在Robosuite中如何使用Xbox游戏手柄操控mujoco仿真中的机械臂?
在Robosuite中使用Xbox游戏手柄采集机械臂数据
Robosuite是一个基于MuJoCo物理引擎的机器人学习模拟框架,它提供了丰富的基准环境,用于机器人学习研究。作为一个开源项目,它支持多种输入设备,如键盘和SpaceMouse,但默认并不支持Xbox游戏手柄。在实际应用中,尤其是数据采集时,使用游戏手柄可以提供更直观的控制体验,特别是对于3D操作。
在Robosuite的collect_human_demonstrations.py脚本,添加了对Xbox手柄的支持。
为什么需要修改?
Robosuite的原脚本位于robosuite/scripts/collect_human_demonstrations.py,它允许用户通过键盘或SpaceMouse采集人类演示数据,用于后续的模仿学习或强化学习。但Xbox手柄(或类似游戏控制器)在机器人控制中很常见,因为它有模拟摇杆和触发器,能更好地模拟6自由度(6-DoF)操作。
原脚本不支持pygame驱动的游戏手柄,因此需要:
- 创建一个新的设备类,封装Xbox手柄的输入映射。
- 修改主脚本的设备初始化部分,添加对"xbox"的支持。
参考了Robosuite的spacemouse.py和keyboard.py,我确保了新类的兼容性,包括位置敏感度、旋转敏感度、抓取控制等。
修改步骤
步骤1: 创建Xbox设备类
在robosuite/devices/目录下创建一个新文件xbox.py。这个类继承自Device,使用pygame库读取手柄输入。
- 初始化pygame并检测手柄。
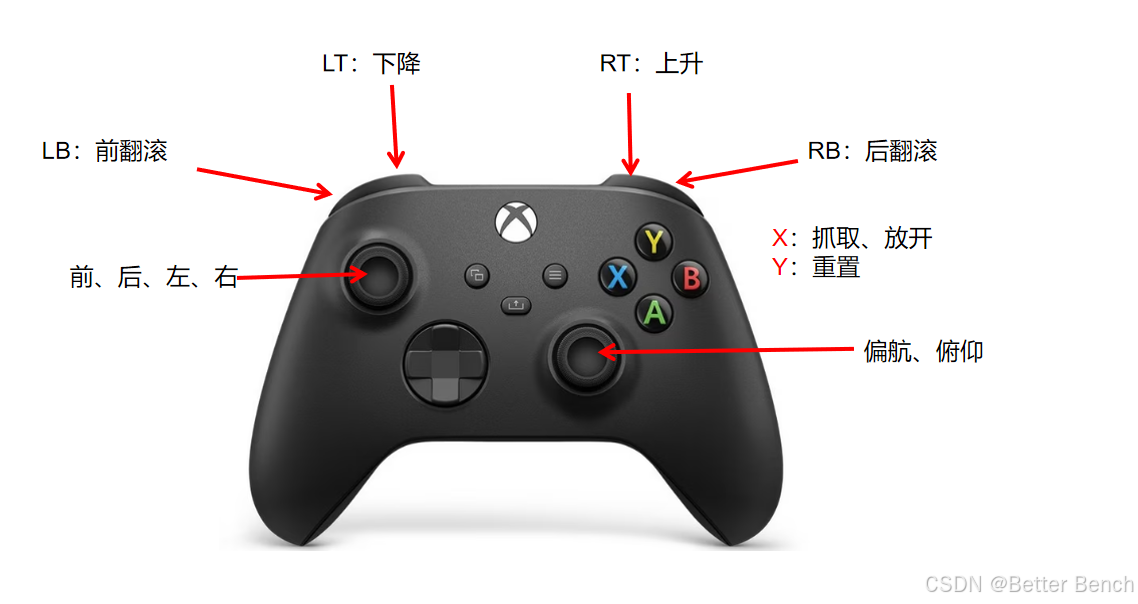
- 映射手柄轴和按钮到6-DoF控制:左摇杆控制x-y平面移动,LT/RT触发器控制z轴,右摇杆控制俯仰和偏航,LB/RB控制滚转。
- 处理抓取:使用X按钮按一次切换开/合(类似于键盘的空格键)。
- 处理重置:Y按钮按一次重置模拟。
- 添加键盘辅助控制(如切换臂或机器人)。
步骤2: 修改主脚本
在robosuite/scripts/collect_human_demonstrations.py中,修改设备初始化部分:
- 添加
elif args.device == "xbox":分支,导入并实例化Xbox类。 - 确保其他部分(如动作处理)兼容新设备。
修改后,运行脚本时可以使用--device xbox参数。
修改后的完整代码
collect_human_demonstrations.py
"""
A script to collect a batch of human demonstrations.The demonstrations can be played back using the `playback_demonstrations_from_hdf5.py` script.
