Science Robotics 研究综述:基于学习方法的机器人操作动力学模型
摘要Abstract 在日常生活中,我们往往不需要精确的物理公式,就能直觉地预测世界的变化:一推杯子,它会滑动;揉面团,它会变形。这种“直觉物理”让人类在复杂环境中能够自如应对。然而,对于机器人来说,想要达到类似的能力却并不容易。传统的物理建模方法虽然理论完备,但往往要求完整的状态信息,而现实环境下的数据却充满缺失与不确定。
学习动力学模型近年来,一种新的思路逐渐兴起——基于学习的动力学模型(learning-based dynamics models)。它们不依赖先验方程,而是直接从交互数据中“学会”预测未来。这不仅让机器人能够捕捉摩擦、变形、复杂接触等难以建模的因素,还能在实时控制中更快、更灵活。正如本文作者指出的,正是这些进步让机器人在操纵布料、面团、颗粒物等过去难以应对的任务上展现了惊人的能力。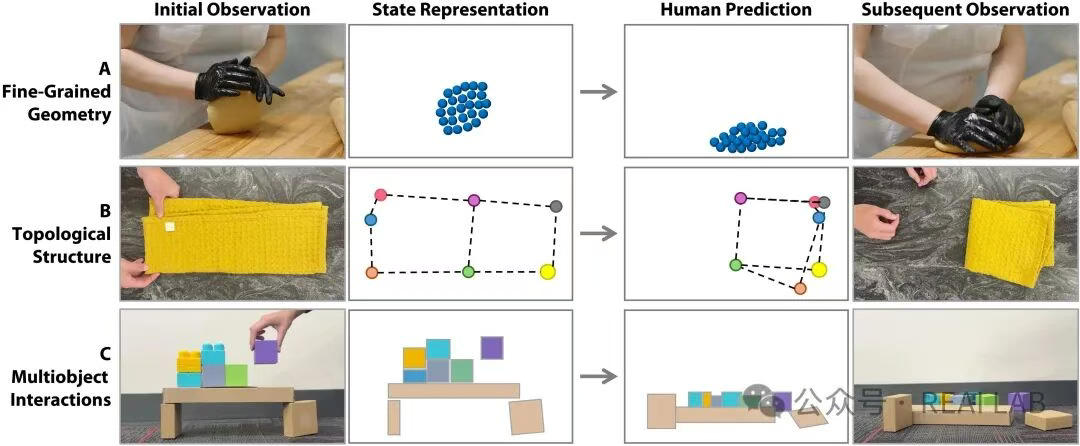
图1.如何工作模拟结果揭示了什么?(对应论文图2、3)论文从“状态表示”这一核心问题展开梳理。像素级表示能最大程度还原环境,但数据量庞大、学习成本高;潜在空间表示则通过压缩特征提升效率,却可能失去细节;粒子模型为三维物体提供精细刻画,适合变形物体,但依赖高质量的点云感知;关键点表示用稀疏点捕捉核心特征,适合衣物、工具等对象的控制;而面向对象的表示,则更接近人类直觉,以“物”为中心来建模交互。