FreeRTOS消息队列
好久没有写代码了,有很多都忘记了,今天重新复习一下消息队列,使用标准库和hal库分别完成消息队列的实验
1.消息队列的使用
1.1 首先创建消息队列的句柄
QueueHandle_t queue_key;1.2使用api函数xQueueCreate( uxQueueLength, uxItemSize ) 进行队列的创建
queue_key = xQueueCreate(2,sizeof(uint8_t));if(queue_key != NULL){printf("queue_key队列创建成功 \r\n");}else{printf("queue_key队列创建失败 \r\n");}通过第一步创建的队列句柄queue_key接收队列创建函数的返回值,并进行判断
1.3使用xQueueSend( xQueue, pvItemToQueue, xTicksToWait )进行写入操作,运用如下例子所示
void task1(void *parameters)
{uint16_t key = 0;BaseType_t rev = 0;char * buff;buff = &buf[0];for(;;){key = Key_GetNum();if(key == 1){printf("key_1 按下,将小数据写入数组 \r\n");rev = xQueueSend(queue_key, &key, portMAX_DELAY );if(rev!=pdTRUE){printf("queue_key发送失败! \r\n");}LED1_Turn();}else if(key==2){printf("key_11 按下,将大据写入地址数组 \r\n");xQueueSend(queue_2, &buff, portMAX_DELAY );LED2_Turn();}}vTaskDelay(10);
}1.4BaseType_t xQueueReceive( QueueHandle_t xQueue,void * const pvBuffer, TickType_t xTicksToWait )进行出队列操作,也即从队列接收数据(取数据)
void task2(void *parameters)
{BaseType_t rev = 0;uint8_t key_val = 0;for(;;){rev = xQueueReceive(queue_key,&key_val,portMAX_DELAY);if(rev != pdTRUE){printf("读取queue_key 失败!\r\n");}else{printf("读取queue_key 成功,键值为%d \r\n",key_val);}}
}2.实验
实验目的:实现队列的入队和出队操作
实验设计:将四个任务:start_task、task1、task2、task3
start_task:用来创建task1-task3任务
task1:当key_0按下,将键值拷贝到队列queue_key;当key_1按下,将传输字符串数据,这里通过拷贝字符串的首地址入队(queue_strdata)实现传输字符串
task2: 读取queue_key队列的数据
task3: 读取queue_strdata的数据
2.1标准库
main.c
#include "stm32f10x.h" // Device header
#include "Delay.h"
#include "OLED.h"
#include "Serial.h"
#include "FreeRTOS.h"
#include "task.h"
#include "LED.h"
#include "FreeRTOSConfig.h"
#include "timers.h"
#include "freertos_demo.h"
#include "Key.h"
#include "queue.h"
uint8_t RxData; //定义用于接收串口数据的变量int main(void)
{LED_Init();Key_Init();/*串口初始化*/Serial_Init(); //串口初始化freertos_demo();return 0;}
其中freertos_demo()包含所有队列的操作
#include "freertos_demo.h"
#include "stm32f10x.h" // Device header
#include "Delay.h"
#include "OLED.h"
#include "Serial.h"
#include "FreeRTOS.h"
#include "task.h"
#include "LED.h"
#include "FreeRTOSConfig.h"
#include "timers.h"
#include "stdio.h"
#include "Key.h"
#include "queue.h"#define START_TASK_PRIO 1
#define START_TASK_STACK_SIZE 128
TaskHandle_t start_task_handler;
void start_task( void * pvParameters );//vtask1 实现入队
#define TASK1_STACK_SIZE 128
#define TASK1_PRIO 2
TaskHandle_t task1_handler;
void task1(void *parameters);//vtask2 实现小数据出队
#define TASK2_STACK_SIZE 128
#define TASK2_PRIO 3
TaskHandle_t task2_handler;
void task2(void *parameters);//vtask3 实现大数据出队
#define TASK3_STACK_SIZE 128