"""import argparse
import datetime
import json
import os
import time
from glob import globimport h5py
import numpy as npimport robosuite as suite
from robosuite.controllers import load_composite_controller_config
from robosuite.controllers.composite.composite_controller import WholeBody
from robosuite.wrappers import DataCollectionWrapper, VisualizationWrapperdef collect_human_trajectory(env, device, arm, max_fr):"""Use the device (keyboard or SpaceNav 3D mouse) to collect a demonstration.The rollout trajectory is saved to files in npz format.Modify the DataCollectionWrapper wrapper to add new fields or change data formats.Args:env (MujocoEnv): environment to controldevice (Device): to receive controls from the devicearms (str): which arm to control (eg bimanual) 'right' or 'left'max_fr (int): if specified, pause the simulation whenever simulation runs faster than max_fr"""env.reset()env.render()task_completion_hold_count = -1 # counter to collect 10 timesteps after reaching goaldevice.start_control()for robot in env.robots:robot.print_action_info_dict()# Keep track of prev gripper actions when using since they are position-based and must be maintained when arms switchedall_prev_gripper_actions = [{f"{robot_arm}_gripper": np.repeat([0], robot.gripper[robot_arm].dof)for robot_arm in robot.armsif robot.gripper[robot_arm].dof > 0}for robot in env.robots]# Loop until we get a reset from the input or the task completeswhile True:start = time.time()# Set active robotactive_robot = env.robots[device.active_robot]# Get the newest actioninput_ac_dict = device.input2action()# If action is none, then this a reset so we should breakif input_ac_dict is None:breakfrom copy import deepcopyaction_dict = deepcopy(input_ac_dict) # {}# set arm actionsfor arm in active_robot.arms:if isinstance(active_robot.composite_controller, WholeBody): # input type passed to joint_action_policycontroller_input_type = active_robot.composite_controller.joint_action_policy.input_typeelse:controller_input_type = active_robot.part_controllers[arm].input_typeif controller_input_type == "delta":action_dict[arm] = input_ac_dict[f"{arm}_delta"]elif controller_input_type == "absolute":action_dict[arm] = input_ac_dict[f"{arm}_abs"]else:raise ValueError# Maintain gripper state for each robot but only update the active robot with actionenv_action = [robot.create_action_vector(all_prev_gripper_actions[i]) for i, robot in enumerate(env.robots)]env_action[device.active_robot] = active_robot.create_action_vector(action_dict)env_action = np.concatenate(env_action)for gripper_ac in all_prev_gripper_actions[device.active_robot]:all_prev_gripper_actions[device.active_robot][gripper_ac] = action_dict[gripper_ac]env.step(env_action)env.render()# Also break if we complete the taskif task_completion_hold_count == 0:break# state machine to check for having a success for 10 consecutive timestepsif env._check_success():if task_completion_hold_count > 0:task_completion_hold_count -= 1 # latched state, decrement countelse:task_completion_hold_count = 10 # reset count on first success timestepelse:task_completion_hold_count = -1 # null the counter if there's no success# limit frame rate if necessaryif max_fr is not None:elapsed = time.time() - startdiff = 1 / max_fr - elapsedif diff > 0:time.sleep(diff)# cleanup for end of data collection episodesenv.close()def gather_demonstrations_as_hdf5(directory, out_dir, env_info):"""Gathers the demonstrations saved in @directory into asingle hdf5 file.The strucure of the hdf5 file is as follows.data (group)date (attribute) - date of collectiontime (attribute) - time of collectionrepository_version (attribute) - repository version used during collectionenv (attribute) - environment name on which demos were collecteddemo1 (group) - every demonstration has a groupmodel_file (attribute) - model xml string for demonstrationstates (dataset) - flattened mujoco statesactions (dataset) - actions applied during demonstrationdemo2 (group)...Args:directory (str): Path to the directory containing raw demonstrations.out_dir (str): Path to where to store the hdf5 file.env_info (str): JSON-encoded string