越野组(遇到的问题)
装车
- 固定顺序 比如 把黑板放上去 陀螺仪铜柱没法按了(能把)
- 线序 画板(改不了了)
- 底部用螺丝上面铜柱(不架高的地方)
- 他这把法兰盘放前面了
驱动
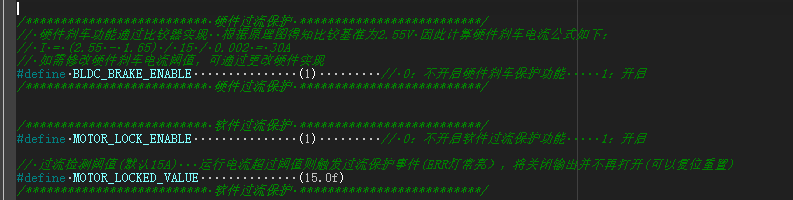
- 没打开驱动 开关 在试换点时 , 驱动红灯亮了(电压)
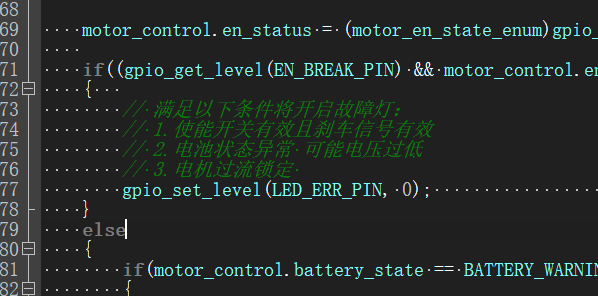
- 有刹车信号?
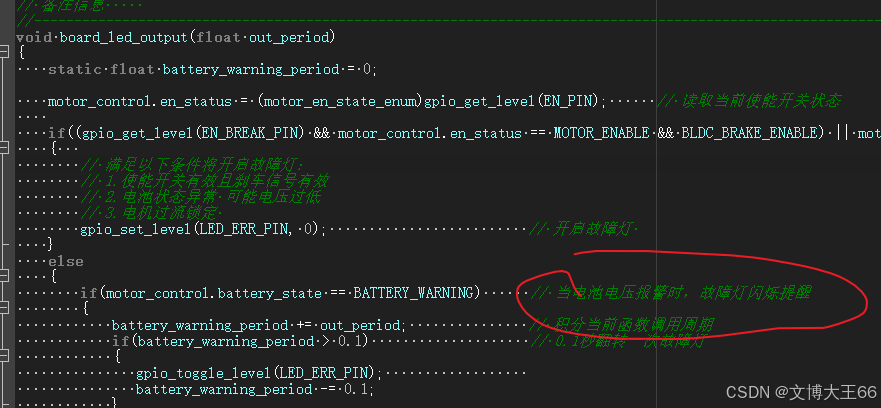
- 应该电压不够? 范围好小
充电以后 不再闪烁- 解决了 adc测的小不少 到3.9的边了 导致红灯闪烁(会限制输出好像)
- printf 时 插拔 关闭主板供电 都对打印有帮助
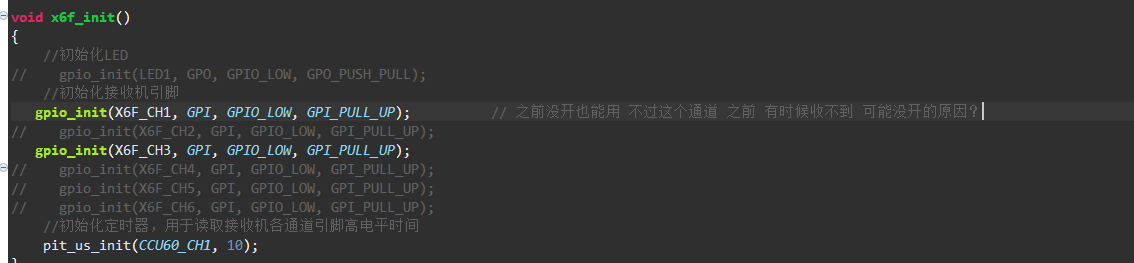
key没开init 居然能用 (有可能是)
-
陀螺仪 积分看看 丢值 数据类型?(没问题的)
-
舵机那 居然有那种草坪的塑料
-
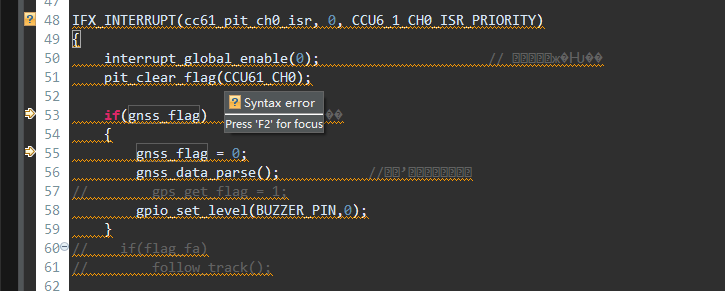
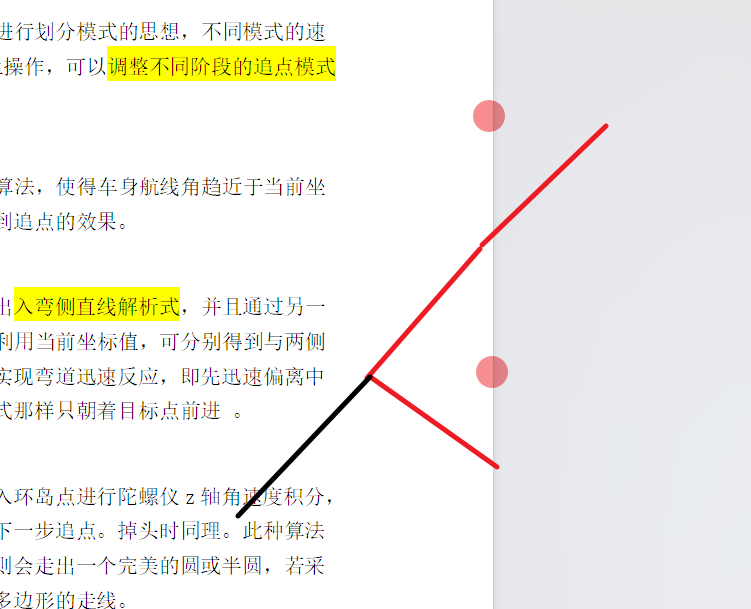
之前 好像把循迹 放中断里会卡死 逐飞说 把解析放主函数里更快
-
左右打死并没做那么绝
-
gps 不如前面那个 漂且 数量少 难道好久没用(数量少 可能是长期没用? 实时距离都是跳的)
-
400 开启 听着转 车没动 怀疑齿轮开了 但推后轮前轮动 还得拆 c (确实里面开了 把那个座暂时没安装) -
再去看看逐飞浅析里面陀螺仪的处理
-
这个四元数 963这不会哪些参数不对吧
-
感觉调了 电池矫正系数后 跑的没原先猛了 刹车也慢了 (充电试试 还是软绵)(3000跑的很猛 )
-
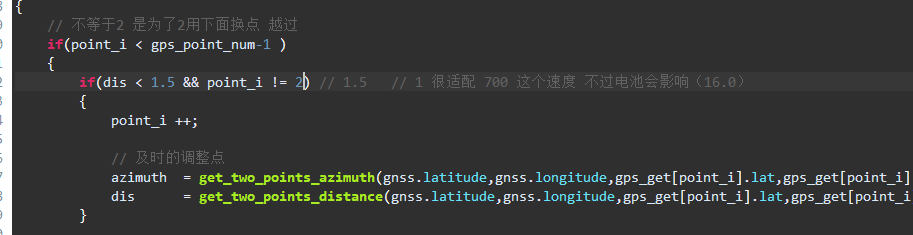
为啥距离改了0.5 变化这么大 (偏差矫正确实起作用了 发车时直接跳到点1了)
-
1.5 跑的也偏 不过看起来好 但转弯时右转了 也就是转大角了 难道是GPS漂了 导致本来是 她算的小角 但又变成大角了(偶尔出现 可能和GPS漂有关系)
-
解析放主函数里试试
-
科三坡道可能是个大问题
-
换点的距离 会不会越小就会看起来偏差越大
路径修正
- gps用结构体存吧
- 结构体声明最好放在前面
- 不清屏 下次显示用不到的地方应该还在
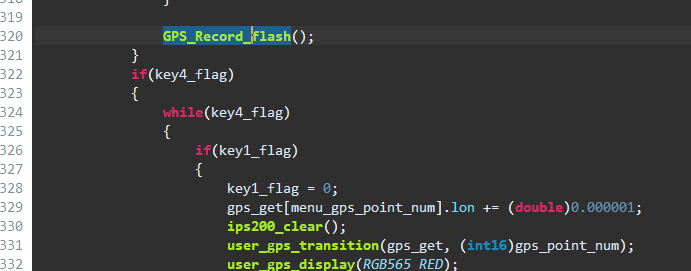
- 简单 不过按键修正呢 孩子(有的)
- 选点 i 选经纬度 选 挡位(可能不需要不会偏太多) 选加减
菜单
- 需要加额外按键 (按键够了就不写了)
任意方向发车
- 应该没事
- 发车两三米 再算真的行吗
陀螺仪
- 为啥去了静差 还要低通滤一下
Flash
- 没double 可把double64位 拆成两个32位的float 但存在精度丢失
- AI写的拆分成两个uint还行 orrn里 好几种看的头晕
- 后续可以打印字节出来验证
- double是怎么存小数的
赛道解决
第20届 极速越野组 演示车模 运行演示

- 逐飞这大概是1m长 两条跑道 1.22m

- 用了多种方法
- 龙邱这就是打滑过的
- 用GPS踩点的话 可能有说法 比如最后一个 点 在桶 偏右前方可能好

- 这涉及调点了
-
画圆圈了还
龙邱演示 -
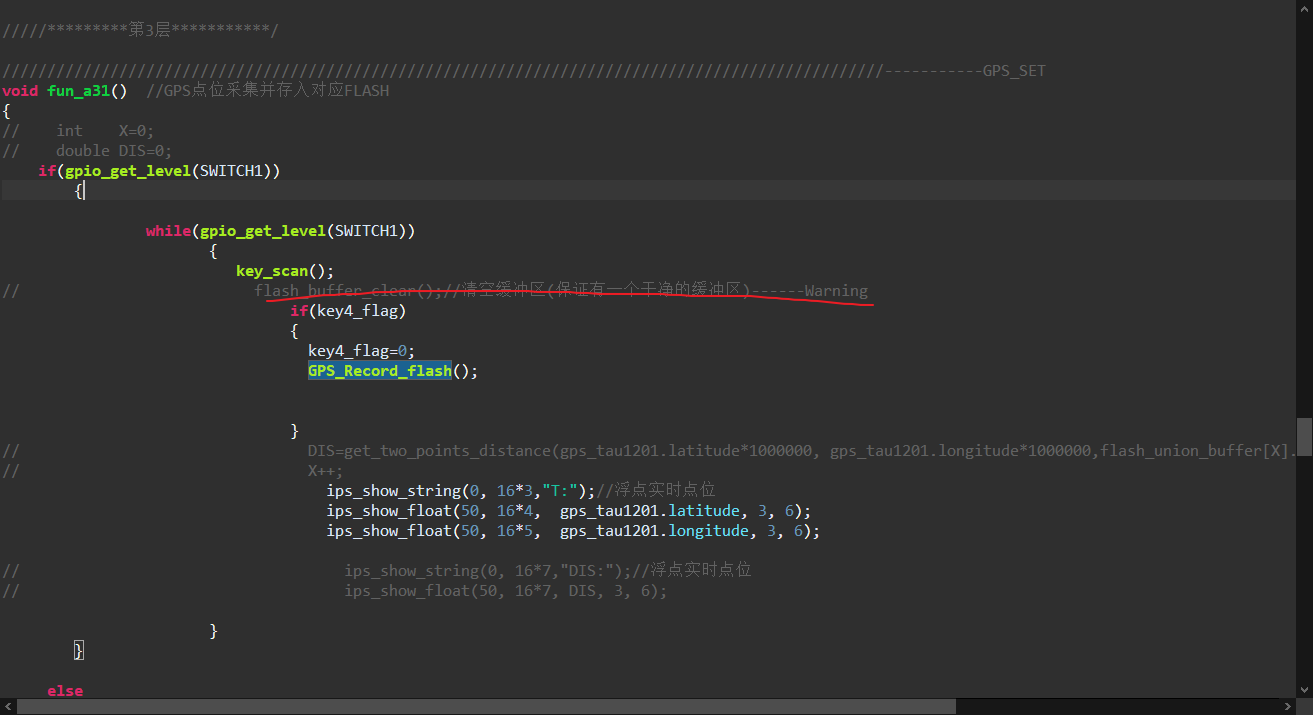
我发现我这种存点 好像GPS只能放在中断 因为存点是卡死在这
-
之前用flash跑 差很多原因是 : flash缓冲数组 比如[0] 不能既用uint 又用int 导致第一个存点维度不对
-
采的和跑的路径 有0.5的误差感觉 但连续两次跑路径高度重合 但隔了一会再跑 路径出现一点偏差
-
我好像找到IMU那为啥还要低通滤波一下了
-
gps的值 需要特殊处理吗
-
上次 遥控通道一 会掉
-
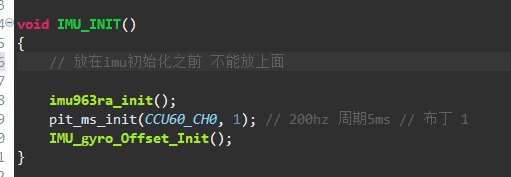
开定时中断不能放imu初始化前 会卡死
-
按 消静差的思想去 划整个路径为二 (好像不行 但摄像头可以帮助gps去纠正)
科四
-
需要 存下所有点 灵活切换程序
-
看一下 录播 逐飞的
-
硅麦咋采集的 通过ad