#define TASK3_PRIO 4
TaskHandle_t task3_handler;
void task3(void *parameters);// ctreate queue
QueueHandle_t queue_key;/*小数据*/
QueueHandle_t queue_2;/*大数据*/char buf[100] = "这是一个大数组,12345n";
void freertos_demo(void)
{queue_key = xQueueCreate(2,sizeof(uint8_t));if(queue_key != NULL){printf("queue_key队列创建成功 \r\n");}else{printf("queue_key队列创建失败 \r\n");}queue_2 = xQueueCreate(2,sizeof(char *));if(queue_2 != NULL){printf("queue_2队列创建成功 \r\n");}else{printf("queue_2队列创建失败 \r\n");}xTaskCreate((TaskFunction_t ) start_task,(char * ) "start_task",(configSTACK_DEPTH_TYPE ) START_TASK_STACK_SIZE,(void * ) NULL,(UBaseType_t ) START_TASK_PRIO,(TaskHandle_t * ) &start_task_handler );vTaskStartScheduler();
}void start_task(void *parameters)
{//进入临界区taskENTER_CRITICAL();xTaskCreate((TaskFunction_t ) task1,(char * ) "task1",(configSTACK_DEPTH_TYPE ) TASK1_STACK_SIZE,(void * ) NULL,(UBaseType_t ) TASK1_PRIO,(TaskHandle_t * ) &task1_handler );xTaskCreate((TaskFunction_t ) task2,(char * ) "task2",(configSTACK_DEPTH_TYPE ) TASK2_STACK_SIZE,(void * ) NULL,(UBaseType_t ) TASK2_PRIO,(TaskHandle_t * ) &task2_handler );xTaskCreate((TaskFunction_t ) task3,(char * ) "task3",(configSTACK_DEPTH_TYPE ) TASK3_STACK_SIZE,(void * ) NULL,(UBaseType_t ) TASK3_PRIO,(TaskHandle_t * ) &task3_handler );//退出临界区vTaskDelete(NULL);taskEXIT_CRITICAL();
}void task1(void *parameters)
{uint16_t key = 0;BaseType_t rev = 0;char * buff;buff = &buf[0];for(;;){key = Key_GetNum();if(key == 1){printf("key_1 按下,将小数据写入数组 \r\n");rev = xQueueSend(queue_key, &key, portMAX_DELAY );if(rev!=pdTRUE){printf("queue_key发送失败! \r\n");}LED1_Turn();}else if(key==2){printf("key_11 按下,将大据写入地址数组 \r\n");xQueueSend(queue_2, &buff, portMAX_DELAY );LED2_Turn();}}vTaskDelay(10);
}void task2(void *parameters)
{BaseType_t rev = 0;uint8_t key_val = 0;for(;;){rev = xQueueReceive(queue_key,&key_val,portMAX_DELAY);if(rev != pdTRUE){printf("读取queue_key 失败!\r\n");}else{printf("读取queue_key 成功,键值为%d \r\n",key_val);}}
}void task3(void *parameters)
{BaseType_t rev = 0;char* buff;for(;;){rev = xQueueReceive(queue_2,&buff,portMAX_DELAY);if(rev != pdTRUE){printf("读取queue_2 失败!\r\n");}else{printf("读取queue_2 成功,键值为 %s\r\n",buff);}}
}
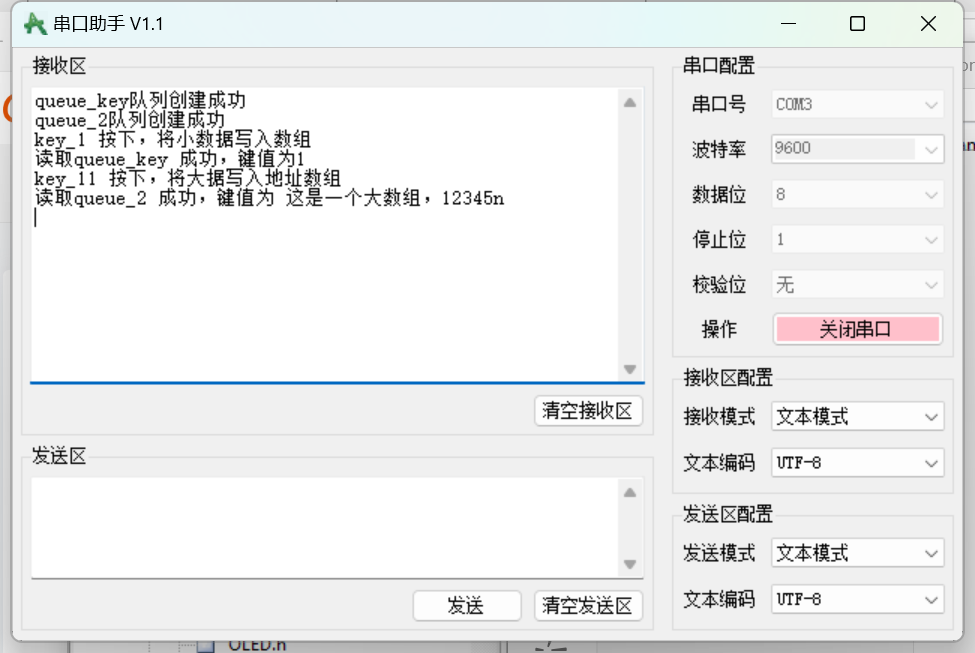
实验结果:
2.2hal库
main.c
/* USER CODE BEGIN Header */