containing environment information,including controller and robot info"""hdf5_path = os.path.join(out_dir, "demo.hdf5")f = h5py.File(hdf5_path, "w")# store some metadata in the attributes of one groupgrp = f.create_group("data")num_eps = 0env_name = None # will get populated at some pointfor ep_directory in os.listdir(directory):state_paths = os.path.join(directory, ep_directory, "state_*.npz")states = []actions = []success = Falsefor state_file in sorted(glob(state_paths)):dic = np.load(state_file, allow_pickle=True)env_name = str(dic["env"])states.extend(dic["states"])for ai in dic["action_infos"]:actions.append(ai["actions"])success = success or dic["successful"]if len(states) == 0:continue# Add only the successful demonstration to datasetif success:print("Demonstration is successful and has been saved")# Delete the last state. This is because when the DataCollector wrapper# recorded the states and actions, the states were recorded AFTER playing that action,# so we end up with an extra state at the end.del states[-1]assert len(states) == len(actions)num_eps += 1ep_data_grp = grp.create_group("demo_{}".format(num_eps))# store model xml as an attributexml_path = os.path.join(directory, ep_directory, "model.xml")with open(xml_path, "r") as f:xml_str = f.read()ep_data_grp.attrs["model_file"] = xml_str# write datasets for states and actionsep_data_grp.create_dataset("states", data=np.array(states))ep_data_grp.create_dataset("actions", data=np.array(actions))else:print("Demonstration is unsuccessful and has NOT been saved")# write dataset attributes (metadata)now = datetime.datetime.now()grp.attrs["date"] = "{}-{}-{}".format(now.month, now.day, now.year)grp.attrs["time"] = "{}:{}:{}".format(now.hour, now.minute, now.second)grp.attrs["repository_version"] = suite.__version__grp.attrs["env"] = env_namegrp.attrs["env_info"] = env_infof.close()if __name__ == "__main__":# Argumentsparser = argparse.ArgumentParser()parser.add_argument("--directory",type=str,default=os.path.join(suite.models.assets_root, "demonstrations_private"),)parser.add_argument("--environment", type=str, default="Lift")parser.add_argument("--robots", nargs="+", type=str, default="Panda", help="Which robot(s) to use in the env")parser.add_argument("--config", type=str, default="default", help="Specified environment configuration if necessary")parser.add_argument("--arm", type=str, default="right", help="Which arm to control (eg bimanual) 'right' or 'left'")parser.add_argument("--camera", type=str, default="agentview", help="Which camera to use for collecting demos")parser.add_argument("--controller",type=str,default=None,help="Choice of controller. Can be generic (eg. 'BASIC' or 'WHOLE_BODY_MINK_IK') or json file (see robosuite/controllers/config for examples)",)parser.add_argument("--device", type=str, default="keyboard")parser.add_argument("--pos-sensitivity", type=float, default=1.0, help="How much to scale position user inputs")parser.add_argument("--rot-sensitivity", type=float, default=1.0, help="How much to scale rotation user inputs")parser.add_argument("--renderer",type=str,default="mjviewer",help="Use Mujoco's builtin interactive viewer (mjviewer) or OpenCV viewer (mujoco)",)parser.add_argument("--max_fr",default=20,type=int,help="Sleep when simluation runs faster than specified frame rate; 20 fps is real time.",)args = parser.parse_args()# Get controller configcontroller_config = load_composite_controller_config(controller=args.controller,robot=args.robots[0],)if controller_config["type"] == "WHOLE_BODY_MINK_IK":# mink-speicific import. requires installing minkfrom robosuite.examples.third_party_controller.mink_controller import WholeBodyMinkIK# Create argument configurationconfig = {"env_name": args.environment,"robots": args.robots,"controller_configs": controller_config,}# Check if we're using a multi-armed environment and use env_configuration argument if soif "TwoArm" in args.environment:config["env_configuration"] = args.config# Create environmentenv = suite.make(**config,has_renderer=True,renderer=args.renderer,has_offscreen_renderer=False,render_camera=args.camera,ignore_done=True,use_camera_obs=False,reward_shaping=True,control_freq=20,)# Wrap