-
看历程 看orrn 和 去年代码

- 对应链接里 都是V1.2
-
asr语音识别
-
nm的 为啥adc采集例程 接3v3 gnd都没变化 电压倒能测 难道需要接运放?(真sb啊 下面那个能用 上面两不能用?)(因为不是一个)
-
为啥 他的硅麦 运放那里既有 那种方的 又有转接板上的(绿色方的 不是硅麦用的)
-
再去看看书
-
硅麦模块不用自制吧
1. 摄像头链接
- 那我服了

- 100hz 好像不一定 说明书里面提过50hz?
1. 17届
- 17届
2. 英飞凌“极速四轮组”浅析
英飞凌“极速四轮组”浅析

- 提到 内倾 内八 以及 摄像头安装到主板中间 会损失近端数据

- 提到 重心 坡道 电池 加减速 机械调教
3. 智能车制作
智能车制作
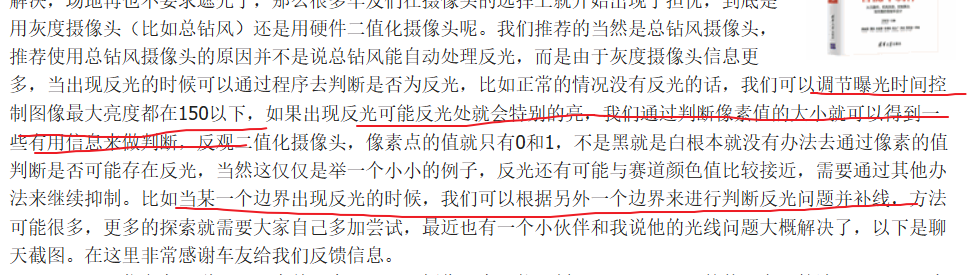
- 曝光时间 可以 改 图像最大亮度?
- 反光的地方 比 最大亮度高
- 通过另一个 边界 来补线
-
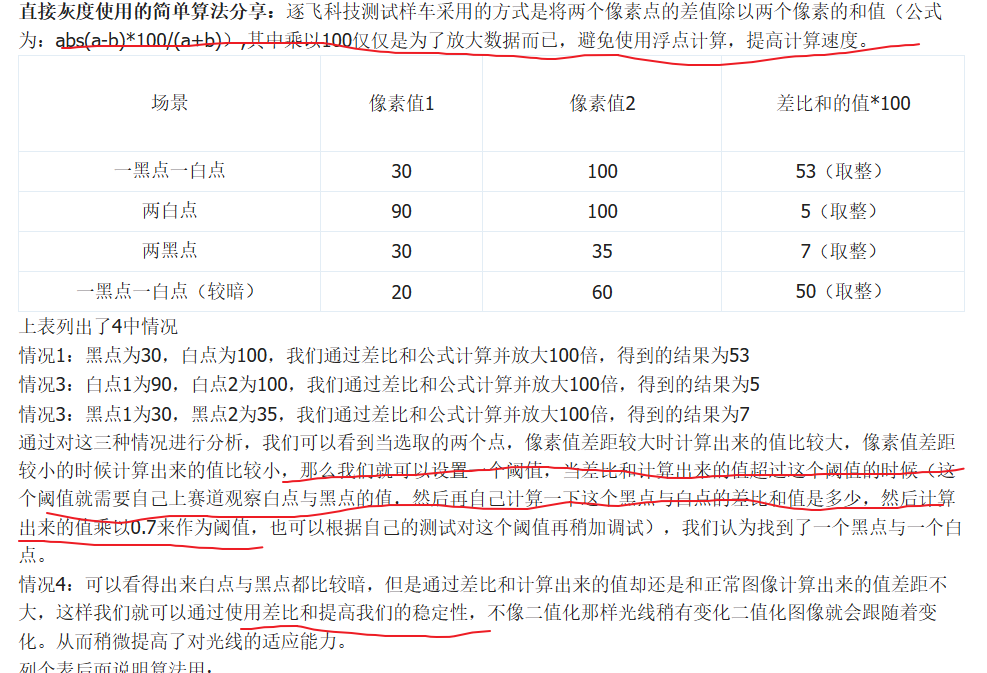
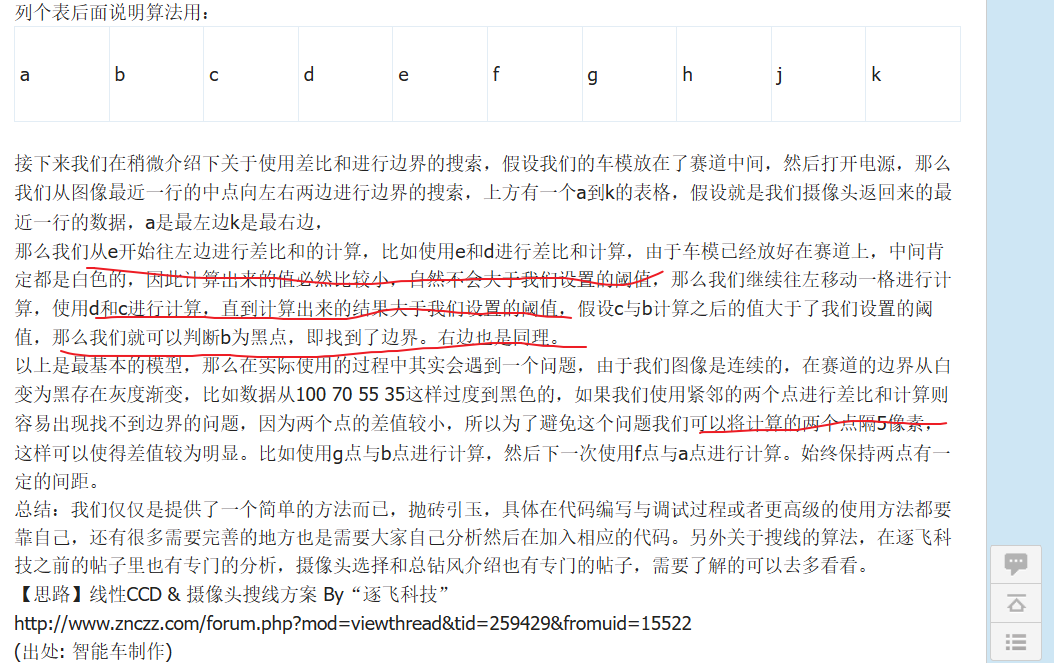
差比和 暗处 算出来的也差不多
-
*100 可以换成 左移 避免浮点运算
-
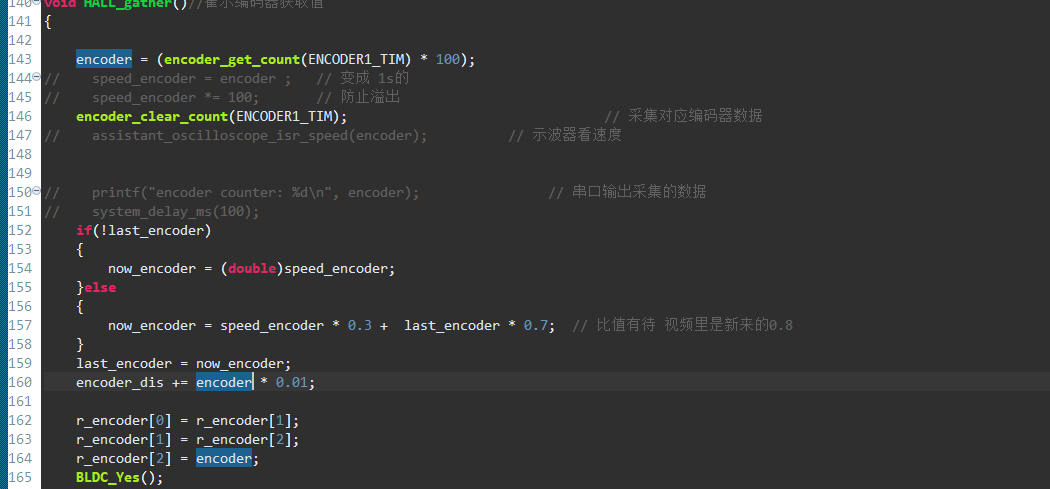
阈值 为啥*0.7
-
演示 差比和 怎么用
-
通过 隔更多像素 来 解决连续的问题
-
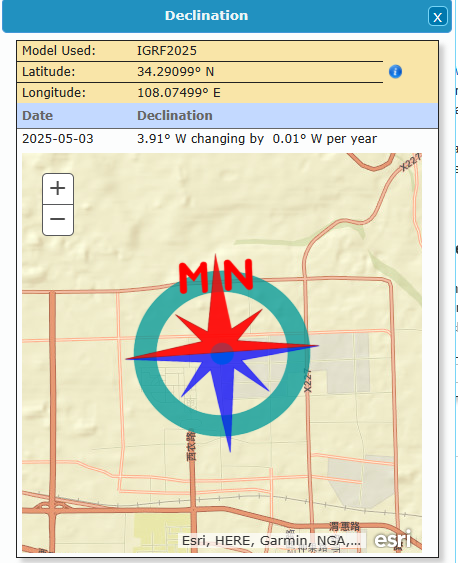
可能需要减去磁偏角
-
手机指南针感觉很不靠谱
-
留wifi串口的地方不是spi的