/********************************************************************************* @file : main.c* @brief : Main program body******************************************************************************* @attention** Copyright (c) 2024 STMicroelectronics.* All rights reserved.** This software is licensed under terms that can be found in the LICENSE file* in the root directory of this software component.* If no LICENSE file comes with this software, it is provided AS-IS.********************************************************************************/#include <stdio.h>
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
#include "usart.h"
#include "gpio.h"/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
#include "FreeRTOS.h"
#include "task.h"
#include "queue.h"
#include "Key.h"
#include "led.h"
/* USER CODE END Includes *//* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD *//* USER CODE END PTD *//* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
#define LED1_GPIO_Port GPIOB
#define LED1_Pin GPIO_PIN_1
#define LED2_GPIO_Port GPIOB
#define LED2_Pin GPIO_PIN_11/* USER CODE END PD *//* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM *//* USER CODE END PM *//* Private variables ---------------------------------------------------------*//* USER CODE BEGIN PV *//* USER CODE END PV *//* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
/* USER CODE BEGIN PFP *//* USER CODE END PFP *//* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
/* USER CODE BEGIN 0 */
#include <stdio.h>#ifdef __GNUC__#define PUTCHAR_PROTOTYPE int _io_putchar(int ch)#else#define PUTCHAR_PROTOTYPE int fputc(int ch, FILE *f)#endif /* __GNUC__*//*******************************************************************@brief Retargets the C library printf function to the USART.*@param None*@retval None******************************************************************/PUTCHAR_PROTOTYPE{HAL_UART_Transmit(&huart1, (uint8_t *)&ch,1,0xFFFF);return ch;}#define START_TASK_PRIO 1
#define START_TASK_STACK_SIZE 128
TaskHandle_t start_task_handler;
void start_task( void * pvParameters );//vtask1 实现入队
#define TASK1_STACK_SIZE 128
#define TASK1_PRIO 2
TaskHandle_t task1_handler;
void task1(void *parameters);//vtask2 实现小数据出队
#define TASK2_STACK_SIZE 128
#define TASK2_PRIO 3
TaskHandle_t task2_handler;
void task2(void *parameters);//vtask3 实现大数据出队
#define TASK3_STACK_SIZE 128
#define TASK3_PRIO 4
TaskHandle_t task3_handler;
void task3(void *parameters);QueueHandle_t queue_key;
QueueHandle_t queue_strdata;char buff[100] = "this is a test for transmmit a data to queue!";void start_task(void *parameters)