这些不同层次的抽象构成了一个光谱,如何平衡效率、泛化能力和可解释性,成为研究者们不断探索的课题。 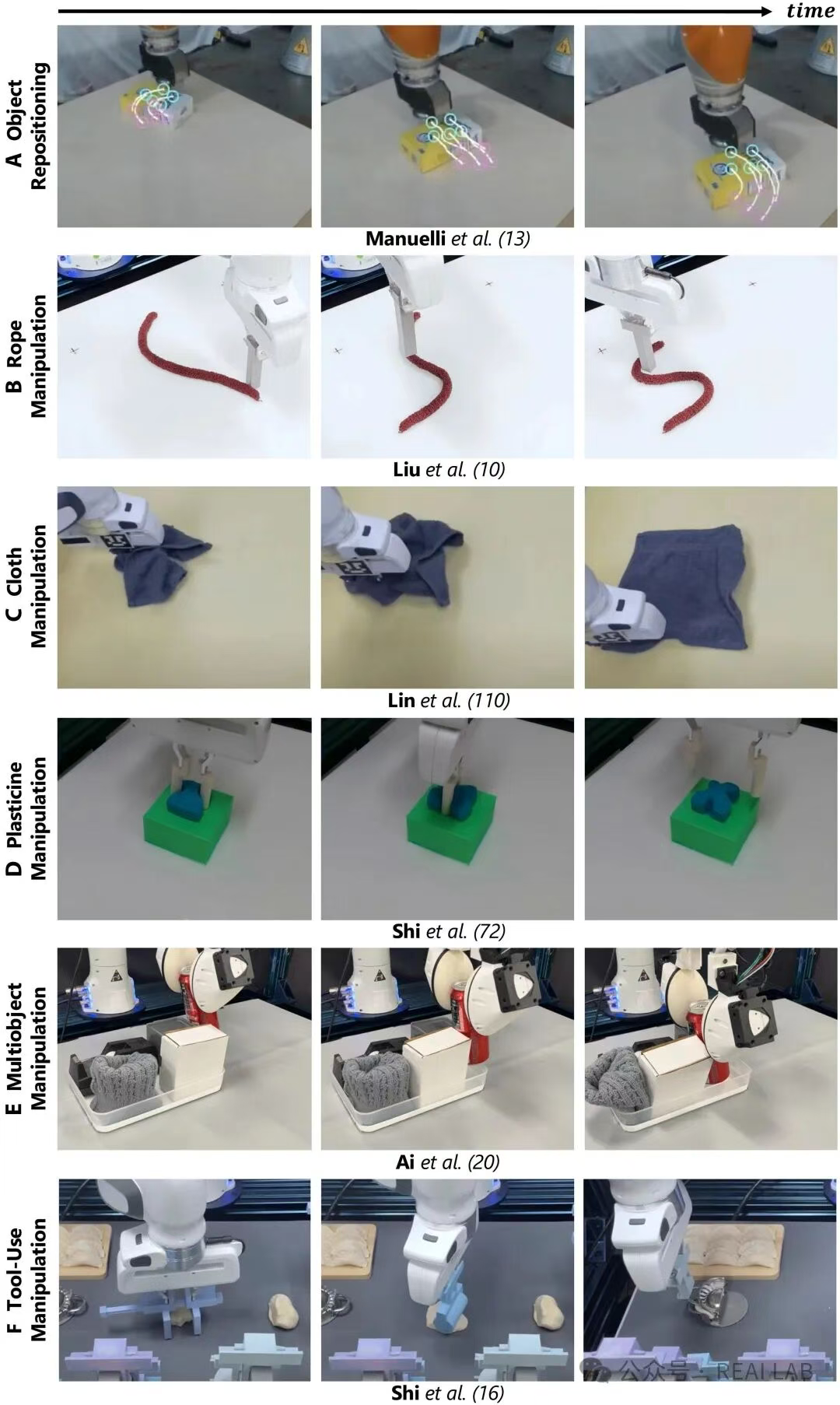
图2.物品抓取与识别机器人控制在控制层面,学习型动力学模型既可以结合运动规划,用于路径与轨迹优化,也可以与强化学习融合,为策略学习提供模拟环境。无论是简单的物体推移,还是长时间的柔性物体操作,多物体协作,甚至是工具使用,研究者都已经展示了令人期待的应用图景。从机器人包裹货物、做面食,到利用触觉与视觉多模态信息实现稳定控制,学习型动力学模型正在逐渐拓展机器人的边界。
行业价值当然,前路依旧漫长。如何在部分可观测环境中保持鲁棒?如何让模型具备跨场景的泛化能力?如何将图形学的新型三维表示(如高斯点渲染、神经辐射场)融入机器人控制?这些问题既是挑战,也是未来的突破口。作者特别提出,借鉴“基础模型”的思路,或许有机会训练出跨任务、跨场景的通用动力学模型,成为机器人领域真正的“基础设施”。这篇综述,不仅是对学习型动力学模型的全面梳理,更是一次面向未来的展望。它提醒我们,赋予机器人直觉物理的道路,可能并非纯粹的公式推演,而是数据、学习与结构偏置共同织就的故事。或许在不远的将来,机器人能像人类一样,不仅会“算”,更会“感知”和“预见”。