-
现在 同步是15.8 用了spi的
-
也可用33.7 但会改很多
-
用串口0 注释了 才能显示
-
换了驱动 依旧少一行 难道是灯板坏了?
- 这1ms 不开IMU GPS没数据?(这是四元数)
- LED 里用了他那个按键 (长按)
科二
- 到时候计时咋计(Lora?)
- 给gps定时器 改小点
- 正北发车的磁偏角
- GPS咋调
-
原来地上的线 对的是真北
-
跑起来 好像真的可以去矫正IMU
-
舵机闭环很重要吗?
-
最后一个点 偏差更大(踩点时的误差)消静差时,是以第一个点,所以 看起来最后一个点偏了 如果不消除 及时发车,那就会越起点越偏,这实际是 时间越长偏差越大,像一个调皮的蛇
-
点靠近锥桶点 (可能需要滤波)
-
把起始点变一下
-
目前速度越快 越容易 一直绕 ,可能和舵机刚开始打角有关系,调高频率?镜头涉及过
经纬度查磁偏角 -
语音识别 有时候说了没反应,有时候倒还可以
-
演示视频里是一直按着按键(估计是因为 屏幕没法像printf那样连续输出)
-
一开就不行 c啊 真服了
-
哎 用镜头板子 核心板响了几下
-
然后发现 插下载器 灯就不亮了 之前也没注意(换了个核心板依旧这样)(难道真是之前没注意到?)(之前用的串口0) 复位 或者下载都会亮
-
把wifi串口 换到核1可以了
-
但有时识别不到
-
可能和噪音 给云端了有关系
-
去简单看看adc吧 逐飞 和 文章吧
-
不管了 就这样 整体看刚开始的话可以(或许开机放一会?不按按钮等一下?)(考虑 没shi别到最后一句话)
-
主板上还能加GND吗(飞线得了 反正好接)
-
灯光和灰排线依旧 冲突点
-
后面动作 考虑到线 和 是否用编码器 后面写吧
-
看来加了屏幕 识别会有问题
-
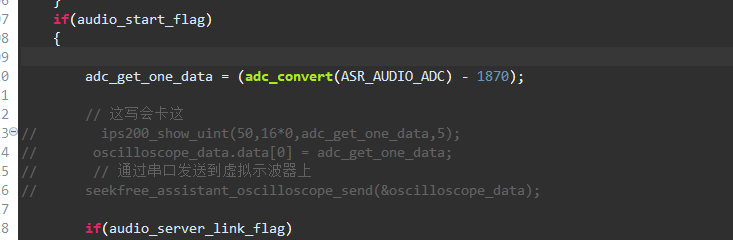
而且 ips 显示 和 示波器 都不能放在 中断里?(示波器可以 ips不行)(双核真好用)
-
响应时间
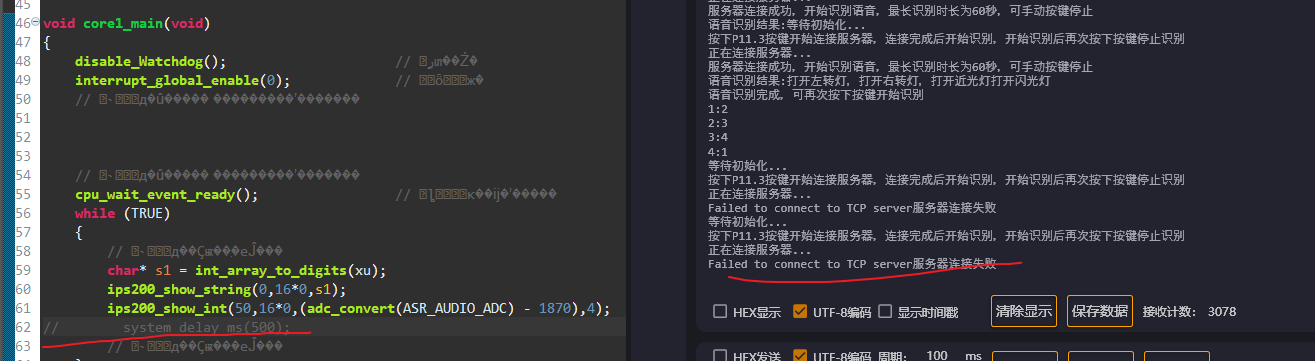
-
一核 不加延时 这就会连接不上(应该是那个显示的问题 s1 NULL时不能一直快速显示)
-
开久了 adc数值卡死了
-
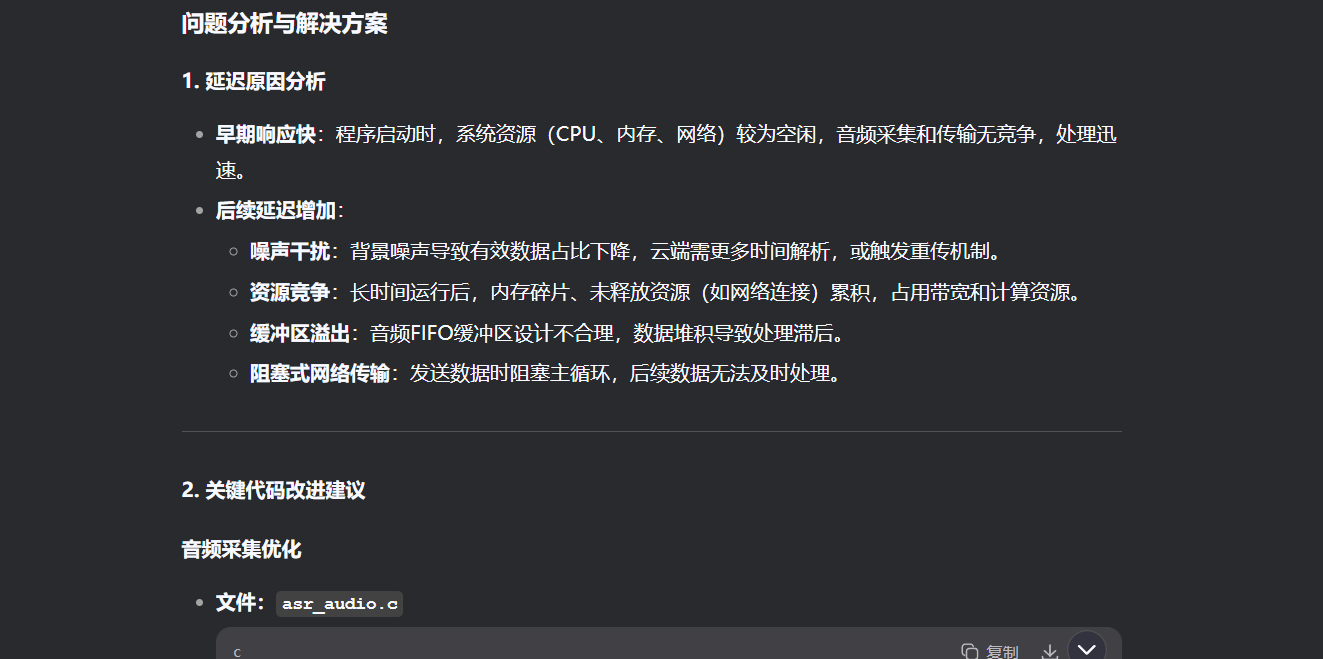
目前来看 说的越早 响应越快 考虑滤掉噪声?
-
问过ai 感觉可以参考
-
感觉转向不够丝滑 是不是舵机pid的问题
-
磁偏角 南方城市 建的可能不方正
-
或许可以 按键 作弊科目四(不好弄 需要多个按键)
-
单改 单个文件编码 可
-
-
看来关的时候 和这个有关系
-
静差没调
-
或许可以加按键 再采集
-
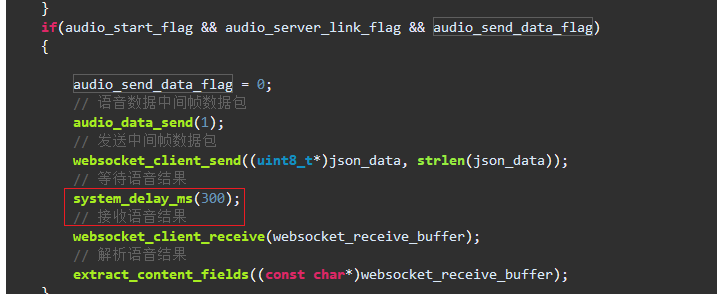
300ms合适吗
-
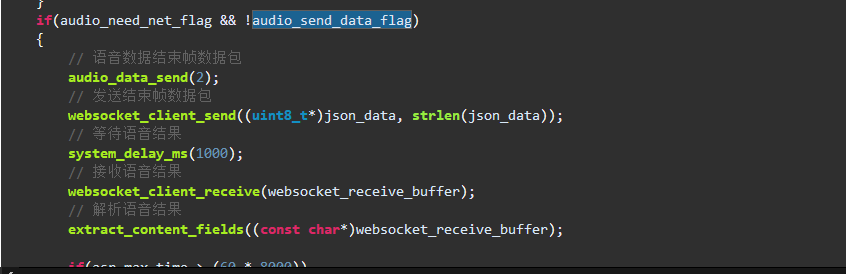
为什么结束的时候等那么久
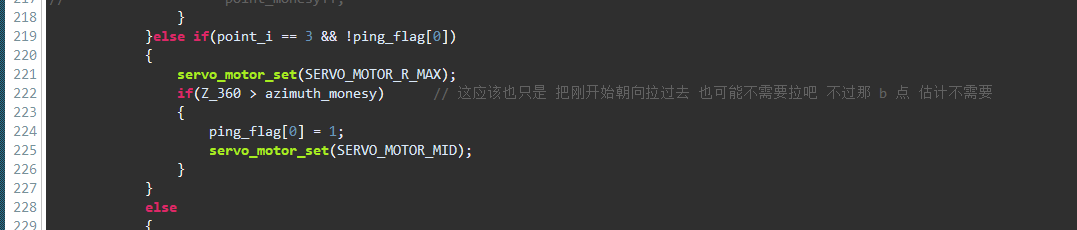
-
群里那个报错出在哪呢 (连接websocket时)
-
-
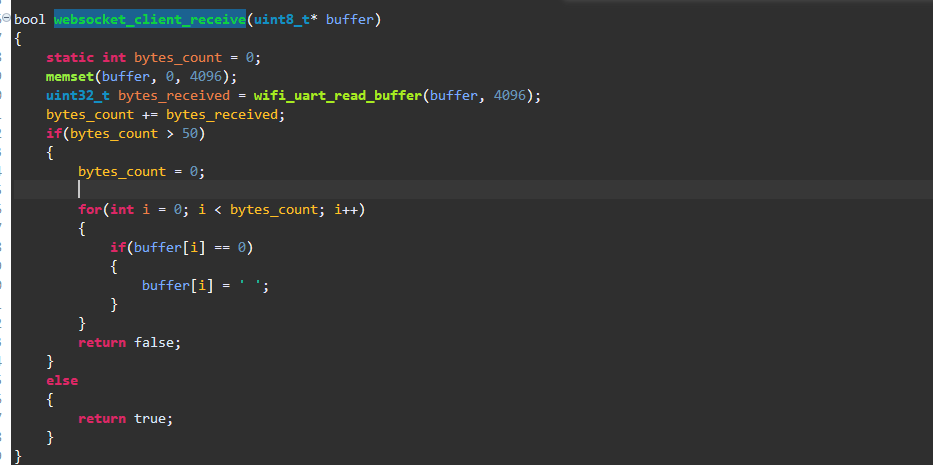
这代码有问题
-
一核 呢?