{//进入临界taskENTER_CRITICAL();xTaskCreate((TaskFunction_t ) task1,(char * ) "task1",(configSTACK_DEPTH_TYPE ) TASK1_STACK_SIZE,(void * ) NULL,(UBaseType_t ) TASK1_PRIO,(TaskHandle_t * ) &task1_handler );xTaskCreate((TaskFunction_t ) task2,(char * ) "task2",(configSTACK_DEPTH_TYPE ) TASK2_STACK_SIZE,(void * ) NULL,(UBaseType_t ) TASK2_PRIO,(TaskHandle_t * ) &task2_handler );xTaskCreate((TaskFunction_t ) task3,(char * ) "task3",(configSTACK_DEPTH_TYPE ) TASK3_STACK_SIZE,(void * ) NULL,(UBaseType_t ) TASK3_PRIO,(TaskHandle_t * ) &task3_handler );//出临界区vTaskDelete(NULL);taskEXIT_CRITICAL();
}void task1(void *parameters)
{BaseType_t rev = 0 ;uint8_t key = 0;char *buf;buf = buff;while(1){key = Key_GetNum();if(key == 1){printf("Key0被按下 \r\n");rev = xQueueSend( queue_key, &key, portMAX_DELAY );if(rev != pdTRUE){printf("queue_key写入队列失败! \r\n");}LED1_Turn();}if(key == 2){printf("Key1被按下 \r\n");rev = xQueueSend( queue_strdata, &buf, portMAX_DELAY );if(rev != pdTRUE){printf("queue_strdata写入队列失败! \r\n");}LED2_Turn();}}vTaskDelay(10);
}void task2(void *parameters)
{BaseType_t rev = 0;uint8_t key_val = 0;while(1){rev = xQueueReceive(queue_key,&key_val,portMAX_DELAY);if(rev != pdTRUE){printf("读取queue_key 失败!\r\n");}else{printf("读取queue_key 成功,键值为%d \r\n",key_val);}}//vTaskDelay(500);
}
void task3(void *parameters)
{BaseType_t rev = 0;char* buf = 0;while(1){rev = xQueueReceive(queue_strdata,&buf,portMAX_DELAY);if(rev != pdTRUE){printf("读取queue_strdata 失败!\r\n");}else{printf("读取queue_strdata 成功,键值为 %s\r\n",buf);}}}
void freertos_demo(void)
{/*创建队列*/queue_key = xQueueCreate(2,sizeof(uint8_t));if(queue_key!=NULL){printf("queue_key队列创建成功 \r\n");}elseprintf("queue_key队列创建失败 \r\n");queue_strdata = xQueueCreate(2,sizeof(char *));if(queue_strdata!=NULL){printf("queue_strdata队列创建成功 \r\n");}elseprintf("queue_strdata队列创建失败 \r\n");xTaskCreate((TaskFunction_t ) start_task,(char * ) "start_task",(configSTACK_DEPTH_TYPE ) START_TASK_STACK_SIZE,(void * ) NULL,(UBaseType_t ) START_TASK_PRIO,(TaskHandle_t * ) &start_task_handler );vTaskStartScheduler();}
/* USER CODE END 0 *//*** @brief The application entry point.* @retval int*/
int main(void)
{/* USER CODE BEGIN 1 *//* USER CODE END 1 *//* MCU Configuration--------------------------------------------------------*//* Reset of all peripherals, Initializes the Flash interface and the Systick. */HAL_Init();/* USER CODE BEGIN Init *//* USER CODE END Init *//* Configure the system clock */SystemClock_Config();/* USER CODE BEGIN SysInit *//* USER CODE END SysInit *//* Initialize all configured peripherals */MX_GPIO_Init();MX_USART1_UART_Init();/* USER CODE BEGIN 2 */freertos_demo();return 0;/* USER CODE END 2 *//* Infinite loop *//* USER CODE BEGIN WHILE */
