仿快递网站源码一个网站做多少关键词
MEMS 陀螺仪因其体积小、成本低和易于集成等优点,在无人机、汽车导航和消费电子等领域得到了广泛应用。然而,MEMS 陀螺仪的输出信号中普遍存在随机误差和噪声,严重影响了惯性导航系统的精度和稳定性。为了对陀螺仪的噪声特性进行定量分析,本文基于 Allan 方差方法,对 MEMS 陀螺仪的随机误差进行了建模与参数识别。通过对采集的陀螺仪数据进行 Allan 方差计算,获得了角度随机游走(ARW)、零偏不稳定性(Bias Instability)等关键噪声参数。在此基础上,利用 MATLAB 编程实现了 Allan 方差的计算、拟合与曲线绘制,验证了所提方法的有效性。实验结果表明,该方法能够有效分离和识别不同类型的噪声特性,为 MEMS 陀螺仪在惯性导航和定位中的应用提供了参考。
作者:张家梁(改进)
引言
随着无人驾驶、智能手机、可穿戴设备以及无人机等领域的快速发展,低成本、高可靠性的惯性传感器需求日益增长。MEMS(Micro-Electro-Mechanical Systems)陀螺仪作为其中的核心器件,因其结构紧凑、功耗低和易于大规模生产的特点,在众多应用中得到了广泛使用。然而,与光纤陀螺仪和环形激光陀螺仪相比,MEMS 陀螺仪的测量精度和稳定性仍存在较大差距。其输出信号中包含的噪声和随机误差不仅限制了其在高精度导航领域的应用,还影响了姿态解算与定位结果的可靠性。
为了深入理解 MEMS 陀螺仪的噪声特性,研究人员提出了多种分析方法,其中 Allan 方差(Allan Variance)因其能够区分不同类型的随机误差源而被广泛采用。该方法通过对陀螺仪输出角速度数据的时间序列进行统计处理,可以有效分离出角度随机游走(Angle Random Walk)、零偏不稳定性(Bias Instability)、角速率游走(Rate Random Walk)等误差分量,从而为建模和补偿提供依据。
本文针对 MEMS 陀螺仪的随机误差分析,采用 Allan 方差方法对其噪声特性进行建模与参数识别,并利用 MATLAB 平台实现了相应的算法和图形化展示。研究结果不仅为陀螺仪误差建模提供了实验基础,也为后续在惯性导航系统中的误差补偿与性能优化提供了参考价值。