-
动态修正要开吗
-
过程:
- 按下按键 等待 连接websocket 连好后
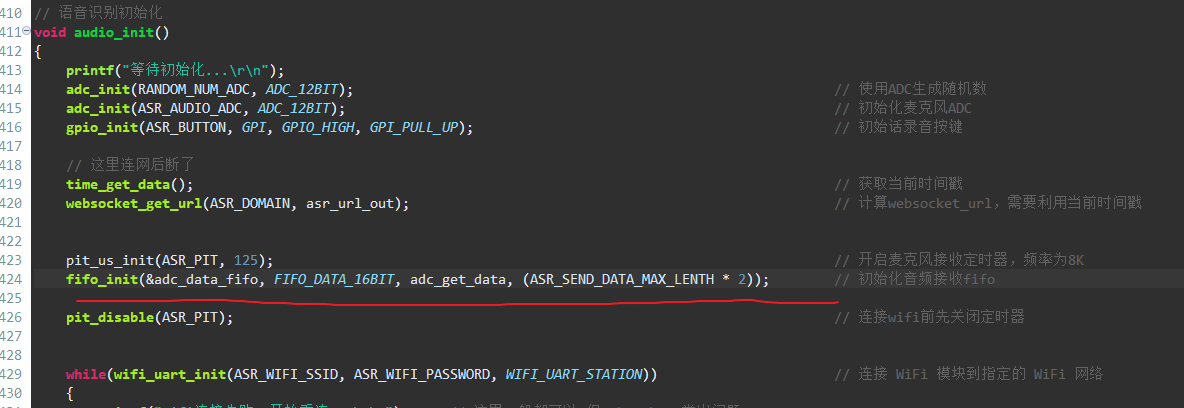
- adc往fifo里写 等待 大约0.5s 去发给 讯飞
- 明天问问ai 哪里会卡
-
改成*4 会 2次后弹 时间到了 但值没到
-
感觉是开太大 故障了
-
可以考虑用数组完善
-
我还是不懂为啥 说了以后要等好久
-
累了 不搞了
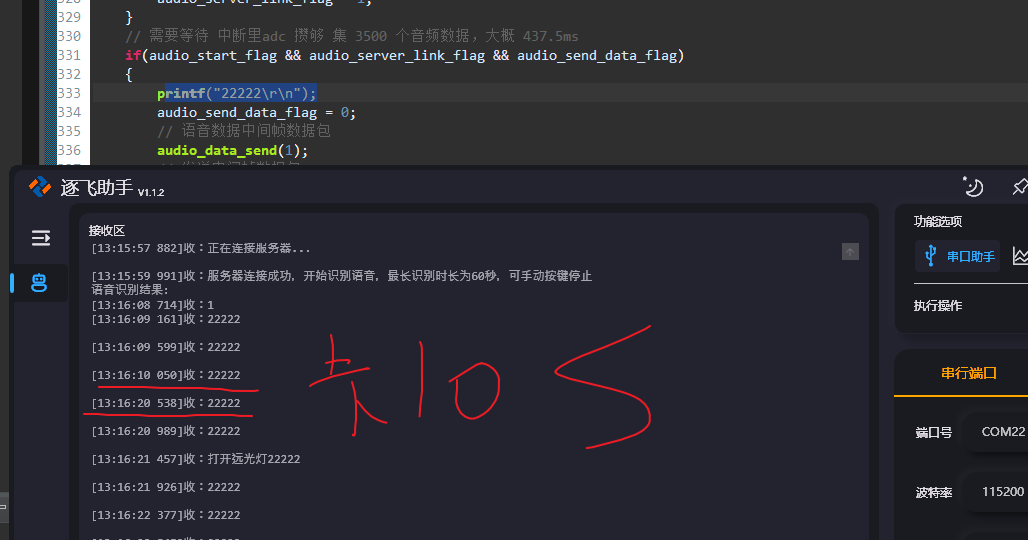
- 给人一种 说话了 才卡的感觉
- 统一回来的居然是(不完全统一 较长的时候可能分开)
- 这一次 数据没卡 过了一秒卡了10秒
- 逐飞 有这种转换库

-
改成1s好像没事啊
-
电脑热点能用吗 到时候
-
说完要再按
-
搞定了???

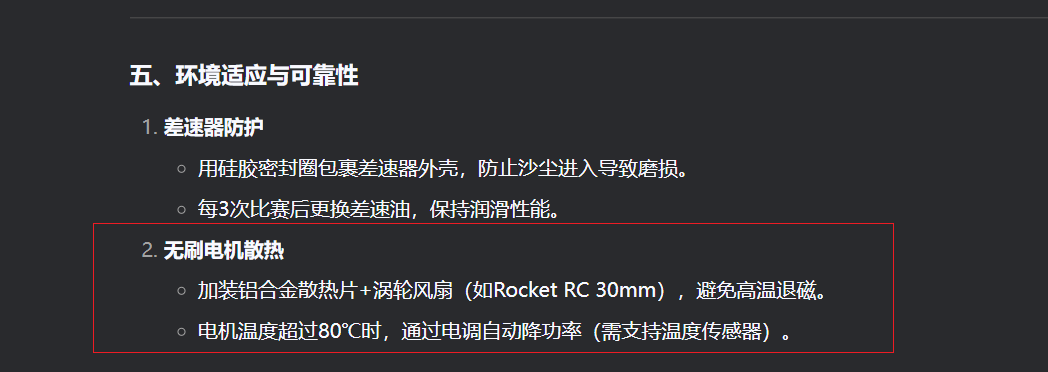
- 防水??
- 碰撞防护
- 我那里面有吗
-
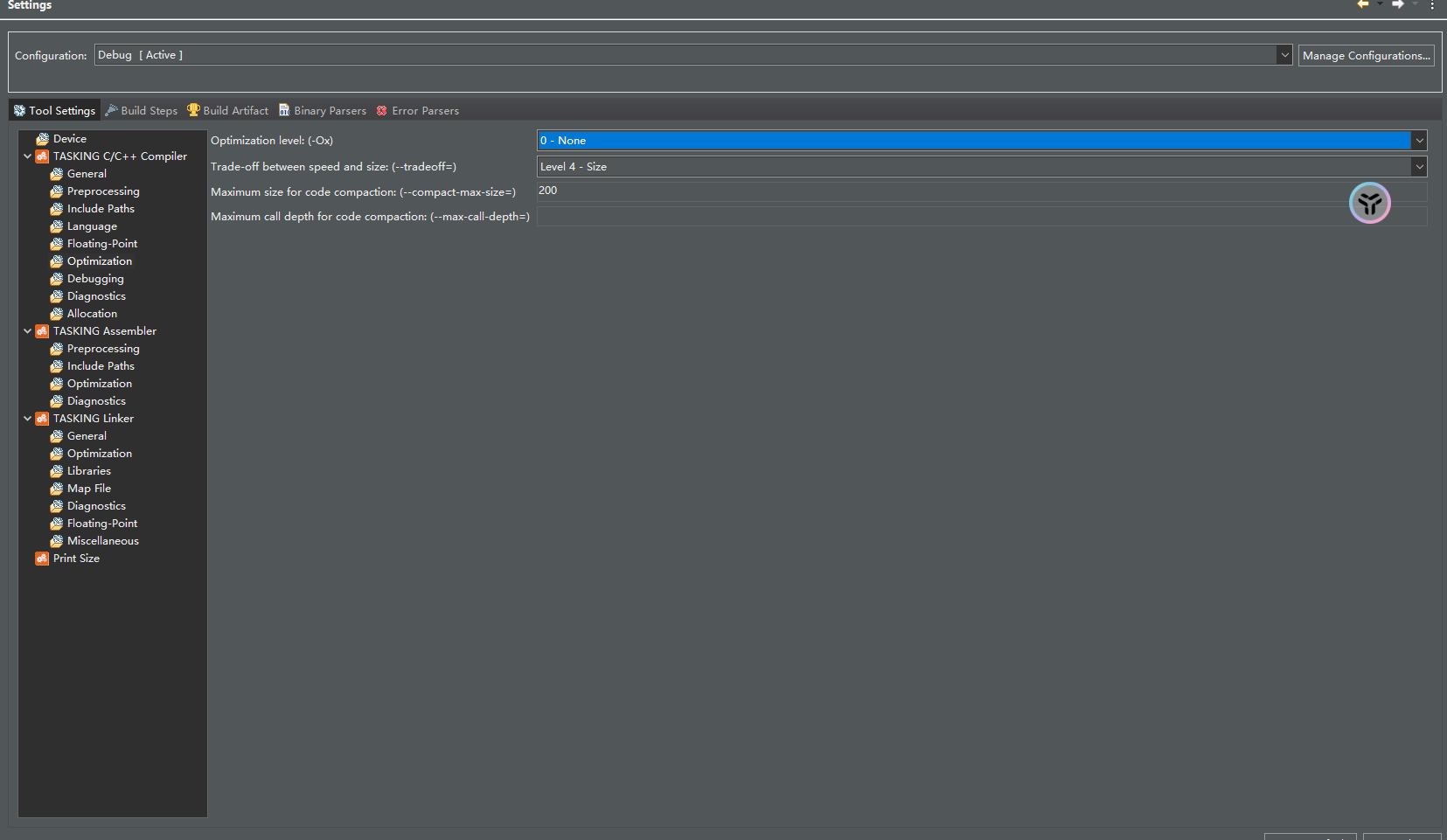
这几级优化 用处大吗
-
遥控的数是 慢于现在一点的感觉 尤其通道一二
-
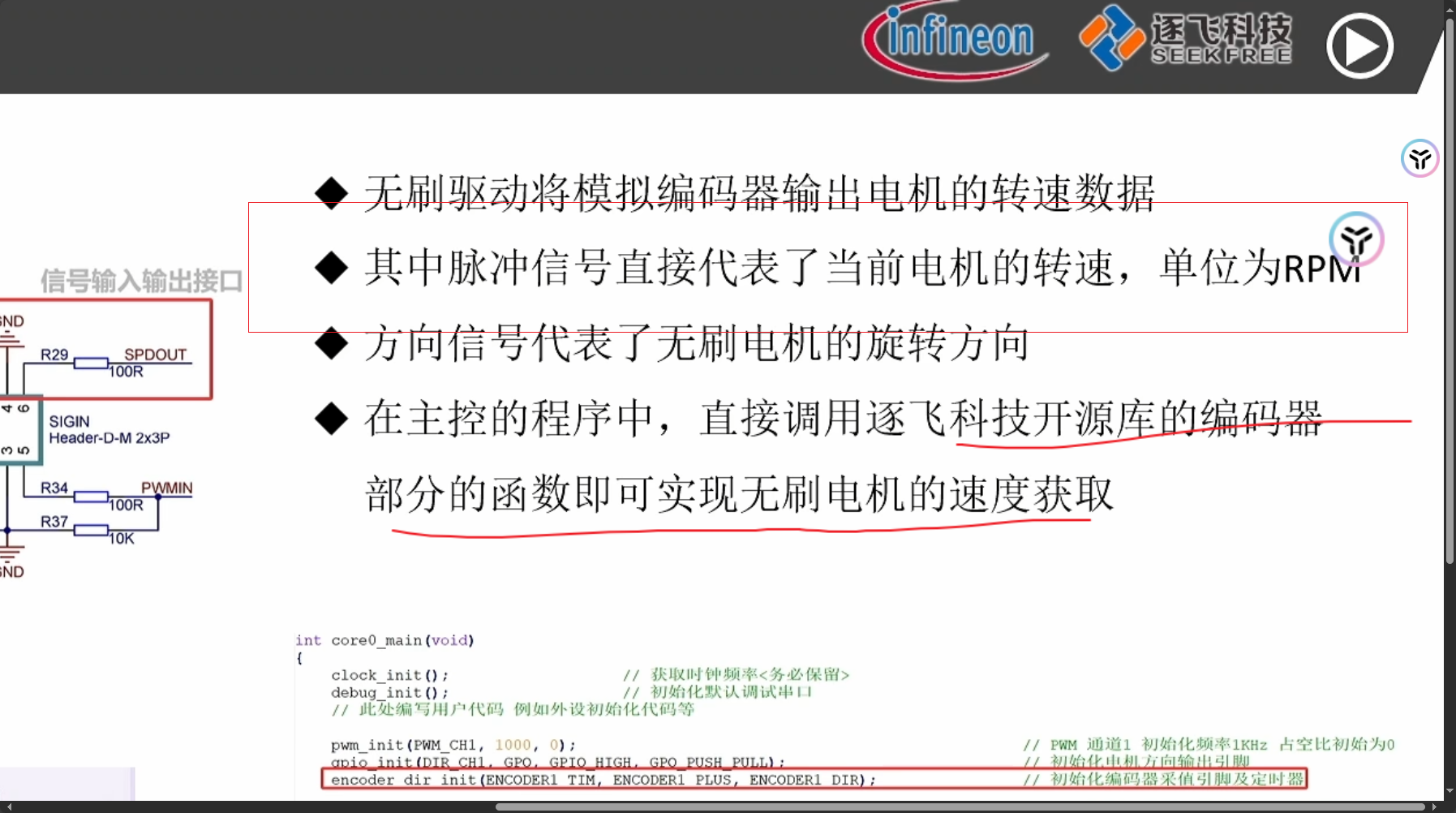
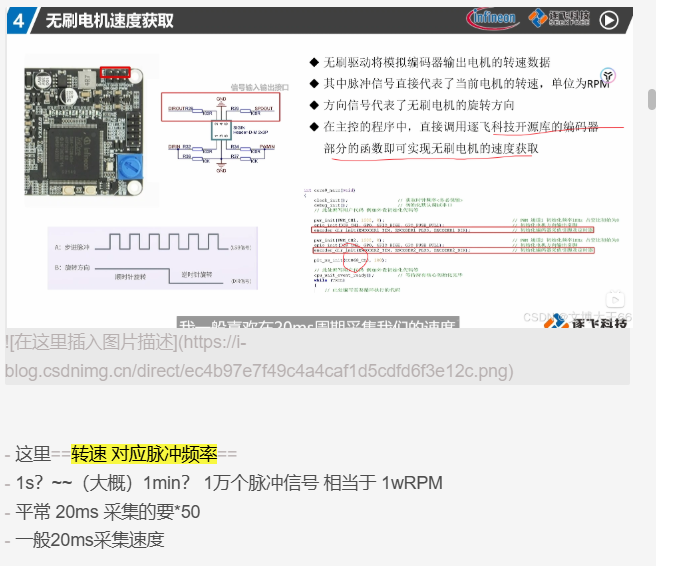
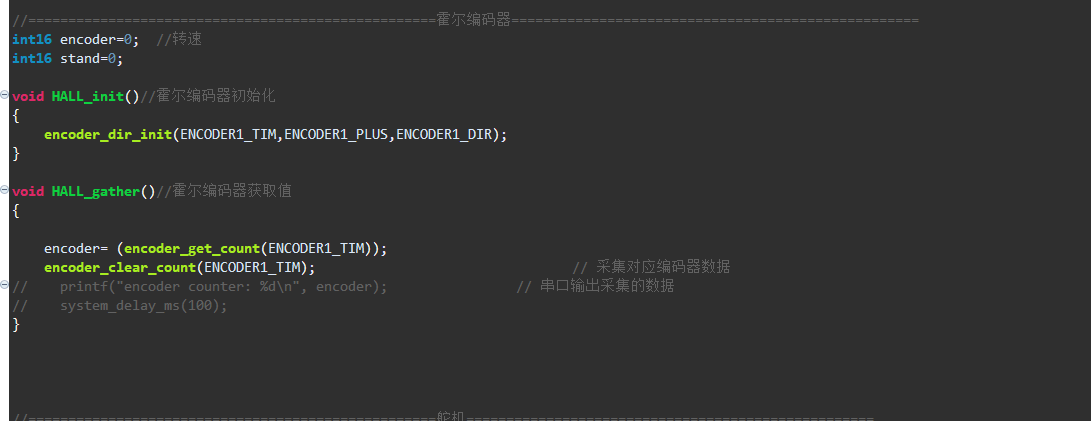
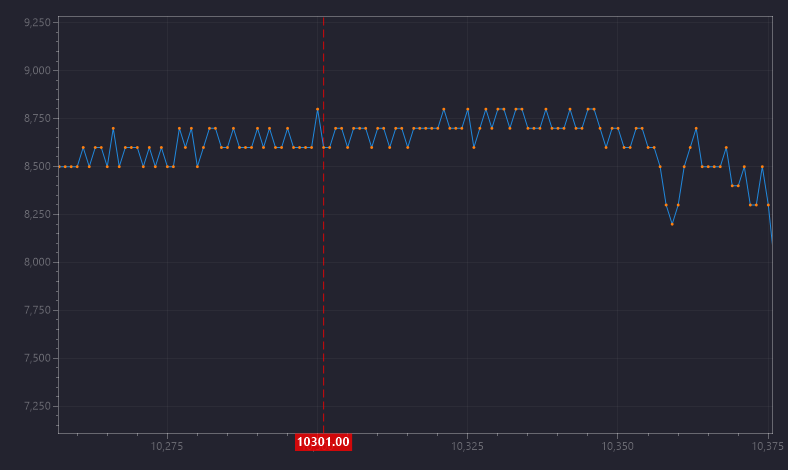
编码器得到的 数 在一个大约10的范围波动 那惯导还好用?
科一
- 加速 匀速 减速
- 去调 加速到最大的值
- 怎么对驱动测试 极限呢
- 这个或许可以和路程挂钩
- 50 还是5
- 应该就是一个 15 一个30
- 触发应该是停转吧
山东17国赛报告
17省二报告
报告(提到负压)
-
这100ms 逐飞助手居然有点卡屏 不能是c盘刚满的问题吧
-
老定义变量显示冲突 了解一下互斥那啥
-
示波器不显示啊 哎(已解决)
-
电机 舵机放中断
-
他当时 编码器值那么小能用?
-
验证了一下转速差不多?和计算的
-
电压表测一下 给电机的电压 和主板给驱动的电压