// while (1)
// {/* USER CODE END WHILE *//* USER CODE BEGIN 3 */
//
//
// }/* USER CODE END 3 */
}/*** @brief System Clock Configuration* @retval None*/
void SystemClock_Config(void)
{RCC_OscInitTypeDef RCC_OscInitStruct = {0};RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};/** Initializes the RCC Oscillators according to the specified parameters* in the RCC_OscInitTypeDef structure.*/RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE;RCC_OscInitStruct.HSEState = RCC_HSE_ON;RCC_OscInitStruct.HSEPredivValue = RCC_HSE_PREDIV_DIV1;RCC_OscInitStruct.HSIState = RCC_HSI_ON;RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE;RCC_OscInitStruct.PLL.PLLMUL = RCC_PLL_MUL9;if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK){Error_Handler();}/** Initializes the CPU, AHB and APB buses clocks*/RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV2;RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1;if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_2) != HAL_OK){Error_Handler();}
}/* USER CODE BEGIN 4 *//* USER CODE END 4 *//*** @brief Period elapsed callback in non blocking mode* @note This function is called when TIM2 interrupt took place, inside* HAL_TIM_IRQHandler(). It makes a direct call to HAL_IncTick() to increment* a global variable "uwTick" used as application time base.* @param htim : TIM handle* @retval None*/
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim)
{/* USER CODE BEGIN Callback 0 *//* USER CODE END Callback 0 */if (htim->Instance == TIM2) {HAL_IncTick();}/* USER CODE BEGIN Callback 1 *//* USER CODE END Callback 1 */
}/*** @brief This function is executed in case of error occurrence.* @retval None*/
void Error_Handler(void)
{/* USER CODE BEGIN Error_Handler_Debug *//* User can add his own implementation to report the HAL error return state */__disable_irq();while (1){}/* USER CODE END Error_Handler_Debug */
}#ifdef USE_FULL_ASSERT
/*** @brief Reports the name of the source file and the source line number* where the assert_param error has occurred.* @param file: pointer to the source file name* @param line: assert_param error line source number* @retval None*/
void assert_failed(uint8_t *file, uint32_t line)
{/* USER CODE BEGIN 6 *//* User can add his own implementation to report the file name and line number,ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) *//* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT */
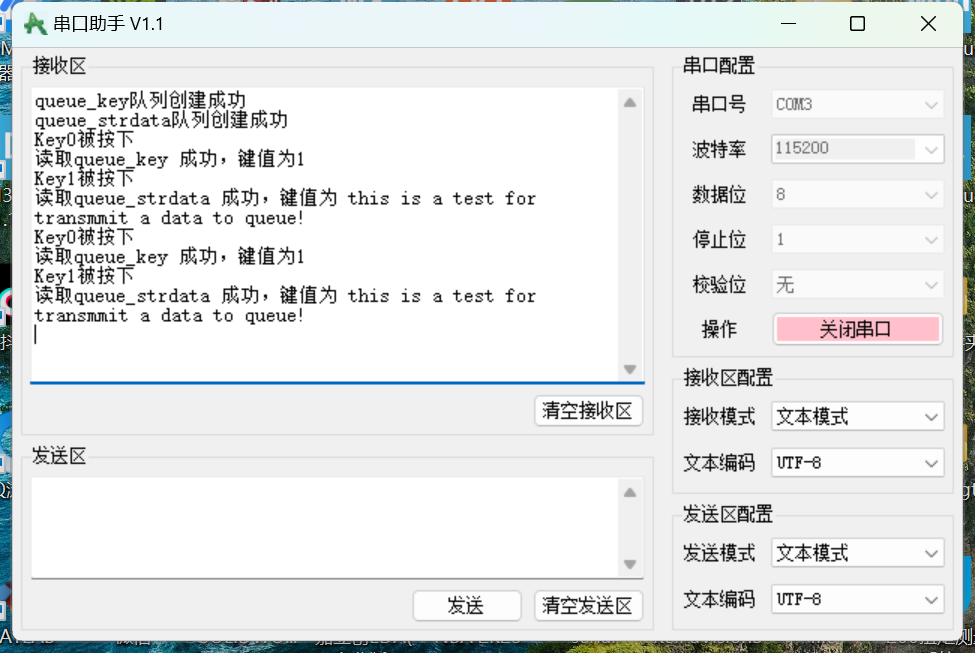
实验结果:
ps:完整工程访问FreeRTOS消息队列实验-hal库资源-CSDN下载和FreeRTOS消息队列-标准库资源-CSDN下载