【学习记录】vscode+ros2+cpp调试
本文仅用于个人记录。
参考:https://zhuanlan.zhihu.com/p/697007274
1. 安装插件
ROS2
C/C++
2. 编译指令
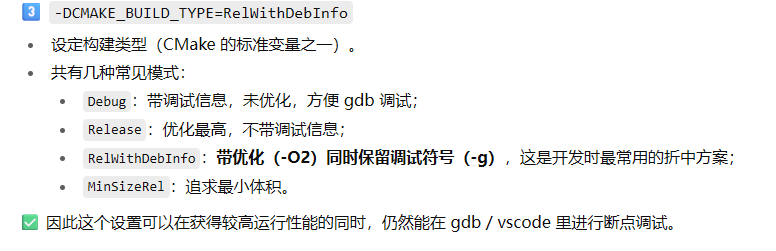
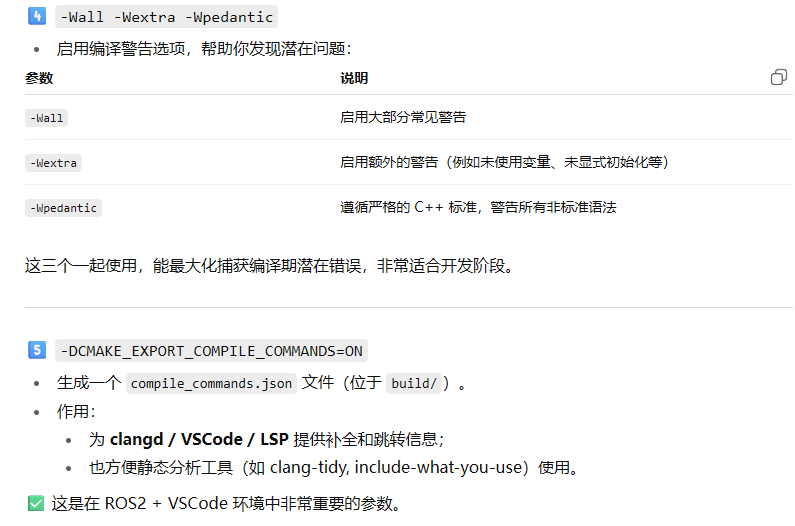
colcon build \--cmake-args -DCMAKE_BUILD_TYPE=RelWithDebInfo\-Wall -Wextra -Wpedantic \-DCMAKE_EXPORT_COMPILE_COMMANDS=ON \--symlink-install
指令说明:

3.配置文件 settings.json
完成编译后,使用 F1 打开指令栏,输入:ROS: Update C++ Properties 然后确认。
这会帮你在 .vscode 文件夹下生成 c_cpp_properties.json 和 settings.json 文件。这会帮你的 vscode 理解项目依赖的路径。
不用在意c_cpp_properties,因为我采用的是clangd。只需要修改settings.json:
settings.json
{"C_Cpp.intelliSenseEngine": "disabled","clangd.arguments": ["--compile-commands-dir=."],"clangd.completion.completeBrackets": false,"ROS2.distro": "jazzy","ROS2.rosSetupScript": "${workspaceFolder}/install/setup.bash",
}
重点是最后两行, 用的是ROS2的jazzy,和对应的setup.bash
4. 调试启动程序 launch
launch.json
单一节点的启动程序
{"version": "0.2.0","configurations": [{"name": "C++ Debugger","request": "launch","type": "cppdbg","cwd": "/","program": "${workspaceFolder}/install/p2v/lib/p2v/lio_node"}]
}
5. 开始调试
使用 ctrl+shift+d 打开 Run and debug 栏,选择你的配置文件,然后点击 F5 就可以对程序进行断点调试了。对于多个节点的程序调试起来也没问题。
可以打断点、或者在断的地方进行输出调试。