- 500pwm 下
- lora能用
-
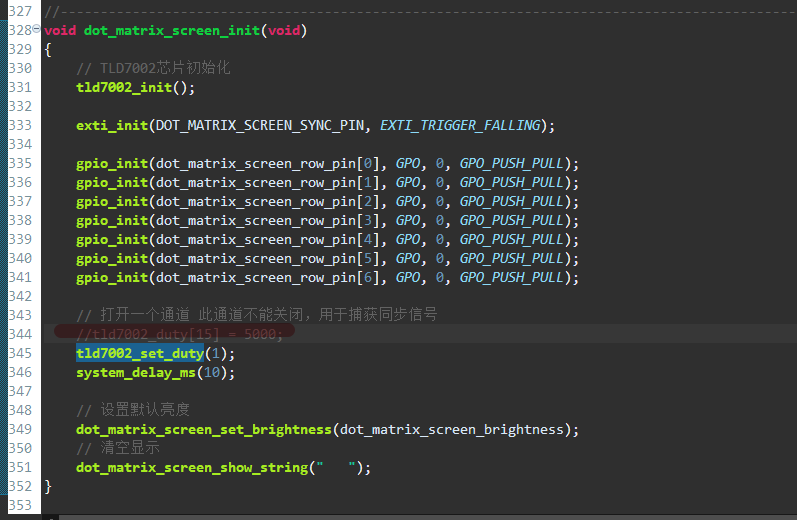
按照这个 点阵屏 摄像头会和GPS冲突???
-
flash 会随下载程序丢失吗 (我下了 另外一个程序都没事)
-
按键三 看图多余了
-
遥控的值 可能还得再矫正一下
-
惯导不能维持太久?
-
orrn里清屏跑 看看
-
我之前重跑没事 是不是也是因为 我把IMU的 给重置了
-
发现 虽然每次跑的点差不多 但是 当两个
-
pw 给一次就会一直维持
-
备点 机密螺丝
-
写一个 脱控保护 常常 12通道值一样
-
把遥控的中断 放到一核 不在 脱控
-
速度确认好没要不要放这
-
这个介绍的惯导不错
-
惯导先放弃
-
还是稳了一会的
-
感觉加速 没那么快
-
拐弯处有 漂移
-
IMU的文章里面又二次滤波了

-
最小可检测转速 所以手推不大行吧(可以的应该 不能打滑太拉了)
-
采点和跑点不是一个点 为什么
这个系列有摄像头教程
- 加个滤波再试试呢
-
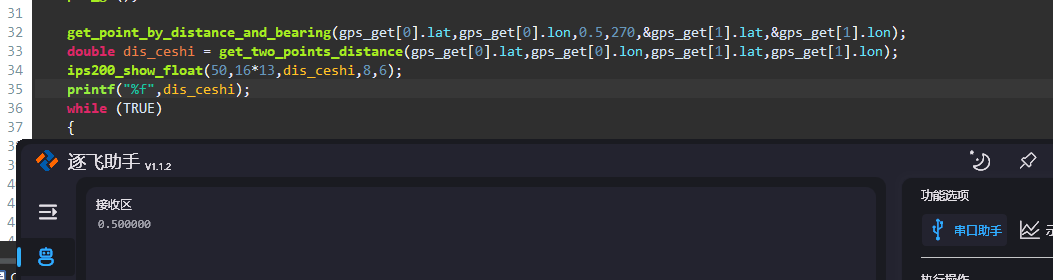
第一次遇到屏幕上是0.49999 printf是0.5
-
gps经纬度 最后一位 大约 == 0.1m
-
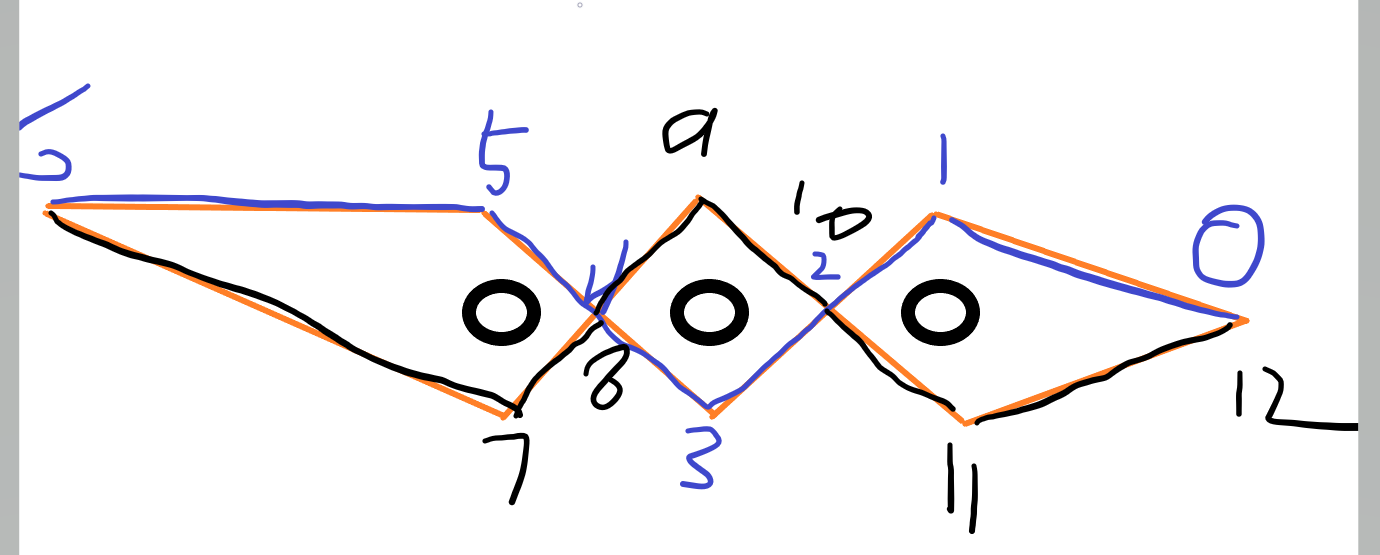
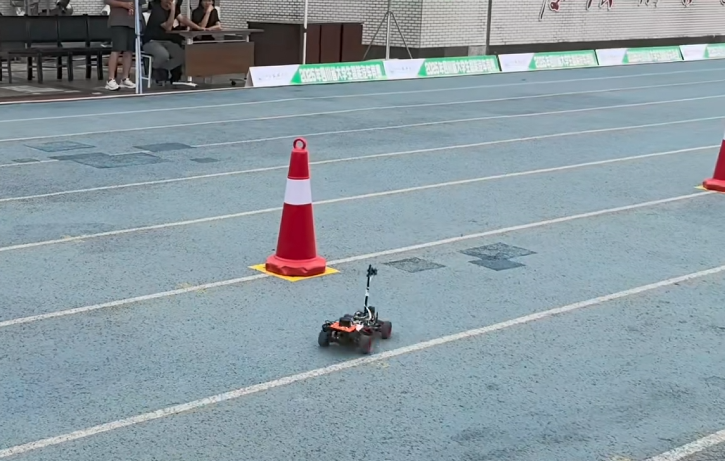
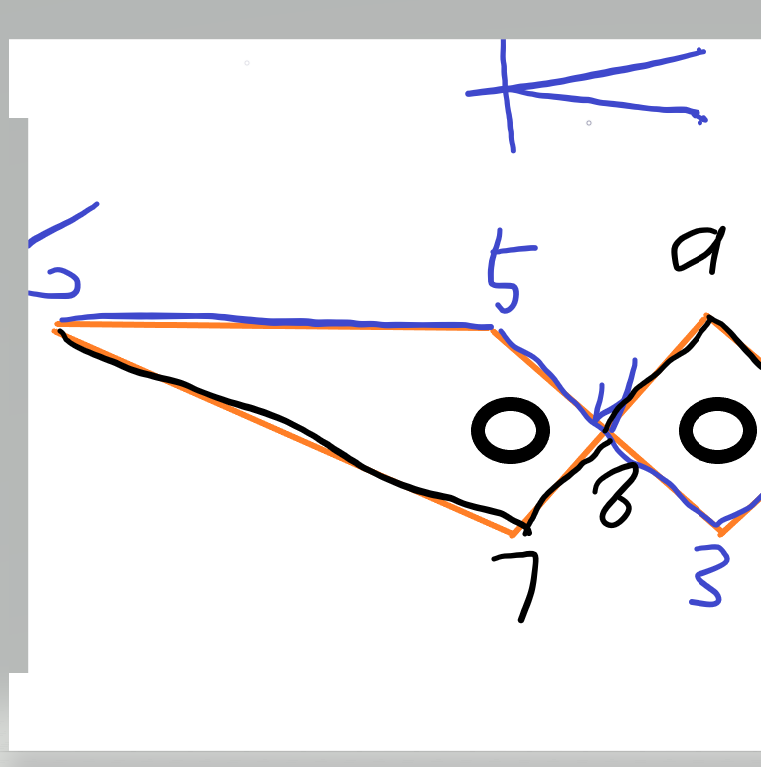
三锥桶排点
-
能不能绕过 有那么一两次 300pwm不过 500就过了 无法排除GPS的因素
-
突然发现这个并不是接收到 才触发
-
多去推推车
-
如果我不再是跑到下一个点 而是 角度对齐呢(不大行)
-
加防撞
-
跳弹簧
-
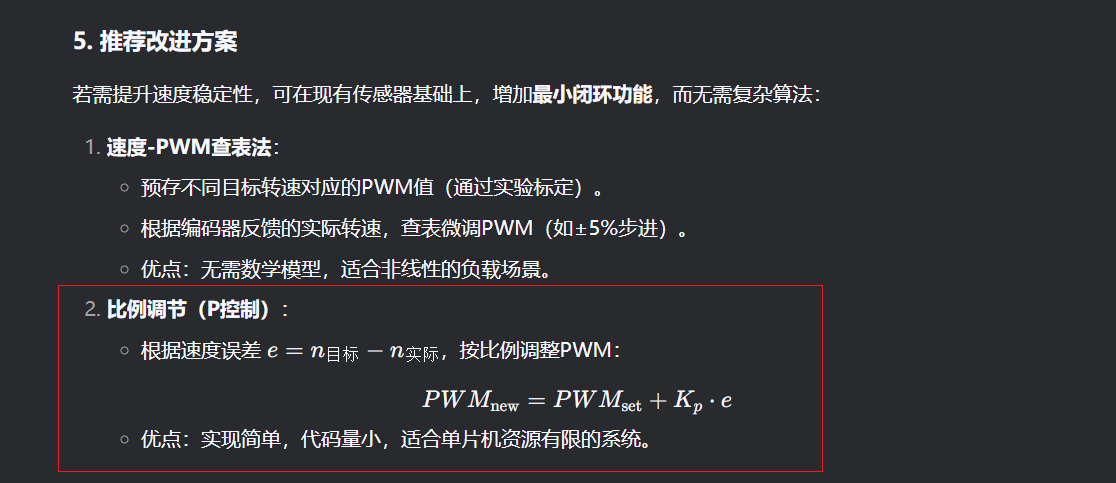
加偏差的p
-
试 跳点

