PID控制器的不同的传递函数与参数形式
一、时域表达式
PID控制器是基于经典控制理论的一种控制策略,其算法简单实用,PID控制并不要求受控对象的精准数学模型,这使得PID控制在工业生产过程中应用十分广泛。连续PID控制器的时域一般表达式为
比例系数Kp、积分系数Ki和微分系数Kd分别是对系统误差信号e(t)及其积分与微分
的加权系数。
PID控制器通过对误差信号e(t)的加权计算,得到控制信号u(t),驱动受控对象,使得误差e(t)按减少的方向变化,从而达到控制要求。
在线性定常系统中,当初始条件为零时,系统输出拉氏变换与输入拉氏变换的比,称为传递函数,用G(S)表示。输入与输出之间的关系仅取决于电路的结构形式及其参数(固有特性),与输入的具体形式无关,无论输入如何,系统都以相同的传递作用输出信息或能量,因此称之为传递函数。
二、复频域传递函数
对上述公式做拉普拉斯变换,得到连续PID控制器的复频域传递函数
Kp是比例系数,是积分时间常数,
是微分时间常数。
当Ti->,Td=0时,G(s)=Kp,为比例(P)控制器;
当Td=0时,,为比例积分(PI)控制器;
当Ti->时,G(s)=Kp(1+Tds),为比例微分(PD)控制器。
三、近似传递函数
为避免纯微分计算,常用一阶超前环节去近似纯微分环节,PID控制器的传递函数为
式中,N->时,为纯微分运算。实际中,N不必过大,一般取N=10,就可以逼近实际的微分效果。在matlab的PID控制器中,N的默认值为100,值为上式中的N/Td=10/Td。
四、Matlab中PID控制器的传递函数
1、理想型补偿器公式
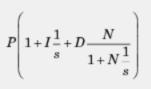
对于控制器参数整定来说,此时P=Kp,,
。
2、并行型补偿器公式
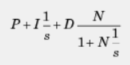
对于控制器参数整定来说,此时P=Kp,,
。
五、结论
整定的时候,会计算出Ti,Td,有了这些换算关系,可以方便的算出Matlab中的P值、I值、D值,从而方便的进行仿真。