Integrated Sensing and Communications in Clutter Environment
摘要——在本文中,我们提出了一个实用的通信感知一体化 (ISAC) 框架,用于在确保用户通信质量的同时,从杂波环境中感知动态目标。为了同时实现通信功能和感知功能,我们设计了多个能与用户通信的通信波束,以及一个能旋转并扫描整个空间的感知波束。为了最小化感知波束对现有通信系统的干扰,我们将服务区域划分为感知波束感知 (S4S) 扇区和通信波束感知 (C4S) 扇区,并为每种类型的扇区提供了波束成形设计和功率分配优化策略。
与大多数忽略静态环境杂波对目标感知干扰的现有 ISAC 研究不同,我们构建了一个包含静态环境和动态目标的混合感知信道模型。当基站接收到回波信号时,它首先滤除来自静态环境杂波的干扰,并提取出有效的动态目标回波。然后,我们设计了一个完整且实用的动态目标感知方案,用于检测动态目标的存在并估计其角度、距离和速度。
具体而言,动态目标的检测和角度估计是通过角度-多普勒谱估计 (ADSE) 和多子载波联合检测 (MSJD) 实现的,而距离和速度估计则是通过扩展子空间算法实现的。仿真结果证明了所提方案的有效性,及其相对于忽略环境杂波的现有方法的优越性。
索引词——通信感知一体化,动态目标感知,静态环境感知,杂波抑制,功率分配。
文章目录
- I. Introduction
I. Introduction
通信感知一体化 (ISAC) 近来在无线通信领域引起了重大的研究兴趣 [1], [2], [3]。其思想是利用通信信号来感知真实物理世界中的各种信息,如建筑构成、人类活动等,同时确保用户的通信质量。由于 ISAC 允许感知系统和通信系统共享相同的硬件和频谱资源,并能服务于车联网、数字孪生等多种智能应用,它已被视为第六代 (6G) 通信的关键技术之一 [4], [5]。
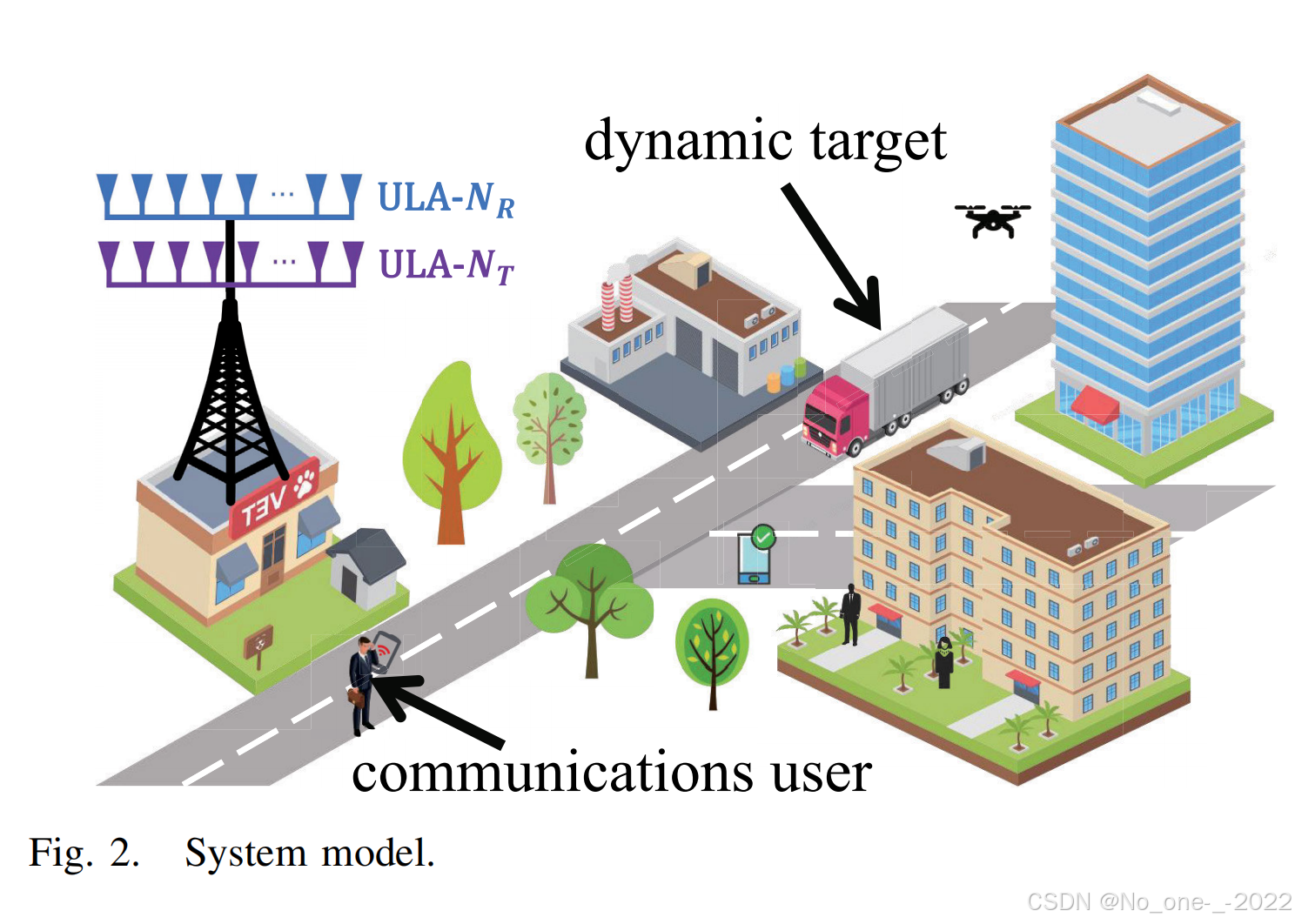
感知的最终功能是构建从真实物理世界到数字孪生世界的映射关系,其中前者包括静态环境 (如道路和建筑) 和动态目标 (如行人和车辆)。因此,ISAC 系统中的感知任务包括静态环境感知 (static environment sensing,SES) 和动态目标感知 (dynamic targets sensing,DTS),如图 1 左半部分所示。静态环境的变化通常是缓慢的,因此可以应用各种环境重建技术来感知静态环境 [6], [7], [8]。然而,由于动态目标的变化是迅速的,有必要实时检测动态目标的存在并更新其参数估计。通常,可以将 DTS 问题分为两类:
- 感知协作的通信用户,例如移动电话;
- 以及 感知与基站 (BS) 没有通信的非协作动态目标,例如移动物体或未处于通信状态的移动用户。
此外,随着对感知需求的日益增长,研究人员致力于使 ISAC 系统具备超高的感知精度。令人鼓舞的是(Encouragingly),在毫米波 (mmWave) 或太赫兹 (Terahertz) 频段利用大规模多输入多输出 (MIMO) 阵列进行感知,凭借其高方向性和高时间分辨率,可以实现更高的精度 [9], [10]。因此,基于大规模 MIMO 阵列的 ISAC 系统已被广泛研究。在感知协作用户方面,可以通过处理通信信号并提取信道参数,如到达时间 (TOA)、离开角 (AOD) 等,来估计用户的位置 [11], [12], [13], [14]。另一方面,在 ISAC 框架下,对非协作目标的感知也已得到研究。
- 例如,Gao 等人提出了一种依赖于 MIMO 阵列的 ISAC 系统,该系统应用压缩采样来促进目标感知及其他ISAC 处理 [15]。
- Wang 等人提出了一个同时传输和反射表面使能的 ISAC 框架,其中利用二维最大似然估计来估计目标角度 [16]。
- Li 等人提出了一种两阶段算法,利用正交频分复用 (OFDM) 信号来估计多个目标的位置和速度 [17]。
- Kumari 等人提出了一种用于车联网的 ISAC 系统,实现了车对车通信和全双工雷达感知 [18]。
- Chen 等人提出了一种基于多重信号分类的 ISAC 系统,该系统在动态目标感知方面可以获得很高的估计精度 [19]。
然而,所有这些工作都忽略了静态环境杂波对动态目标感知的干扰,这与目标总是被静态环境干扰淹没且难以分离的真实场景不符,从而限制了在真实场景和实际 ISAC 系统中的感知性能。
同时(Meanwhile),对于基于 MIMO 阵列的 ISAC 系统,人们需要设计多波束的波束成形来同时实现通信功能和感知功能 [20], [21], [22], [23]。
- 例如,Barneto 等人构建了一个多用户 ISAC 系统中的波束成形设计问题,旨在最大化感知方向功率的同时在通信方向上保持一定的功率 [24]。