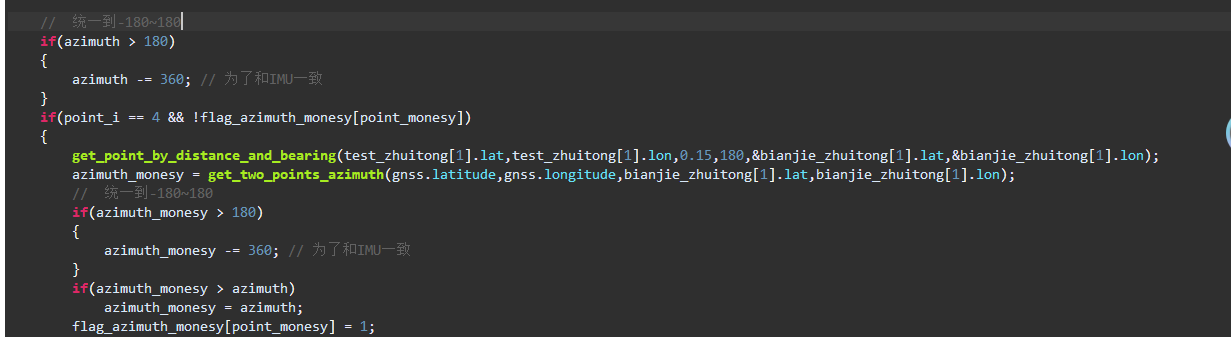
- 计算方位 用的实时的 这就导致锥桶中间有的过点 是 垂直于锥桶过的
-
不加= 之前走的大角(加上也会应该是GPS问题)
-
跳点后 轮子会抖几下(应该是稍转一下 对准了吧 舵机归中值了)
-
在二次跑前 初始化 卡死过(感觉是按键冲突了 )(是按键1 没反应 按了4后 和 陀螺仪初始化重了 就卡死了)
-
error *5 直接摇摆

-
GPS在后面 本来就会慢点 锥桶两侧的点 或许可以后移一点(我感觉车前面碰到就行)
-
为什么速度快了 半径就大了
-
左打死漂移更快
-
15号中午 科二来回 陀螺仪只差0.几度 多次后到达1
-
换点还是挺早的
-
把中间点去掉呢
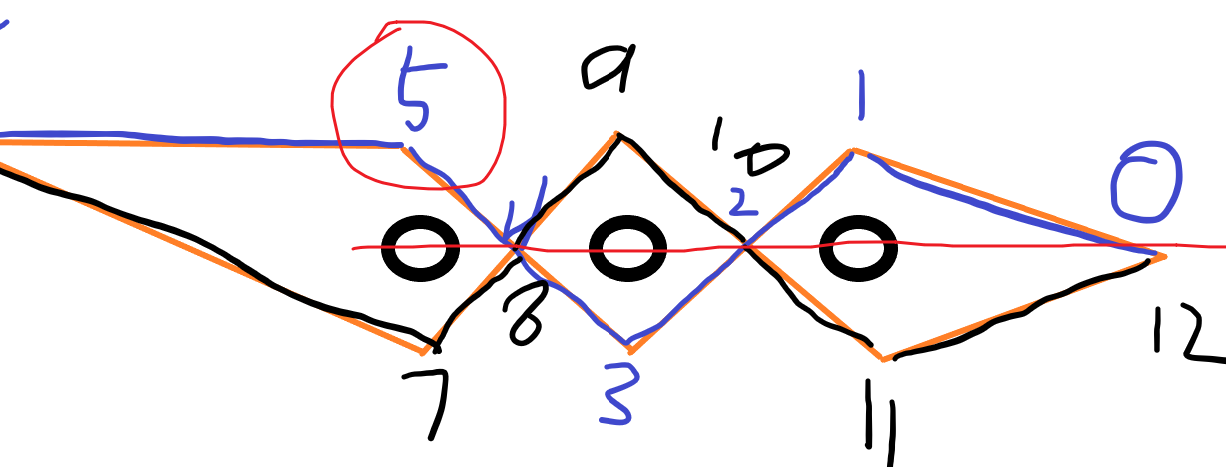
- 5换点距离 直接过了锥桶就行
- 1来说发车 可改
-
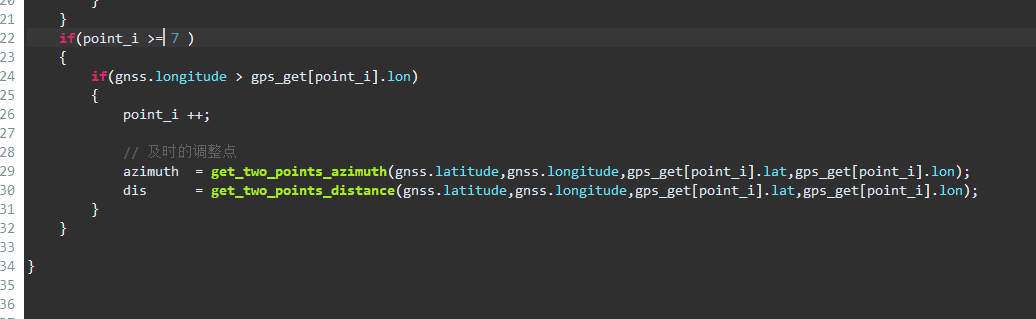
567这 应该涉及 6 取哪
-
以及 要漂移转向吗
-
换点距离大了 就通过和锥桶比较得到一个固定偏角 再和 两个打点的偏角 做比
-
去快速转
-
换点距离就是一个范围 罢了 根据打到范围里哪个点去做调整
-
gps那个数组 没用的后面都是0吗(本来到8 发现到12 想起来是因为 手动改点 存进flash了 12 后都是0)
-
不够锥桶生成点 我应该没手动调过点
-
修正后 图像看看
-
gps 13颗左右 科二跑回来时 偏北 且有一次拐大弯
-
13颗 时 300 500 300跑 会提前打不少 导致路径撞桶(大概因为去掉 锥桶间的点了 同时又车头)
-
重新发车时 按下按键1 屏幕仍在跑的状态(可能这个导致卡死 imu(4)多次初始化)
-
gps究竟受天气预报里哪个影响 还是因为时间短了 我都一支烟了
-
为啥 拿起来 和放地上 经度 差个最后位的3呢

-
咋他就不跑多
-
锥桶 半径大概 13cm
-
为啥当时 没-180 也正常跑()
-
gps搜星少 一看电源那根线出来好多 插回去后 从13 变成19
-
胶带不会影响GPS吗