系统架构
1.系统概述
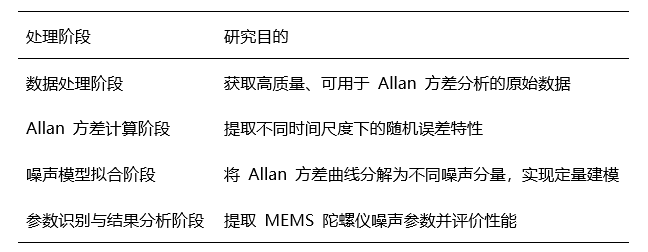
本系统旨在实现对 MEMS 陀螺仪随机误差特性的分析与建模,核心方法为 Allan 方差分析。系统整体基于 MATLAB 平台构建,涵盖数据读取与预处理、Allan 方差计算、噪声模型拟合、参数识别以及结果可视化等功能模块。通过对陀螺仪采集的角速度数据进行处理,系统能够自动完成从原始数据到 Allan 方差曲线的生成,再到噪声参数(量化噪声、角度随机游走、零偏不稳定性、角速率游走和速率斜坡)的提取与输出。该系统结构清晰、功能完整,既适用于对 MEMS 陀螺仪性能的实验研究,也可为惯性导航系统的误差建模与补偿提供支持。
2.系统流程图

研究方法
本研究基于 Allan 方差方法,对 MEMS 陀螺仪输出数据进行预处理、方差计算、噪声模型拟合与参数识别,从而实现其随机误差特性分析与建模。
实验结果
实验结果表明,X 轴噪声水平整体最小、性能最佳,Z 轴在零偏不稳定性和速率游走方面数值最大、稳定性最差,拟合曲线与 Allan 方差实测曲线高度一致。
实验结果
运行gyro_data.m
图1:MEMS 陀螺仪 Allan 方差曲线及噪声模型拟合结果
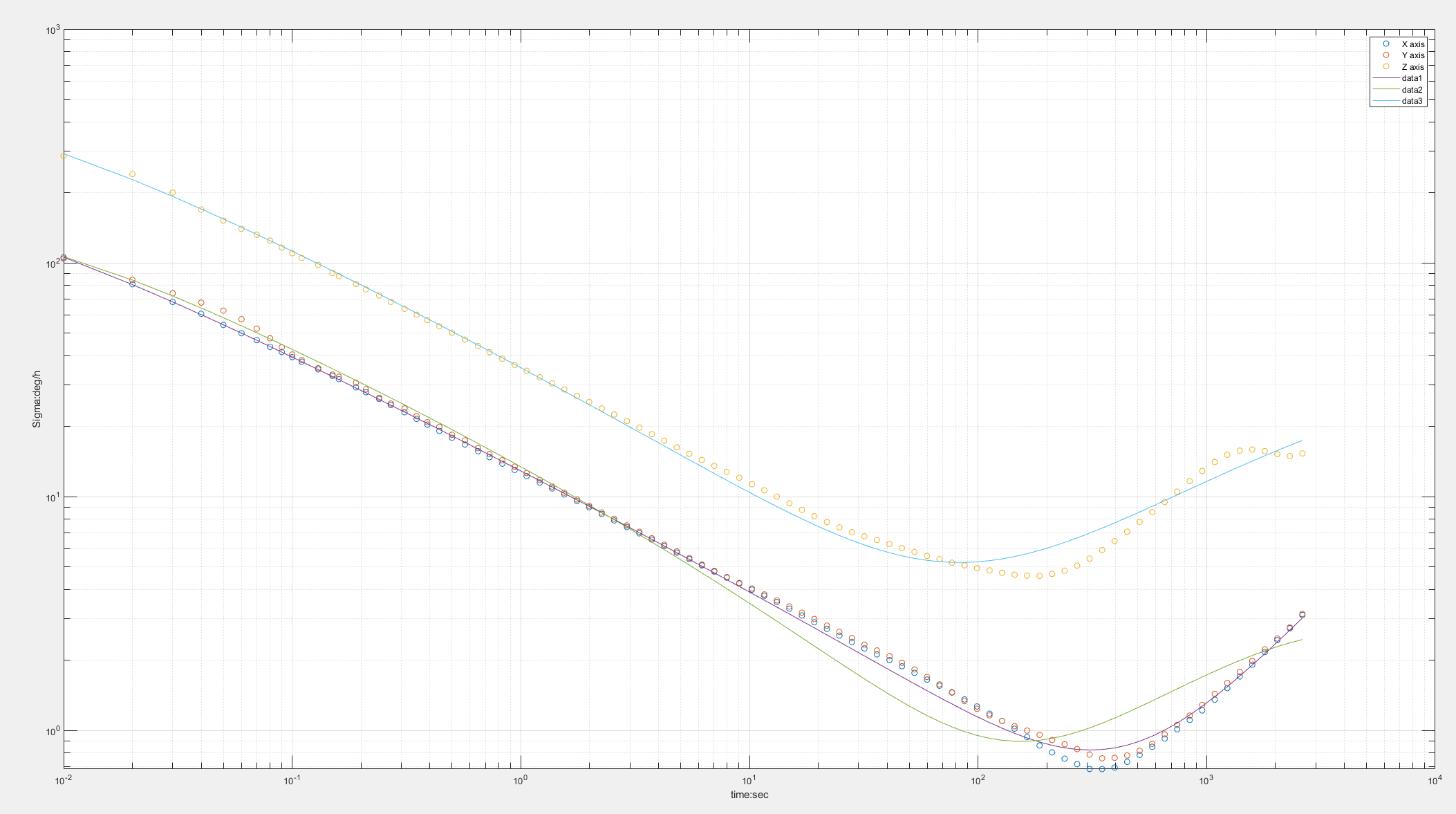
分析:图中 Allan 方差实测曲线与拟合曲线高度吻合,清晰分辨出角度随机游走、零偏不稳定性等噪声特性,其中 X 轴性能最佳而 Z 轴稳定性最差。
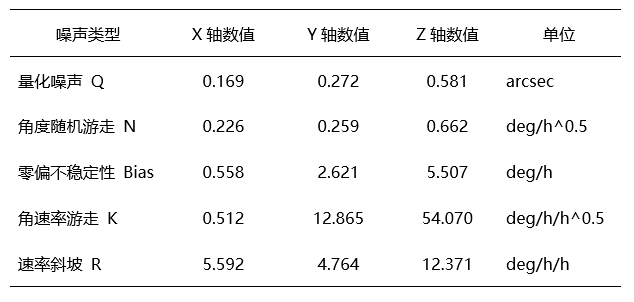
图2:MEMS 陀螺仪 Allan 方差噪声参数识别结果

实验结果表明,X 轴噪声水平最低、性能最佳,Z 轴随机误差最严重,而 Allan 方差分析能够有效区分各类噪声特性,为 MEMS 陀螺仪性能评估与建模提供依据。
系统实现
本系统完全基于MATLAB平台开发,主要集成以下脚本与模块: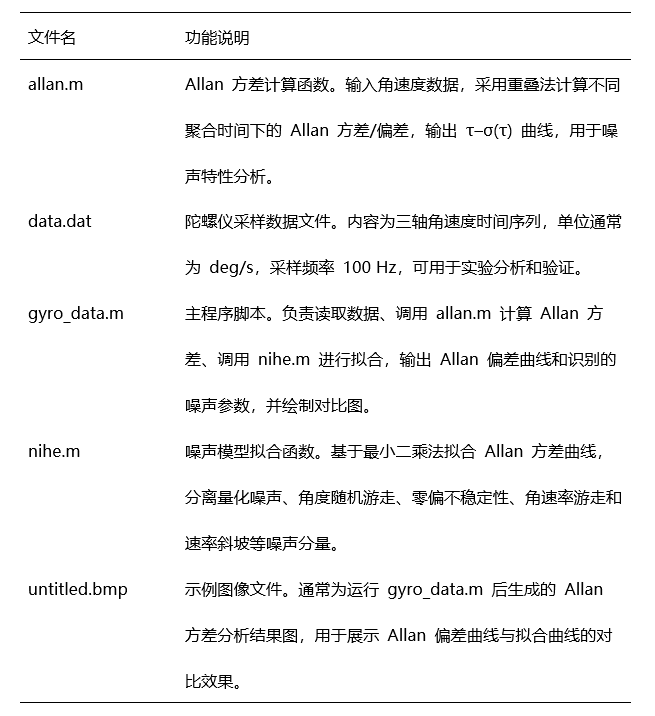
