6DOF-Euler Angles
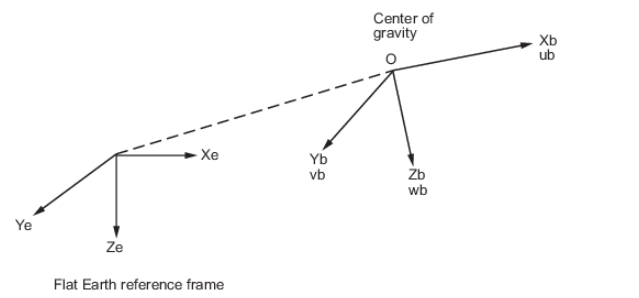
用于实现六自由度运动方程的欧拉角表示,如UAV、飞艇等物体,同时考虑了物体固定坐标系(Xb、Yb、Zb)绕平面地球参考系(Xe、Ye、Ze)旋转,也就是将机体系转换到惯性系下。在基础模块的下的质量是不可变的,且施加力作用在物体的重心处。
输入参数
1.Fxyz-施加的力三元向量
2.Mxyz-三元力矩矢量
输出参数
1.Ve-惯性系下的三元速度向量
2.Xe-惯性系下的三元位置向量
3.Euler-以rad为单位的欧拉旋转角
4.DCMbe-将惯性系转换为机体系的坐标变换
5.Vb-机体系下的三元速度向量
6.Wb-rad/s机体轴的角速度向量
7.m-机体质量
8.I-惯性张量矩阵
模块参数
1.Units-输入和输出单位
2.Mass type-质量类型固定
3.惯性轴中的初始位置
4.机体轴中的初始速度
5.初始欧拉角方向
6.初始机体旋转速率
7.初始质量
8.空质量
9.全质量
10.惯性
11.空惯性
12.全惯性
13.质量流相对速度
算法:
物体固定坐标系的原点是物体中心,假设物体为刚性,消除了考虑作用在各个质量元素之间的力的需要
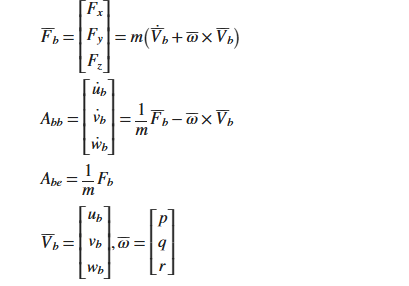
主体固定坐标系的平移运动,对机体系施加力[Fx,Fy ,Fz],假设质量为恒定值m
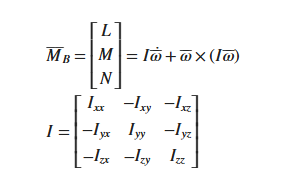
在机体系固定下的旋转动力学,其中施加的力矩为[L,M,N].惯性张量I是关于原点O的
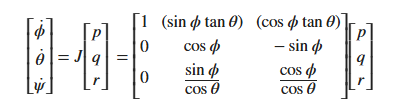
物体机体坐标系的速度矢量[p q r]和欧拉角变化率I

可以推导出欧拉角加速度与角速度的关系