- Luo 等人提出了一个结合了基站和可重构智能表面 (RIS) 的 ISAC 系统,并联合优化了波束成形矩阵,以在满足感知波束约束的同时最大化通信用户的可实现和速率 [25]。
- Wang 等人研究了多用户 ISAC 系统的部分连接波束成形设计,旨在最小化到达角 (DOA) 估计的克拉美-罗界,同时确保通信性能 [26]。
然而,所有这些工作都需要复杂的优化过程,并且难以在实际系统中实施。
基于以上分析,现有的关于 ISAC 系统的研究在波束成形设计上需要复杂的优化方案,并且在回波信号处理中忽略了环境杂波的严重干扰,这使得它们难以在实际的基站系统中部署和应用。在本文中,我们提出了一个实用的 ISAC 框架,用于在确保用户通信质量的同时,从杂波环境中感知动态目标。本文的贡献总结如下。
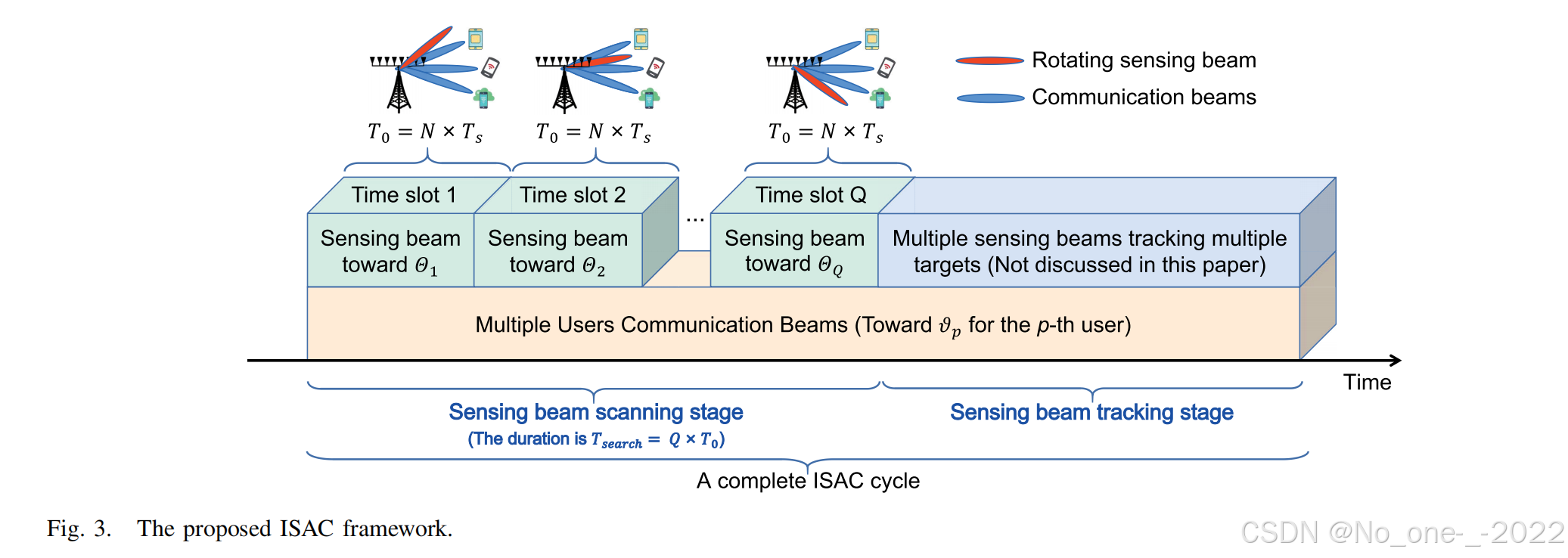
- 我们提出了一个实用的 ISAC 框架来同时实现通信和感知,其中我们设计了多个能与用户通信的通信波束,同时指定一个能旋转并扫描整个空间的感知波束。整个过程总结在图 1 的右半部分。
- 基站应在每个时隙优化发射波束成形以传输信号。具体来说,为了最小化感知波束对现有通信系统的干扰,我们将基站的服务区域划分为感知波束感知 (S4S) 扇区和通信波束感知 (C4S) 扇区。为避免在实际系统中难以实施的复杂优化,我们将预编码优化问题转化为通信和感知波束的功率分配问题,并为每种类型的扇区提供了有效的功率分配策略。
- 我们为实用的 ISAC 系统构建了杂波环境模型,此时基站接收的回波既包括由静态环境引起的回波,也包括由动态目标引起的回波。为了解决静态环境杂波对动态目标感知的负面干扰,我们首先滤除来自静态环境杂波的干扰,并提取出有效的动态目标回波。然后,提出了角度-多普勒谱估计 (angle-Doppler spectrum estimation,ADSE) 和多子载波联合检测 (joint detection over multiple subcarriers,MSJD) 来检测动态目标并估计其角度。扩展子空间算法被用来估计动态目标的距离和速度。此外,为了获得每个目标的多个参数,我们设计了一种角度-距离-速度匹配方法来实现参数匹配。
- 我们提供了多种仿真来证明所提方案的有效性,及其相对于忽略环境杂波的现有方法的优越性。