-
在第二个点最后 扭了一下
-
去的时候第二个点 绕的弯很大
-

-
手推 过了第一个点 这个值变成5了
-
摄像头转接板 不用自己画吧

-
我这差 18 orrn那个差20 我见群里还有差 20多的
-
2核好像不能同时屏幕显示
-
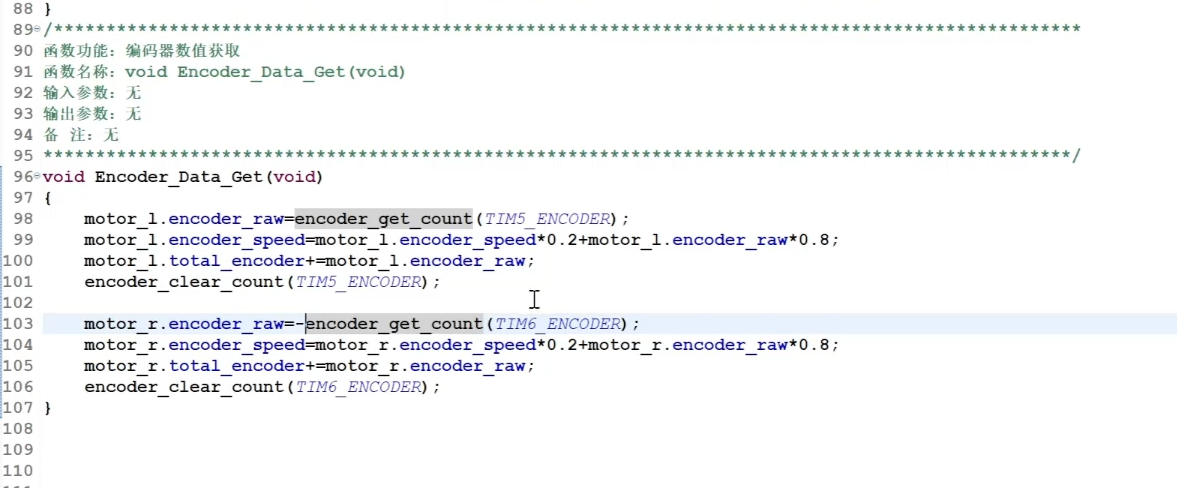
陀螺仪能换成double吗
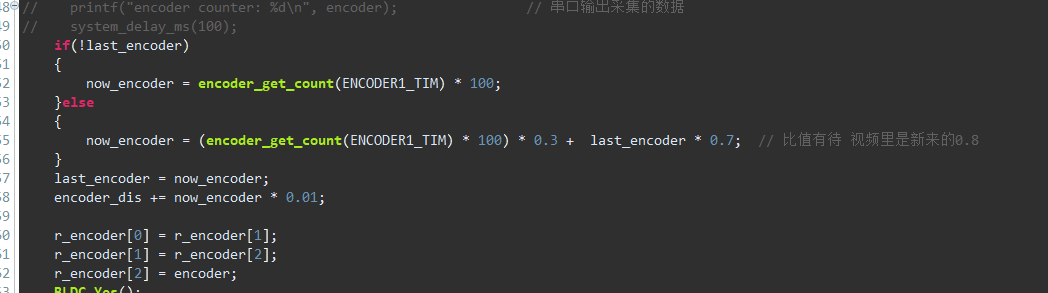
- 编码器这写的不太对
- encoder_dis 初始不为0 发现 驱动板复位一次就增一点
- 主板复位后不变
-
蛇形前进角度是不是大了
-
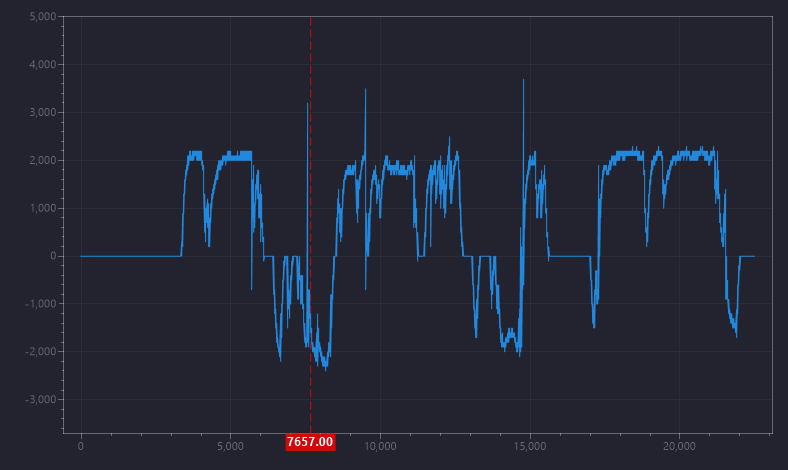
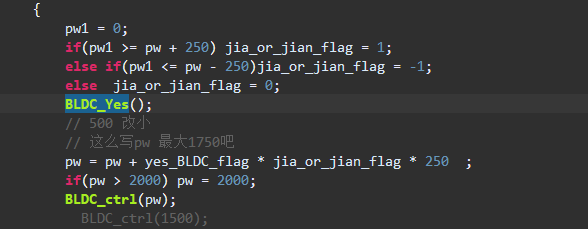
无刷测试程序
-
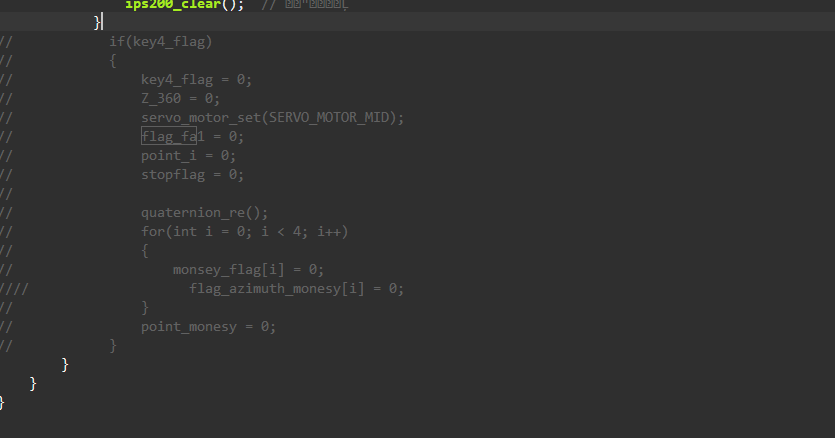
科四 程序卡死
-
科四 编码器用的double 没改设置
-
科四 几种组合多试 看哪个识别不上
-
看来有问题时 得多烧录几次

-
别说成这种
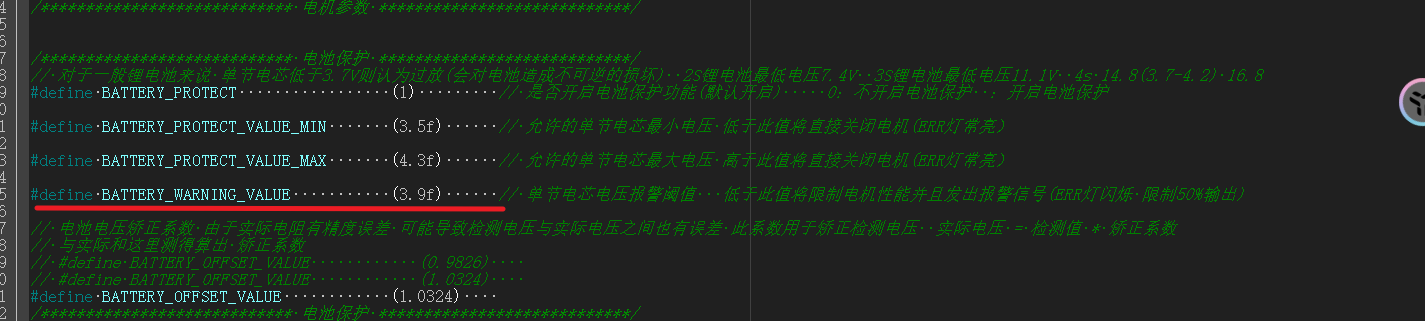
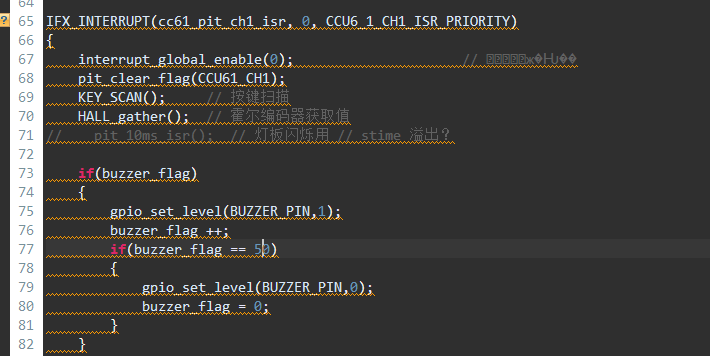
- 为啥我没遇到过 闪烁(好像遇到过)

- 他这闪烁 是3.7
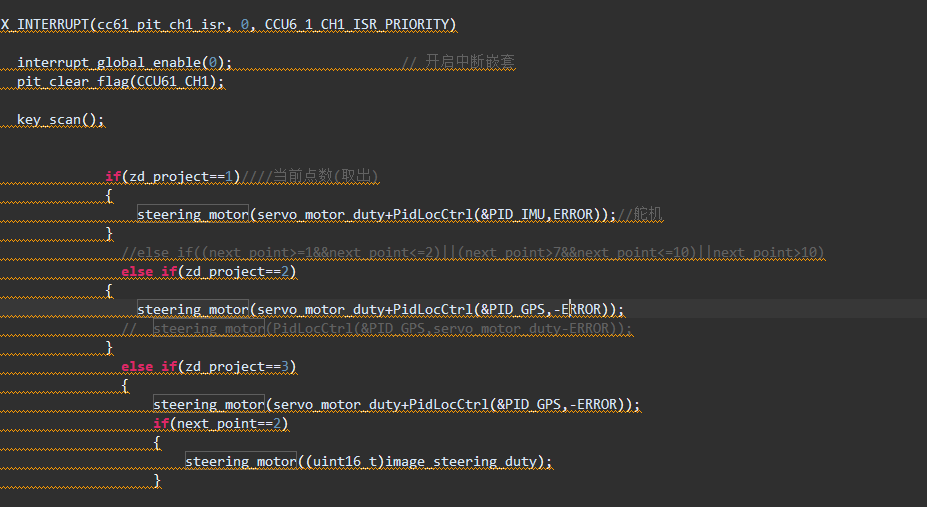
- 他把舵机放isr里了
-
这就是老戏骨 (发车和结束 应该都在线前面)(速度更快)
-
为啥 只用IMU的值呢
-
第7个点不准 (可能0的问题)(不是0以后立马准了)
-
越过所有点 再换点呢
-
我那打死 能像他 高速 转向也那么快吗
-
直行 调教
-
只改换点距离 900 也能跑 不过感觉看运气
-
感觉舵机没必要放中断吧 (就算放中断 不也得等算出来了才行吗)
-
把gps 其余的串口都关了 跑跑试试呢
-
要不要提前给他放平呢 (转角)
-
把2改成越过再 转平 反而拉的大了
-
不如 移动点(再加上直接固定打角) 降速
-
天气 变了点 900 回来时 没过第一个桶 并且700调成 1m 就能跑(看来速度 改了 点位也得变点)
-
改点真好用