this with visualization wrapperenv = VisualizationWrapper(env)# Grab reference to controller config and convert it to json-encoded stringenv_info = json.dumps(config)# wrap the environment with data collection wrappertmp_directory = "/tmp/{}".format(str(time.time()).replace(".", "_"))env = DataCollectionWrapper(env, tmp_directory)# initialize deviceif args.device == "keyboard":from robosuite.devices import Keyboarddevice = Keyboard(env=env, pos_sensitivity=args.pos_sensitivity, rot_sensitivity=args.rot_sensitivity)elif args.device == "spacemouse":from robosuite.devices import SpaceMousedevice = SpaceMouse(env=env, pos_sensitivity=args.pos_sensitivity, rot_sensitivity=args.rot_sensitivity)elif args.device == "xbox":from robosuite.devices.xbox import Xboxdevice = Xbox(env=env, pos_sensitivity=args.pos_sensitivity, rot_sensitivity=args.rot_sensitivity)elif args.device == "mjgui":assert args.renderer == "mjviewer", "Mocap is only supported with the mjviewer renderer"from robosuite.devices.mjgui import MJGUIdevice = MJGUI(env=env)else:raise Exception("Invalid device choice: choose either 'keyboard', 'spacemouse', 'xbox' or 'mjgui'.")# make a new timestamped directoryt1, t2 = str(time.time()).split(".")new_dir = os.path.join(args.directory, "{}_{}".format(t1, t2))os.makedirs(new_dir)# collect demonstrationswhile True:collect_human_trajectory(env, device, args.arm, args.max_fr)gather_demonstrations_as_hdf5(tmp_directory, new_dir, env_info)xbox.py
"""Driver class for Xbox controller.This class provides driver support for Xbox controllers using pygame.
Assumes a standard Xbox controller mapping."""import threading
import time
from collections import namedtupleimport numpy as np
from pynput.keyboard import Controller, Key, Listenerimport pygamefrom robosuite.utils.log_utils import ROBOSUITE_DEFAULT_LOGGERfrom robosuite.devices import Device
from robosuite.utils.transform_utils import rotation_matrixdef scale_to_control(x, min_v=-1.0, max_v=1.0):"""Normalize raw readings to target range. For pygame axes, already -1 to 1, so minimal scaling."""x = min(max(x, min_v), max_v)return xclass Xbox(Device):"""A minimalistic driver class for Xbox controller using pygame.Args:env (RobotEnv): The environment which contains the robot(s) to controlusing this device.pos_sensitivity (float): Magnitude of input position command scalingrot_sensitivity (float): Magnitude of scale input rotation commands scaling"""def __init__(self,env,pos_sensitivity=1.0,rot_sensitivity=1.0,):super().__init__(env)print("Opening Xbox device")self.pos_sensitivity = pos_sensitivityself.rot_sensitivity = rot_sensitivitypygame.init()pygame.joystick.init()if pygame.joystick.get_count() == 0:raise Exception("No joystick connected. Please connect an Xbox controller.")self.joystick = pygame.joystick.Joystick(0)self.joystick.init()print("Joystick: %s" % self.joystick.get_name())# 6-DOF variablesself.x, self.y, self.z = 0, 0, 0self.roll, self.pitch, self.yaw = 0, 0, 0self._display_controls()self.grasp_active = Falseself._control = [0.0, 0.0, 0.0, 0.0, 0.0, 0.0]self._reset_state = 0self.rotation = np.array([[-1.0, 0.0, 0.0], [0.0, 1.0, 0.0], [0.0, 0.0, -1.0]])self._enabled = False# Track previous button states for edge detectionself.prev_y = 0self.prev_x = 0# launch a new listener thread to listen to Xboxself.thread = threading.Thread(target=self.run)self.thread.daemon = Trueself.thread.start()# also add a keyboard for aux controlsself.listener = Listener(on_press=self.on_press, on_release=self.on_release)# start listeningself.listener.start()@staticmethoddef _display_controls():"""Method to pretty print controls."""def print_command(char, info):char += " " * (30 - len(char))print("{}\t{}".format(char, info))print("")print_command("Control", "Command")print_command("Y button", "reset simulation")print_command("X button (press)", "toggle gripper")print_command("Left stick (lateral)", "move arm horizontally in x-y plane")print_command("LT / RT triggers", "move arm vertically (RT up, LT down)")print_command("Right stick (lateral)", "rotate arm yaw / pitch")print_command("LB / RB buttons", "rotate arm roll")print_command("Control+C", "quit")print_command("b", "toggle arm/base mode (if applicable)")print_command("s", "switch active arm (if multi-armed robot)")print_command("=", "switch active robot (if multi-robot environment)")print("")def _reset_internal_state(self):"""Resets internal state of controller, except for the reset signal."""super()._reset_internal_state()self.rotation = np.array([[-1.0, 0.0, 0.0], [0.0, 1.0, 0.0], [0.0, 0.0, -1.0]])# Reset 6-DOF variablesself.x, self.y, self.z = 0, 0, 0self.roll, self.pitch, self.yaw = 0, 0, 0# Reset controlself._control = np.zeros(6)# Reset graspself.grasp_active = Falsedef start_control(self):"""Method that should be called externally before controller canstart receiving commands."""self._reset_internal_state()self._reset_state = 0self._enabled = Truedef get_controller_state(self):"""Grabs the current state of the controller.Returns:dict: A dictionary containing dpos, orn, unmodified orn, grasp, and reset"""dpos = self.control[:3] * 0.005 * self.pos_sensitivityroll, pitch, yaw = self.control[3:] * 0.005 * self.rot_sensitivity# convert RPY to an absolute orientationdrot1 = rotation_matrix(angle=-pitch, direction=[1.0, 0, 0], point=None)[:3, :3]drot2 = rotation_matrix(angle=roll, direction=[0, 1.0, 0], point=None)[:3, :3]drot3 = rotation_matrix(angle=yaw, direction=[0, 0, 1.0], point=None)[:3, :3]self.rotation = self.rotation.dot(drot1.dot(drot2.dot(drot3)))return dict(dpos=dpos,rotation=self.rotation,raw_drotation=np.array([roll, pitch, yaw]),grasp=self.control_gripper,reset=self._reset_state,base_mode=int(self.base_mode),)def run(self):"""Listener method that keeps pulling new messages."""while True:time.sleep(0.01)if self._enabled:pygame.event.pump()self.x = scale_to_control(self.joystick.get_axis(1))self.y = scale_to_control(self.joystick.get_axis(0))lt = self.joystick.get_axis(2)rt = self.joystick.get_axis(5)self.z = scale_to_control(rt - lt)self.roll = self.joystick.get_button(5) - self.joystick.get_button(4) # RB - LBself.pitch = scale_to_control(-self.joystick.get_axis(4))self.yaw = scale_to_control(self.joystick.get_axis(3))self._control = [self.x,self.y,self.z,self.roll,self.pitch,self.yaw,]# Gripper togglecurr_x = self.joystick.get_button(2) # X buttonif curr_x == 1 and self.prev_x == 0:self.grasp_active = not self.grasp_activeself.prev_x = curr_x# Reset on Y press (edge detection)curr_y = self.joystick.get_button(3)if curr_y == 1 and self.prev_y == 0:self._reset_state = 1self._enabled = Falseself._reset_internal_state()self.prev_y = curr_y@propertydef control(self):"""Grabs current pose of controllerReturns:np.array: 6-DoF control value"""return np.array(self._control)@propertydef control_gripper(self):"""Maps internal states into gripper commands.Returns:float: Whether we're using single click and hold or not"""if self.grasp_active:return 1.0return 0def on_press(self, key):"""Key handler for key presses.Args:key (str): key that was pressed"""passdef on_release(self, key):"""Key handler for key releases.Args:key (str): key that was pressed"""try:# controls for mobile base (only applicable if mobile base present)if key.char == "b":self.base_modes[self.active_robot] = not self.base_modes[self.active_robot] # toggle mobile baseelif key.char == "s":self.active_arm_index = (self.active_arm_index + 1) % len(self.all_robot_arms[self.active_robot])elif key.char == "=":self.active_robot = (self.active_robot + 1) % self.num_robotsexcept AttributeError as e:passdef _postprocess_device_outputs(self, dpos, drotation):drotation = drotation * 50dpos = dpos * 125dpos = np.clip(dpos, -1, 1)drotation = np.clip(drotation, -1, 1)return dpos, drotationif __name__ == "__main__":xbox = Xbox()for i in range(100):print(xbox.control, xbox.control_gripper)time.sleep(0.02)使用说明
- 安装依赖:确保安装了pygame(
pip install pygame),以及Robosuite的其他依赖。 - 运行脚本:使用命令如
python collect_human_demonstrations.py --device xbox --environment Lift --robots Panda启动采集。 - 控制映射:
- 左摇杆:x-y平面移动(前后左右)。
- LT/RT:z轴上下。
- 右摇杆:偏航和俯仰。
- LB/RB:滚转。
- X按钮:切换抓取状态。
- Y按钮:重置。
参考资料:Robosuite GitHub仓库(https://github.com/ARISE-Initiative/robosuite)。