到了它绝对正确的对应点。 这个概率是相当可观的,它为后续的算法传播提供了“火种”。
2. 至少一个偏移量被“近似”猜中的概率
原句:
“至少有一个偏移量落入此类邻域的概率极为显著:其值为(1 − (1 − C/M)^M),对于较大M约等于1 − exp(−C)”
解释:
-
放松标准:在实际情况中,我们不需要猜得“分毫不差”。只要猜到的点落在正确点周围的一个小邻域patch(假设这个邻域包含
C个像素)内,我们就认为这是一个“近似正确”的、足够好的猜测。在后续的随机搜索中,算法可以很快地从这个小邻域中找到精确解。 -
计算过程:
-
对于某一次猜测,它落入这个“正确邻域”的概率变成了
C/M(因为有利区域从1个像素变成了C个像素)。 -
那么,一次猜测没有落入这个邻域的概率是
(1 - C/M)。 -
所有 M 次猜测全都未落入邻域的概率是:
(1 - C/M)^M。 -
所以,至少有一次猜测落入邻域的概率是:
1 - (1 - C/M)^M。
-
-
极限近似:
当 M 很大时,(1 - C/M)^M趋近于exp(-C)。
因此,概率1 - (1 - C/M)^M就趋近于1 - exp(-C)。 -
数值理解与结论:
这个概率1 - exp(-C)的大小完全由邻域大小C决定。C不需要很大,这个概率就会变得非常高。-
如果
C = 3,概率≈ 1 - exp(-3) ≈ 1 - 0.05 ≈ 95% -
如果
C = 5,概率≈ 1 - exp(-5) ≈ 1 - 0.007 ≈ 99.3%
结论就是:只要我们把“正确”的标准放宽到一个很小的邻域内,那么在初始化阶段就获得至少一个“近似正确”匹配的概率几乎是必然的(接近100%)。
-
总结
PatchMatch是一种随机搜索算法,用于高效计算两幅图像之间密集的近似最近邻域。它的革命性在于,它通过巧妙的随机性和传播机制,在巨大的搜索空间中以极小的计算量获得高质量的结果,其速度比传统的暴力搜索快数个数量级。
一、核心思想
算法建立在三个关键洞见之上:
-
在偏移量空间搜索:不直接搜索匹配的像素块,而是搜索连接它们的偏移向量。这个偏移量场就是最近邻域。
-
空间一致性:自然图像中,相邻的像素块通常具有相似的偏移量。因此,好的偏移量可以传播给它的邻居(最核心思想)。
-
随机性的力量:即使在巨大的图像中,一个随机的偏移量也有很高的概率是某些像素块的“还不错”的猜测,这为算法提供了优化的起点。
二、算法工作流程
算法通过一个迭代过程来不断优化偏移量场,每次迭代包含两个核心步骤:
1. 初始化
- 将最近邻域用随机偏移量进行填充。虽然单个随机偏移量质量很差,但根据概率分析,在整个图像范围内,至少会有一些偏移量碰巧落在正确解的附近,这为后续迭代提供了“火种”。
2. 迭代优化 每个像素点会依次经历以下两个阶段:
-
传播 - 利用空间一致性
-
目的:将邻近像素已找到的好偏移量传递过来。
-
操作:检查当前像素左边和上边(在偶数次迭代时则为右边和下边)像素所使用的偏移量。将当前像素的偏移量与这些“邻居”的偏移量进行比较,选择其中能使得图像块差异最小的那个。
-
效果:像一个“好主意”在图像中蔓延。一旦某个区域找到一个正确偏移量,它会迅速像波浪一样传播到整个连续区域。
-
-
随机搜索 - 避免局部最优
-
目的:在当前位置附近进行精细搜索,并保留跳出局部最优解的可能性。
-
操作:以当前最佳偏移量为中心,在一个初始较大但指数级缩小的窗口内进行随机采样。公式为 (ui=v0+wαiRiu_i = v_0 + w\alpha^i R_iui=v0+wαiRi )。
-
效果:首先在较大范围内寻找可能更好的解,然后逐步收拢进行精细调整。这种策略平衡了“探索”和“利用”。
-
三、关键优势与特性
-
极高的效率:通过传播和随机搜索,避免了暴力搜索 (O(N^2)) 的复杂度,通常仅需 4-5次迭代 即可收敛。
-
易于实现:算法框架清晰,核心代码非常简洁。
-
理论保证:概率分析证明,即使从随机状态开始,算法也能以极高的概率快速收敛到一个良好的近似解。
-
灵活性:可以与金字塔 coarse-to-fine 策略结合,进一步提升性能和稳定性;也可以融入各种先验信息来初始化。
四、主要应用场景
PatchMatch的核心是寻找密集对应关系,因此其应用非常广泛,包括:
-
图像编辑:
-
图像补全/修复:从图像的其他部分复制纹理来填充缺失区域。
-
重排:重新排列图像中的物体。
-
-
纹理合成:根据样本纹理生成大尺寸的无缝纹理。
-
立体视觉与深度估计:为左右视图的像素寻找对应点,从而计算深度。
-
图像超分辨率:从低分辨率图像中找到高分辨率的细节块。
-
视频处理:应用于视频稳定、补全等。
五、总结
PatchMatch算法的精髓在于 “随机初始化提供火种,近邻传播步骤形成燎原之势,随机搜索步骤则负责局部精炼和突破”。它将计算机科学中经典的“随机化”与“局部搜索”思想相结合,以一种极其巧妙的方式解决了高维空间中的密集匹配问题,成为了计算机视觉和图形学领域一个里程碑式的算法。
参考:
解读PatchMatch: A Randomized Correspondence Algorithm for Structural Image Editing
Cat food的文章 - 知乎:
https://zhuanlan.zhihu.com/p/377230002