-
30.78515,103.88928
-
大概率郫都区
-
发车后 要修正imu吗(修一下吧 可以先从记录入手)
-
那个画的路径 纬度一样也不一定是 和屏幕垂直的(我室内随便按了三次踩点)
-
科二多试几个路 看看是哪个点不行
-
科一 第一次直接往左跑(东边) 但是存的点在 西边 (一般转圈跑就是没开陀螺仪)
-
科一第三次左转圈 时 车朝右翻了 看一下重心 减速直接减下去得了
-
而且科一 返程 没咋加速
科三
- 如果 可刚开始 过坡道 或者桥洞 真的能不依靠GPS跑平吗
-
在写 蜂鸣器 延时 2s时 明显感觉比两秒长
-
定时器 好像 慢了 (上电原因?)(开着电源一次没慢 0.5s 左右)
-
草坪前要减速吗
-
第一次 把颠坡路段放 发车点前5m感觉都没跑起来(发车点还是离 计时的地方远点好)(改成7m明显跑起来了)
-
去的时候 50cm坡道过了(多次都过了)
-
颠坡路段 过以后 方向好几次偏了点
-
再看看 坡道 颠坡 过了后车有没有明显偏
-
返航几次 路径不一致 有时候在中间
-
加上航向角修正 试一下
-
摄像头试(群里那个跑道白线说的思路)
-
比赛的时候记得把 遥控保护关了
-
灯板换芯片试试那个脚通不
-
买那种一块连的杜邦线
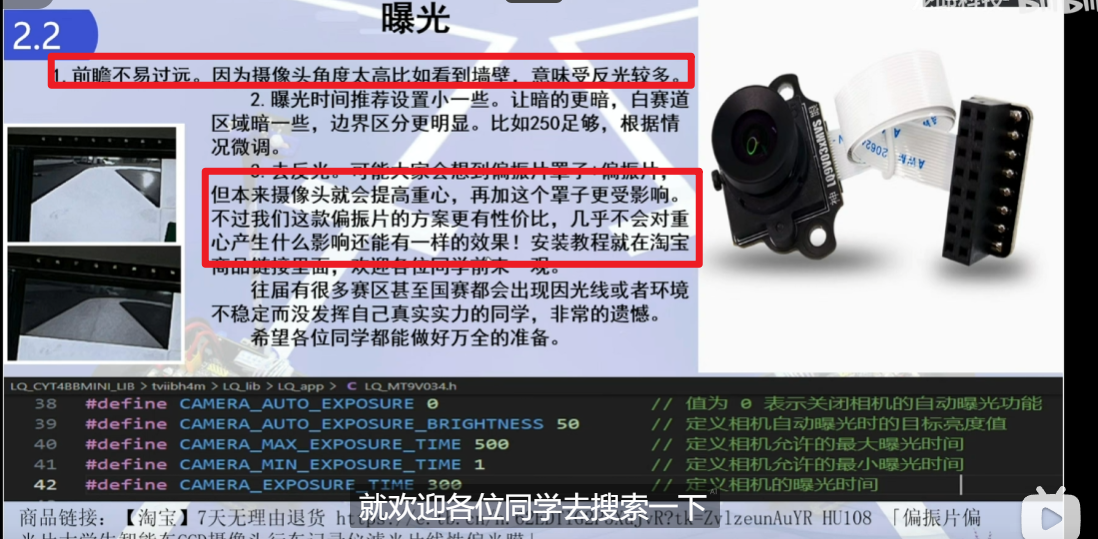
- 前瞻远了 会把无关的 影响到 阈值
- 龙邱的 偏振片
-
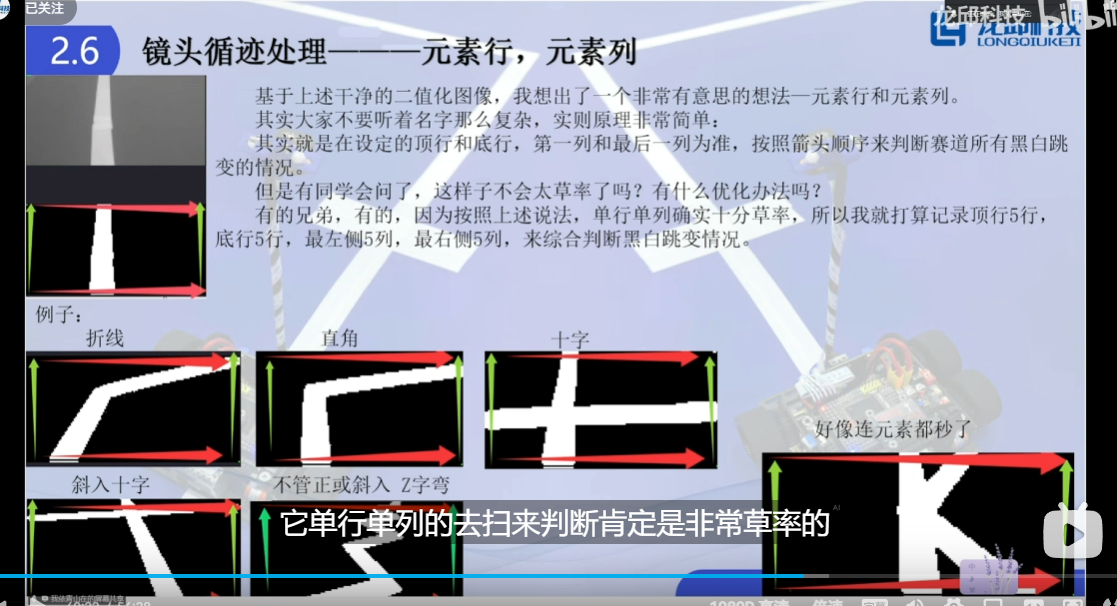
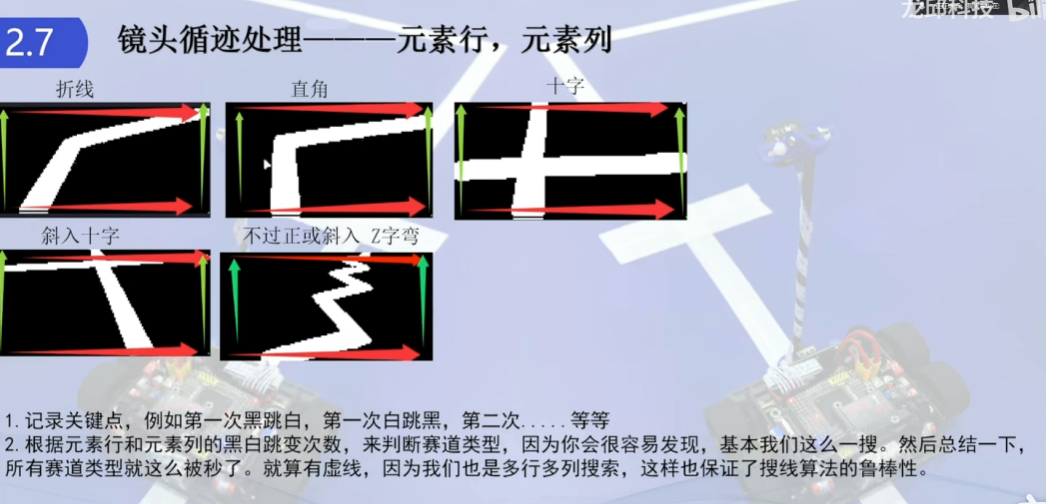
他这只是为了 判断元素 (我也能用)
-
我觉得可以采用 那条线 不连续 选好后 上面看看性能决定是否用迷宫
-
试一下 故意不正北发 第一个咋样
-
上面这种分析可以从第一次 err为0 分析(应该是有横向误差 且 仍旧不是直着过去 偏航角依旧为 IMU误差)
-
塑料柱(应该可以) xh2.54 板子上的队名(都对)
-
到第二个点 故意斜着进 看看和 发车时 大偏差一致不
-
当斜着发 的时候 回来明显感觉是 到点附近才猛拐(之前也有这种感觉 但好像没这么明显 )(也可能天黑)
-
可以考虑修改2m 让车别漂那么远

- 验证 修了以后 返回路径(加坡道 颠坡)
- 验证 减速漂移
- 验证摄像头间距
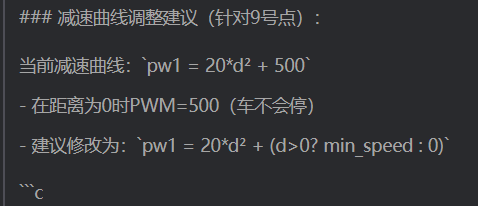
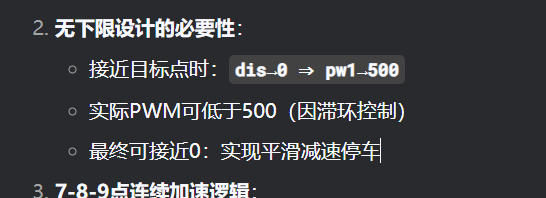
- 接近点 500 影响减速吧
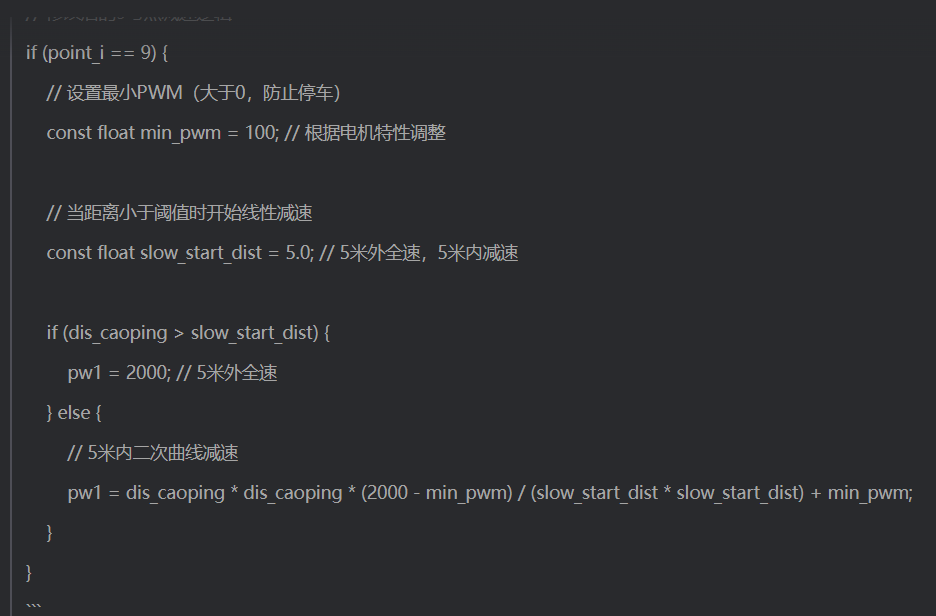
- 可以改成 5m外只增
问一下几点整各个科目- 摄像头阈值 没有白线时太低了 不要
- 白线贴中间试试 (调整图像大小)


-
优化还是有必要改一下的
-
这point_i 0核天天用 甚至在一核存着
-
这个主板遥控好像那电源线一按 就触发发车了
-
科目二 第三个点 改了后路径好很多(对于第三个桶 有时擦 有时不擦 可能和GPS有关 也可能和 发车的角有关)
-
第一段快速跑后(对于第一个点来说 换点距离是问题)
-
四个锥桶呢 五个呢
- 可以把 point_i = 5 也写个

- 这个方向不行
- 四锥桶没试 (但 打死降速 让过的更轻松)
- 科二 刚开始能用惯导吗
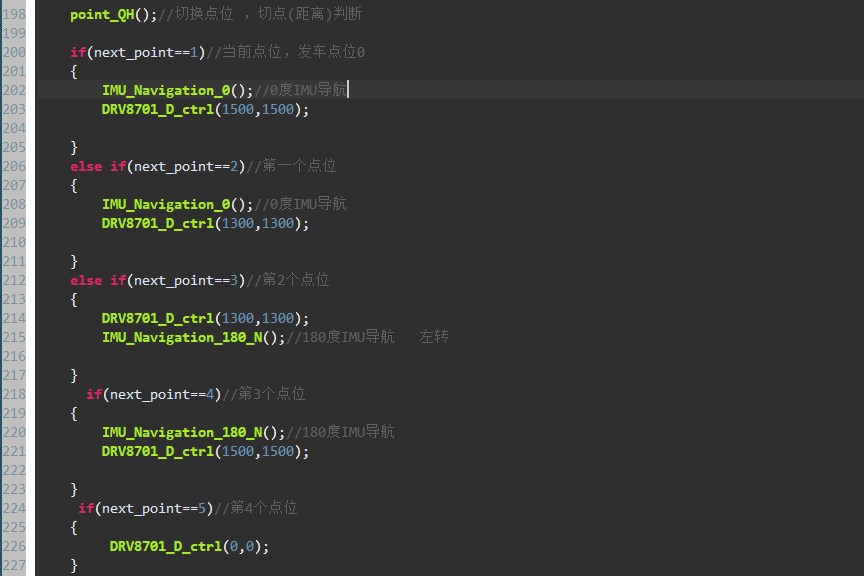
- 科二 6 (用之前加速效果不明显 )(感觉不如直接给PWM)7点
- 科一的转弯
科三
朝北
发车线一坡道前6.4-0.1m = 6.3m
坡道长1.5m
坡道一搓板路11.7m
搓板路长1.1m
搓板路一掉头线14.6m
前半段 35.2m
掉头线一草皮12.05m
草皮长1.15m
到草皮后 13.2
差 22m回去
-
如果下大雨 开跑关按键
-
科一要跑不直 就用科三的多个点
-
点修的越早(航向角修正IMU) 后面轨迹越直吧(针对科三桥洞)
-
遥控继电器(主板可能要留接口)
分析
科二

-
漂移过来
-
点去的时候 和回来的时候 都加速

-
带个简历

-
赛道长
-
很可能不能现场下代码
-
死亡摇摆了
-
屏幕为什么灭了有时候
-
看群里遥控 问布丁新遥控
-
看卓晴那个专栏 看看去年国赛规则
-
内倾 帮助低速转向时回正 主要因为重力
-
有一次科一跑着时,只能遥控,不能自动动了(已解决 科一换点那的问题)
-
龙骨上四个 滑丝三个 但挺牢固
科二
RC转向时滚动中心
- 无刷驱动反着插 试了几次可以下载了
- 科一拿手里 无gps pwm说到三千了 但转的特别慢
- 这就算 一下 增了好几次 也多少有帮助吧 (间隔大了)

-
科一这个导致拿手上 转的不快吧
-
以车尾 为 gps点 好像前面会撞