研究结论
本文基于 Allan 方差方法对 MEMS 陀螺仪的随机误差特性进行了系统分析与建模。通过 MATLAB 平台实现了数据预处理、Allan 方差计算、噪声模型拟合及参数识别等步骤,获得了量化噪声、角度随机游走、零偏不稳定性、角速率游走和速率斜坡等关键指标。实验结果表明,拟合曲线与实测 Allan 方差曲线高度一致,验证了所提方法的有效性;其中 X 轴噪声水平整体最小,性能最佳,而 Z 轴在零偏不稳定性和速率游走方面表现最差,稳定性较低。该研究为 MEMS 陀螺仪的误差建模和性能评估提供了可行方法,也为其在惯性导航与定位中的应用奠定了基础。
实验环境
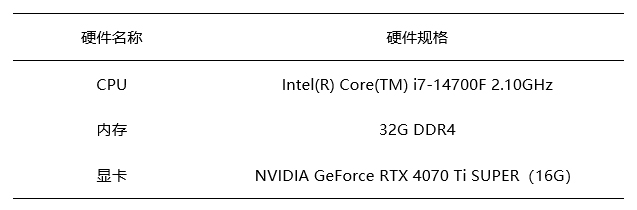
硬件配置如表:实验所用硬件平台为惠普(HP)暗影精灵10台式机整机,运行 Windows 11 64 位操作系统,作为模型训练与测试的主要计算平台,能够良好支持Matlab的开发需求。
官方声明
实验环境真实性与合规性声明:
本研究所使用的硬件与软件环境均为真实可复现的配置,未采用虚构实验平台或虚拟模拟环境。实验平台为作者自主购买的惠普(HP)暗影精灵 10 台式整机,具体硬件参数详见表。软件环境涵盖操作系统、开发工具、深度学习框架、MATLAB工具等,具体配置详见表,所有软件组件均来源于官方渠道或开源社区,并按照其许可协议合法安装与使用。
研究过程中严格遵循学术诚信和实验可复现性要求,确保所有实验数据、训练过程与结果均可在相同环境下被重复验证,符合科研规范与工程实践标准。
版权声明:
本算法改进中涉及的文字、图片、表格、程序代码及实验数据,除特别注明外,均由7zcode.张家梁独立完成。未经7zcode官方书面许可,任何单位或个人不得擅自复制、传播、修改、转发或用于商业用途。如需引用本研究内容,请遵循学术规范,注明出处,并不得歪曲或误用相关结论。
本研究所使用的第三方开源工具、框架及数据资源均已在文中明确标注,并严格遵守其相应的开源许可协议。使用过程中无违反知识产权相关法规,且全部用于非商业性学术研究用途。